Изобретение относится к машиностроительной промын1ленности и может быть использовано в станкостроении, особенно в прецизионном, например в координатно-расточ- ных, координатно-шлифовальных станках, ко- орди Г тчо-измерительны х машинах порталь)K)i-i :
По 1ь 1-: )ретения - повышение динами- ческ Н: гп пюсти устройства для перемеш1еродвигатель 12 и ходовой винт 8, предназначенный для перемещения правого конца поперечины 5. Для согласования перемещений концов поперечины 5 относительно стоек 3 и 4 при обработке заготовок посредством подъема или опускания поперечины 5 предусмотрена электрическая связь между каналами управления движением ходовых винтов 7 и 8. Эта связь осуществляется через блок 28 сравнения, к входам
иия ;1бочего органа станка путем обес- ю которого подключены датчики 13 и 14 перемещений концов поперечины 5, а выход соединен с инвертирующим входом блока 18 сравнения и неинвертирующим входом блока 23 сравнения. Для контроля за положением щпиндельной бабки 6 в нее встроен
печепия постоянства динамических характеристик обоих каналов управления за счет автоматической коррекции величин постоянных времени этих каналов.
На фиг. 1 изображен станок с устроймещений концов поперечины 5, а выход соединен с инвертирующим входом блока 18 сравнения и неинвертирующим входом блока 23 сравнения. Для контроля за положением щпиндельной бабки 6 в нее встроен
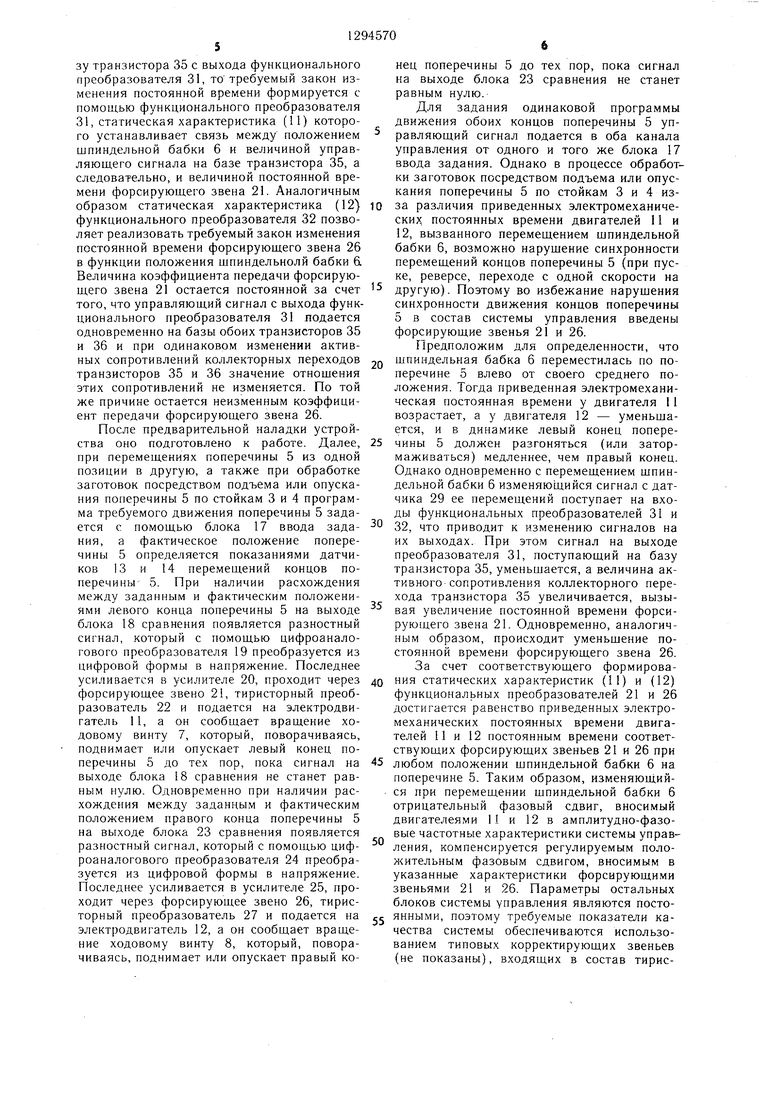
ством для перемещения рабочего органа 15 датчик 29 линейных перемещений, например станка, общий вид; на фиг. 2 - прин- индуктивный потенциометрический преобра- ципиальная схема фазоопережающего звена зователь аналогового типа, а соответствующая ему шкала 30 отсчета установлена на поперечине 5 параллельно направлению двис регулируемой постоянной времени.
Станок (фиг. 1) содержит станину 1, стол 2, стойки 3 и 4, поперечину 5 и шпиндельную бабку 6. Два ходовых винта 7 и 8, взаимодействующие с гайками 9 и 10, предназначены для перемещения поперечины 5 по направляющим стоек 3 и 4 , и соединены с валами электрических двига20
жения шпиндельной бабки 6.
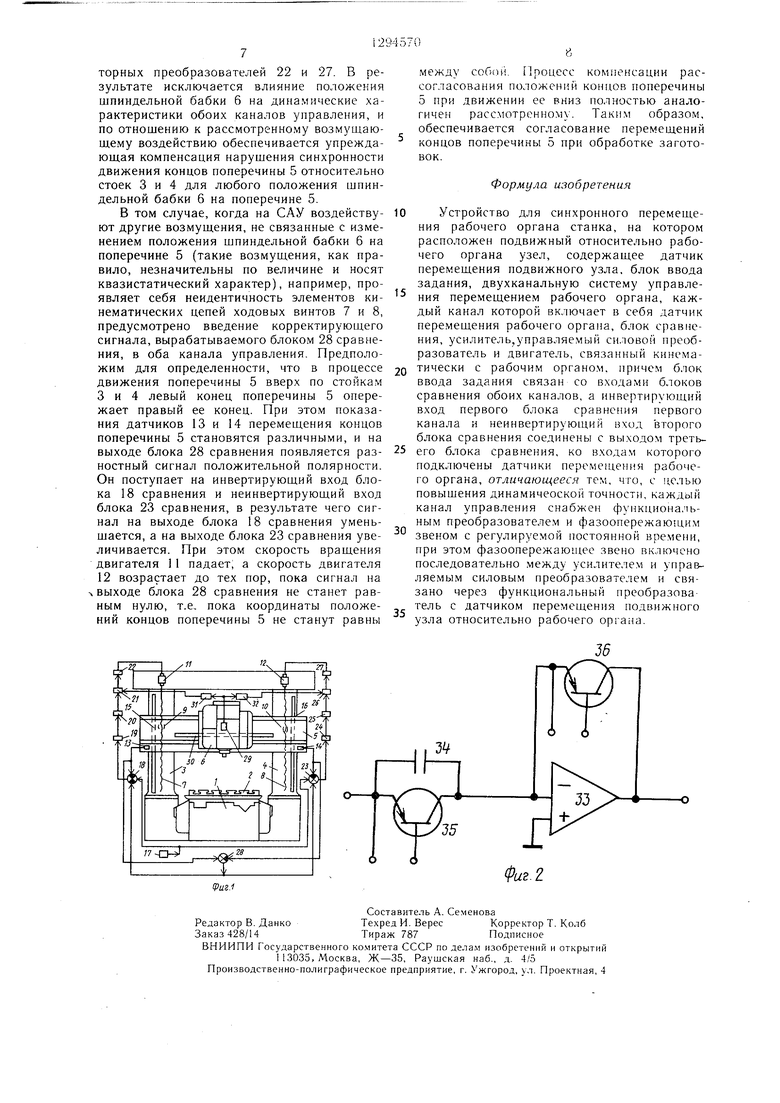
Датчик 29 линейных перемещений подключен к функциональным преобразователям 31 и 32, например диодным, а они, в свою очередь, связаны с форсирующими звеньями 21 и 26. Каждое из двух фазоопере- телей 11 и 12 постоянного тока. Два пре- 25 жающих звеньев 21 и 26 с регулируемой цизионных датчика 13 и 14 линейных пере- постоянной времени (фиг. 2) представляет
собой форсирующее звено, в состав которого входят операционный усилитель 33, конденсатор 34 постоянной емкости и одинаковые транзисторы 35 и 36, используе- 30
мещений, например индуктосинные импульсные датчики, встроены в левом и правом концах поперечины 5, а соответствующие этим датчикам 13 и 14 шкалы 15 и 16 отсчета монтируются на стойках 3 и 4 параллельно осям ходовых винтов 7 и 8. Управление перемещением поперечины 5 относительно стоек 3 и 4 ведется по двум каналам. При этом один из каналов управления (условно, первый) содержит блок 17
мые в качестве регулируемых активных сопротивлений. Коэффициент передачи такого звена представляет собой отношение величины активного сопротивления коллекторного перехода транзистора 36 к величине активного сопротивления коллекторного перехода
ввода задания, например цифровое програм- транзистора 35, а регулируемая постоянная мозадающее устройство унифицированной времени определяется произведением величи- бло.чной системы регулирования дискретного типа (УБСР-Д), датчик 13 перемещения левого конца поперечины 5 относительно шкалы 15 отсчета, блок 18 сравнения, выполнен- Q
ный, например, на элементах той же серии.Устройство работает следующи.м образом,
цифроаналоговый преобразователь 19, на-Предварительно при наладке станка согпример преобразователь кода с учетом еголасовывается положение нулевые точек отзнака в соответствующее напряжение, уси-счета на шкалах 15 и 16 таким образом,
литель 20, фазоопережающее звено 21 с регу-чтобы они лежали в плоскости стола 2.
лируемой постоянной времени, например фор- 45 При этом обеспечение равенства коорди- сирующее звено, управляемый силовой прены емкости конденсатора 34 на величину регулируемого активного сопротивления коллекторного перехода транзистора 35.
образователь 22, например тиристорный, электродвигатель 1 и ходовой винт 7, предназначенный для перемещения левого конца поперечины 5.
Другой канал управления (условно, второй) содержит блок 17 ввода задания, датчик 14 перемещения правого конца поперечины 5 относительно шкалы 16 отсчета, блок 23 сравнения, цифроаналоговый преобразователь 24, усилитель 25, форсирующее звено 26 с регулируемой постоянной времени, тиристорный преобразователь 27, элект50
55
нат положении левого и правого концов поперечины 5 относительно соответствующих шкал 15 и 16 одновременно означает и обеспечение параллельности поперечины 5 и зеркала стола 2. Положение нулевой точки отсчета на шкале 30 принимается соответствующим левому крайнему положению шпиндельной бабки 6 на поперечине 5. В этих условиях зависимости приведенных электромеханических постоянных времени двигателей 1 и 12 от положения щпиндельной бабки 6 на поперечине 5, установленные аналитическим путем, и.меют следующий вид.
родвигатель 12 и ходовой винт 8, предназначенный для перемещения правого конца поперечины 5. Для согласования перемещений концов поперечины 5 относительно стоек 3 и 4 при обработке заготовок посредством подъема или опускания поперечины 5 предусмотрена электрическая связь между каналами управления движением ходовых винтов 7 и 8. Эта связь осуществляется через блок 28 сравнения, к входам
которого подключены датчики 13 и 14 перемещений концов поперечины 5, а выход соединен с инвертирующим входом блока 18 сравнения и неинвертирующим входом блока 23 сравнения. Для контроля за положением щпиндельной бабки 6 в нее встроен
датчик 29 линейных перемещений, например индуктивный потенциометрический преобра- зователь аналогового типа, а соответствующая ему шкала 30 отсчета установлена на поперечине 5 параллельно направлению дви
жения шпиндельной бабки 6.
Датчик 29 линейных переме чен к функциональным преобр и 32, например диодным, а он редь, связаны с форсирующ ми 21 и 26. Каждое из дву жающих звеньев 21 и 26 с постоянной времени (фиг. 2)
транзистора 35, а регулируемая постоянная времени определяется произведением величи-
ны емкости конденсатора 34 на величину регулируемого активного сопротивления коллекторного перехода транзистора 35.
При этом обеспечение равенства коорди-
нат положении левого и правого концов поперечины 5 относительно соответствующих шкал 15 и 16 одновременно означает и обеспечение параллельности поперечины 5 и зеркала стола 2. Положение нулевой точки отсчета на шкале 30 принимается соответствующим левому крайнему положению шпиндельной бабки 6 на поперечине 5. В этих условиях зависимости приведенных электромеханических постоянных времени двигателей 1 и 12 от положения щпиндельной бабки 6 на поперечине 5, установленные аналитическим путем, и.меют следующий вид.
Для
Т
е Ti -
двигателя 11
Jgi + (Ч- тшб-)1Ня1 (1) Се.
приведенная электромеханическая постоянная времени двигателя 11; т„ - масса поперечины 5; Шшб-масса шпиндельной бабки 6; t- расстояние между осями ходовых
винтов 7 и 8;
С2 - емкость конденсатора 34, входящего в состав форсирующего звена 26; X - координата положения шпиндельной бабки 6 относительно шкалы 30 отсчета;
hi - шаг ходового винта 7; Кя1 - активное сопротивление якорной цепи двигателя 11;
л, См| -конструктивные постоянные двигателя 11;
-поток возбуждения двигателя 11. двигателя 12
Ф : Для
Тг
+ (f + )Кя2 (2) - форсирующего звена 26
С;2См2Ф 2
Т C2Ro2e
.
где Т2 - приведенная электромеханическая постоянная времени двигателя 12; h2 - шаг ходового винта 8; Ня2-активное сопротивление якорной
цепи двигателя 12;
С;2, См2 - конструктивные постоянные двигателя 12;
02-поток возбуждения двигателя 12. По тем же зависимостям должны изменяться постоянные времени форсирующих звеньев 21 и 26 в функции положения щпиндельной бабки 6. Это достигается следующим образом. Учитывая, что
Т, R,C,,
Т - постоянная времени форсирующего звена 21;
RI - активное сопротивление коллекторного перехода транзистора 35, входящего в состав форсирующего звена 21;
Ci - емкость конденсатора 34, входящего в состав форсирующего звена 21,
Т2 R2C2,(4)
е TZ - постоянная времени форсирующего звена 26;
R2 - активное сопротивление коллекторного перехода транзистора 35, входящего в состав форсирующегр звена 26,
имея ввиду, что, в свою очередь
RI Roie
ДгШ
где ROI и т)1 - постоянные параметры, зависящие от типа транзистора 35,
входящего в состав форсирующего звена 21; -управляющее напряжение на базе транзистора 35, входящего в состав форсирующего звена 21,
R, R,,
(6)
где Ro2 и 1)2 - постоянные параметры, завися- 10сящие от типа транзистора 35,
входящего в состав форсирующего звена 26;
U2 - управляющее напряжение на базе транзистора 35, входящего в состав форсирующего зве- 15на 26.
Получим уравнения, связывающие управляющее напряжение с величиной постоянной времени:
для форсирующего звена 21
Т|
CiRoie
Л
(7)
форсирующего звена 26
Т C2Ro2e
.
(8)
25
40
Приравнивая правые части уравнений (1) и (7) и уравнений (2) и (8) соответственно, установим связь между координатой положения шпиндельной бабки 6 и величиной управляющего напряжения на базе транзис- 30 тора 35:
для первого какала управления + (+ шшб ) -% Rя|
C,,(9)
35
для второго канала управления
Jg2 + ( + mu,6) Rя2 СйСм2Ф 2
C2Ro2e .(10)
Логарифмируя уравнения (9) и (10), определим аналитические выражения для статических характеристик функциональных преобразователей 31 и 32;
для функционального преобразователя 31
и,- i 1 si + (.. ,.л - C.RoiCia.cbT 01)
для функционального преобразователя 32
50 ,, i ( + тш.4-)- RH2 ..дч C2Ro2C2CM2(DY
Таким образом, поскольку изменение постоянной времени форсирующего звена 21 происходит за счет изменения активного со- 55 противления коллекторного перехода транзистора 35, а величина указанного сопротивления, в свою очередь, зависит от величины управляющего сигнала, поступающего на банец поперечины 5 до тех пор, пока сигнал на выходе блока 23 сравнения не станет равным нулю.
Для задания одинаковой программы движения обоих концов поперечины 5 управляющий сигнал подается в оба канала управления от одного и того же блока 17 ввода задания. Однако в процессе обработки заготовок посредством подъема или опускания поперечины 5 по стойкам 3 и 4 иззу транзистора 35 с выхода функционального преобразователя 31, то требуемый закон изменения постоянной времени формируется с помощью функционального преобразователя 31, статическая характеристика (11) которого устанавливает связь между положением щпиндельной бабки 6 и величиной управляющего сигнала на базе транзистора 35, а следовательно, и величиной постоянной времени форсирующего звена 21. Аналогичным
образом статическая характеристика (12) ю за различия приведенных электромеханиче- функционального преобразователя 32 позво-ских постоянных времени двигателей 11 и
ляет реализовать требуемый закон изменения12, вызванного перемещением щпиндельной
постоянной времени форсирующего звена 26 бабки 6, возможно нарущение синхронности в функции положения щпиндельнолй бабки 6. перемещений концов поперечины 5 (при пус- Величина коэффициента передачи форсирую-ке, реверсе, переходе с одной скорости на
щего звена 21 остается постоянной за счет другую). Поэтому во избежание нарушения того, что управляющий сигнал с выхода функционального преобразователя 31 подается одновременно на базы обоих транзисторов 35 и 36 и при одинаковом изменении активных сопротивлений коллекторных переходов транзисторов 35 и 36 значение отнощения этих сопротивлений не изменяется. По той же причине остается неизменным коэффициент передачи форсирующего звена 26.
После предварительной наладки устройства оно подготовлено к работе. Далее, 25 чины 5 должен разгоняться (или затор- при перемещениях поперечины 5 из одноймаживаться) медленнее, чем правый конец,
позиции в другую, а также при обработке Однако одновременно с перемещением щпин- заготовок посредством подъема или опускания поперечины 5 по стойкам 3 и 4 программа требуемого движения поперечины 5 задасинхронности движения концов поперечины 5 в состав системы управления введены форсирующие звенья 21 и 26.
Предположим для определенности, что 2Q щпиндельная бабка 6 переместилась по поперечине 5 влево от своего среднего положения. Тогда приведенная электромеханическая постоянная времени у двигателя 11 возрастает, а у двигателя 12 - уменьща- ется, и в динамике левый конец попередельной бабки 6 изменяюш,ийся сигнал с датчика 29 ее перемещений поступает на входы функциональных преобразователей 31 и
ется с помощью блока 17 ввода зада- 0 з2, что приводит к изменению сигналов на
ния, а фактическое положение поперечины 5 определяется показаниями датчиков 13 и 14 перемещений концов по- перечиньг 5. При наличии расхождения между заданным и фактическим положениих выходах. При этом сигнал на выходе преобразователя 31, поступающий на базу транзистора 35, уменьщается, а величина активного сопротив;1ения коллекторного перехода транзистора 35 увеличивается, вызыями левого конца поперечины 5 на выходе - вая увеличение постоянной времени форси- блока 18 сравнения появляется разностныйрую цего звена 21. Одновременно, аналогичсигнал, который с помощью цифроанало- гового преобразователя 19 преобразуется из
цифровой формы в напряжение. Последнее
40
ным образом, происходит уменьщение постоянной времени форсирующего звена 26. За счет соответствующего формирования статических характеристик (1) и (12) функциональных преобразователей 21 и 26 достигается равенство приведенных электромеханических постоянных времени двигателей 11 и 12 постоянным времени соответствующих форсирующих звеньев 21 и 26 при
усиливается в усилителе 20, проходит через форсирующее звено 21, тиристорный преобразователь 22 и подается на электродвигатель 11, а он сообщает вращение ходовому винту 7, который, поворачиваясь, поднимает или опускает левый конец поперечины 5 до тех пор, пока сигнал на 45 любом положении щпиндельной бабки 6 на выходе блока 18 сравнения не станет рав- поперечине 5. Таким образом, изменяюц.1ий- ным нулю. Одновременно при наличии расхождения между заданным и фактическим положением правого конца поперечины 5 на выходе блока 23 сравнения появляется разностный сигнал, который с помощью циф50
роаналогового преобразователя 24 преобразуется из цифровой формы в напряжение. Последнее усиливается в усилителе 25, проходит через форсирующее звено 26, тирисся при перемещении щпиндельной бабки 6 отрицательный фазовый сдвиг, вносимый двигателеями 11 и 12 в амплитудно-фазовые частотные характеристики системы управления, компенсируется регулируемым положительным фазовым сдвигом, вносимым в указанные характеристики форсирующими звеньями 21 и 26. Параметры остальных блоков системы управления являются постоторный преобразователь 27 и подается наcj янными, поэтому требуемые показатели каэлектродвигатель 12, а он сообщает враще-чества системы обеспечиваются использоние ходовому винту 8, который, повора-ванием типовых корректирующих звеньев
чиваясь, поднимает или опускает правый ко-(не показаны), входящих в состав тириснец поперечины 5 до тех пор, пока сигнал на выходе блока 23 сравнения не станет равным нулю.
Для задания одинаковой программы движения обоих концов поперечины 5 управляющий сигнал подается в оба канала управления от одного и того же блока 17 ввода задания. Однако в процессе обработки заготовок посредством подъема или опускания поперечины 5 по стойкам 3 и 4 изза различия приведенных электромеханиче- ских постоянных времени двигателей 11 и
другую). Поэтому во избежание нарушения
чины 5 должен разгоняться (или затор- маживаться) медленнее, чем правый конец,
синхронности движения концов поперечины 5 в состав системы управления введены форсирующие звенья 21 и 26.
Предположим для определенности, что щпиндельная бабка 6 переместилась по поперечине 5 влево от своего среднего положения. Тогда приведенная электромеханическая постоянная времени у двигателя 11 возрастает, а у двигателя 12 - уменьща- ется, и в динамике левый конец попереОднако одновременно с перемещением щпин-
дельной бабки 6 изменяюш,ийся сигнал с датчика 29 ее перемещений поступает на входы функциональных преобразователей 31 и
з2, что приводит к изменению сигналов на
з2, что приводит к изменению сигналов на
их выходах. При этом сигнал на выходе преобразователя 31, поступающий на базу транзистора 35, уменьщается, а величина активного сопротив;1ения коллекторного перехода транзистора 35 увеличивается, вызывая увеличение постоянной времени форси- звена 21. Одновременно, аналогич
ным образом, происходит уменьщение постоянной времени форсирующего звена 26. За счет соответствующего формирования статических характеристик (1) и (12) функциональных преобразователей 21 и 26 достигается равенство приведенных электромеханических постоянных времени двигателей 11 и 12 постоянным времени соответствующих форсирующих звеньев 21 и 26 при
любом положении щпиндельной бабки 6 на поперечине 5. Таким образом, изменяюц.1ий-
любом положении щпиндельной бабки 6 на поперечине 5. Таким образом, изменяюц.1ий-
ся при перемещении щпиндельной бабки 6 отрицательный фазовый сдвиг, вносимый двигателеями 11 и 12 в амплитудно-фазовые частотные характеристики системы управления, компенсируется регулируемым положительным фазовым сдвигом, вносимым в указанные характеристики форсирующими звеньями 21 и 26. Параметры остальных блоков системы управления являются посто10
15
7
торных преобразователей 22 и 27. В результате исключается влияние положения шпиндельной бабки 6 на динамические характеристики обоих каналов управления, и по отношению к рассмотренному возмущаю- шему воздействию обеспечивается упрежда- юш.ая компенсация нарушения синхронности движения концов поперечины 5 относительно стоек 3 и 4 для любого положения шпиндельной бабки 6 на поперечине 5.
В том случае, когда на САУ воздействуют другие возмушения, не связанные с изменением положения шпиндельной бабки 6 на поперечине 5 (такие возмушения, как правило, незначительны по величине и носят квазистатический характер), например, проявляет себя неидентичность элементов кинематических цепей ходовых винтов 7 и 8, предусмотрено введение корректируюшего сигнала, вырабатываемого блоком 28 сравнения, в оба канала управления. Предположим для определенности, что в процессе движения поперечины 5 вверх по стойка.м 3 и 4 левый конец поперечины 5 опережает правый ее конец. При этом показания датчиков 13 и 14 перемешения концов поперечины 5 становятся различными, и на выходе блока 28 сравнения появляется раз- 25 ностный сигнал положительной полярности. Он поступает на инвертируюший вход блока 18 сравнения и неинвертируюший вход блока 23 сравнения, в результате чего сигнал на выходе блока 18 сравнения уменьшается, а на выходе блока 23 сравнения увеличивается. При этом скорость врашения двигателя 11 падает, а скорость двигателя 12 возрастает до тех пор, пока сигнал на выходе блока 28 сравнения не станет равным нулю, т.е. пока координаты положе20
30
НИИ концов поперечины 5 не станут равны
35
5
5
0
0
5
И
между собой. Процесс компенсации рассогласования положений концов поперечины 5 при движении ее вниз полностью аналогичен рассмотренному. Таким образом, обеспечивается согласование перемешений концов поперечины 5 при обработке заготовок.
Формула изобретения
Устройство для синхронного перемешения рабочего органа станка, на котором расположен подвижный относительно рабочего органа узел, содержашее датчик перемещения подвижного узла, блок ввода задания, двухканальную систему управления перемещением рабочего органа, каждый канал которой включает в себя датчик перемешения рабочего органа, блок сравнения, усилитель,,управляемый силовой преобразователь и двигатель, связанный кинематически с рабочим органом, причем блок ввода задания связан со входами блоков сравнения обоих каналов, а инвертирующий вход первого блока сравнения первого канала и неинвертируюший вход второго блока сравнения соединены с выходом третьего блока сравнения, ко входам которого подключены датчики перемещения рабочего органа, отличающееся тем, что, с целью повышения динамичеоской точности, каждый канал управления снабжен функциональным преобразователем и фазоопережающим звеном с регулируемой постоянной времени, при этом фазоопережаю1цее звено включено последовательно между усилителем и управляемым силовым преобразователем и связано через функциональный преобразователь с датчиком перемещен11я подвижного узла относительно рабочего органа.
Составитель А. Семенова
Редактор В. ДанкоТехред И. ВересКорректор Т. Колб
Заказ 428/14Тираж 787Подписное
ВНИИПИ Государственного ко.митета СССР по делам нзобретеннр н открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU738786A1 |
| Станок портального типа | 1982 |
|
SU1060418A1 |
| Устройство для автоматического позиционирования узла станка портального типа | 1984 |
|
SU1242337A1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| Станок портального типа | 1983 |
|
SU1189658A1 |
| Копировально-фрезерный станок | 1976 |
|
SU650784A1 |
Изобретение относится к машиностроительной промышленности, в частности к нре- цизионному станкостроению. Цель изобретения - повышение динамической точности устройства для перемеш.ения рабочего органа, станка путем обеспечения постоянства динамических характеристик обоих каналов управления за счет автоматической коррекции величин постоянных времени этих каналов. Для этого в устройство, содержаш,ее двухканальную систему управления перемещением рабочего органа станка и блок синхронизации двух каналов управления, введены фазоопережающие звенья с регулируемыми постоянными времени. 2 ил. SS N3 СО ел 
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
