I
Изобретение относится к области машиностроения и может быть использовано в станкостроении при создании двухстоечных прецизионных станков, особенно координатно-расточных.
Цель изобретения - повьшение точности путем стабилизации положения поперечин за счет осуществления микропер емещеНИИ упр уг одеформируемым элементом.
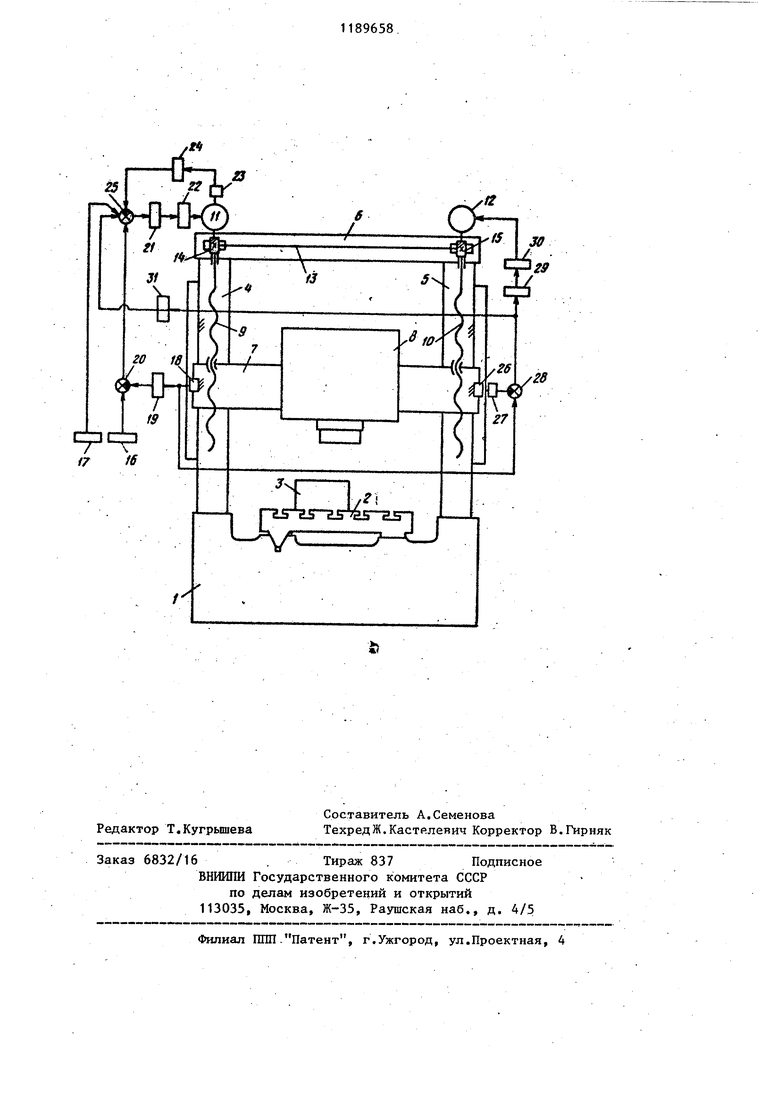
На чертеже изображен станок портального типа.
Станок содержит станину 1, по направляющим которой перемещается стол 2 с деталью 3. Станина несет портал, состоящий из строек 4 и 5 и перекладины 6, По направляющим .стоек 4 и 5 перемещается поперечина 7, несущая шпиндельную бабку 8. Поперечина 7 висит на ходовых винтах 9 и 10, связанных с электродвигателями 11 и 12 и между собой упругим валом 13 через зубчатые передачи 14 и 15.
Электродвигатель 11 осуществляет рабочие и холостые перемещения поперечины в вертикальном направлении и входит в первый канал устройства автоматического управления положением поперечины и включает блок 16 задания положения поперечины,блок 17 задания скорости, датчик 18 положения поперечины, например типа индуктосин, преобразователь 19 кода, блок 20 сравнения положения концов поперечины, цифроаналоговый преобразователь 21, усилитель 22 и внутренний контур поддержания скорости, включающий датчик 23 скорости переме щения, преобразователь 24 кода датчика, блок 25 сравнения скорости.
Двигатель 12 служит для скручивания упругого вала 13 и для микроперемещений поперечины 7 и входит в контур компенсации перекоса, который содержит в себе датчики 18 и 26 положения концов поперечины с преобразователями 19 и 27 кодов,блок 28 сравнения положения концов поперечины,цифроаналоговый преобразователь 29 и усилитель 30. Для исключения ошибки положения в процессе перемещения поперечины вьсход блока 28 сравнения положения концов поперечины через инвертор 31 связан с входом блока Сравнения скорости перемещения поперечины.
Станок работает следующим образом
89658 12
В исходном положении полеречина -7 неподвижна и установлена с нулевой погрешностью относительно строек 4 и 5. При этом сигнал от ЧПУ, подгоный через блок 16 задания положения поперечины, совпадает с сигналом о положении поперечины, поступающим от датчика 18 положения поперечины через преобразователь 19 кода в
Q блок 20 сравнения положения концов поперечины, и, вьиитаясь из сигнала на входе в блок 20 сравнения положения концов поперечины, равен нулю на выходе из него. Сигнал задания скорости в это время отсутствует. Сигнал разности положения концов поперечины, согласуясь в блоке 28 сравнения положения концов поперечины-, поступающий от датчиков 18 и 26, преобразованный преобразователями 19 и 27 кода, равен нулю. Двигатели 11 и 12 при этом работают в режиме электрического тормоза. Перемещение поперечины 7 осуществляется путем изменения сигнала с блока 16 задания положения поперечины и сигналом задания скорости перемещения .блоком 17. Сигнал от датчика 18 положения поперечины, преобразовываясь в преобразователе 19
0 кода, вычитаясь в блоке 20 сравнения положения концов поперечины из сигнала блока 16 задания положения поперечины, поступает в блок 25 сравнения скорости, где, складыва5 ясь с сигналом задания скорости, полученным с блока 17 задания скорости, и сигналом отработки скорости, полученным от датчика 23 перемещения, преобразованным преобразова0 телем 24, поступает в цифроаналоговьй преобразователь 12, где, преобразовываясь из цифрового в аналоговый сигнал, затем усиливается усилителем 22 и поступает на обмотку
5 электродвигателя 11, который начинает вращение вала 13, связанного через кинематические передачи и валы с ходовыми винтами 9 и 10. Поперечина начинает движение. Необходи0 мая скорость перемещения поддерживается внутренним контуром поддержания скорости, причем сигнал от датчика 23 скорости через преобразователь 24, блок 25 сравнения скорос5 ти, согласуется с сигналом с блока 17 задания скорости. По мере движения поперечины сигнал от датчика 18 положения изменяется и пос3
тепенно сравнивается с сигналом с блока 16 задания положения поперечины, после чего на выходе из блока 20 сравнения положения поперечины появляется нулевой сигнал. Ток, поступающий на обмотку электродвигателя 11,,прекращается, двигатель отключается.
В процессе движения поперечины на нее действуют возмущения в виде сил резания и изменения положения
.центра масс системы поперечина шпиндельная бабка, обусловленные перемещением шпиндельной бабки, вызывающие неравномерные деформации ходовых винтов 9 и 10 и их опор неравномерные кинематические погреш ности передач, которые влекут за
собой отклонение поперечины.Это обуславливает появление сигнала на выходе блока 28 сравнения положения концов поперечины, так как сигналы с датчиков 18 и 26 не совпадают друг с другом по величине. Далее-сигнал с выхода блока 28 сравнения положения концов поперечины поступает в аналого-цифровой преобразователь 29 усиливается усилителем 30 и посту896584
Iпает на обмотку электродвигателя 12, Одновременно от блока 28 сравнения положения концов поперечины сигнал, инвертируемый инвертором 31, поступает на вход блока 25 сравнения скорости и посредством аналого-цифрового преобразователя 21 и усилителя 22 меняет напряжение на электродвигателе 11. Происходит синхронное изменеQ ние момента на валах электродвигателей 11 и 12 на равное по абсолютной величине и противоположное по знаку, что приводит к закручиванию . или раскручиванию вала 13. Это поз, воляет скомпенсировать возникающую погрешность отклонения поперечины, так как скручивание или раскручивание вала сопровождается микроперемещением поперечины, равным по величине и противоположным по знаку возникающей погрешности, а возникающий крутящий момент на упругом валу 13 скомпенсирует управляющее силовое воздействие от электродвига.телей 11 и 12, что требует их перерегулирования после отработки ошибки и в конечном итоге приводит к повышению точности отработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство для синхронного перемещения рабочего органа станка | 1985 |
|
SU1294570A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU738786A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Устройство для автоматического позиционирования узла станка портального типа | 1984 |
|
SU1242337A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Станок портального типа | 1982 |
|
SU1060418A1 |
СТАНОК ПОРТАЛЬНОГО ТИПА, содержащий расположенную между стойками и установленную с возможностью перемещения по ходовым винтам от двух электродвигателей в вертикальном направлении поперечину с перемещающейся по ней шпиндельной бабкой и двухканальное устройство автоматического управления положением поперечины, каждый из каналов которого содержит соединенные последовательно датчик положения концов поперечины, преобразователь кода, блок сравнения положений концов поперечины, цифроаналоговый преобразователь и усилитель, связанный с соответствующим электродвигателем, и блок задания положения концов поперечины, связанный с блоком сравнения положения.концов поперечины левого канала,- причем выход преоб- разователя кода левого канала свя- .зан с блоком сравнения положения концов поперечины правого канала, о тличающийся тем, что, с целью повышения точности, ходовые винты связаны между собой посредством упругого вала, а в устройство автоматического зшравления положением поперечины введен блок задания скорости, связанный с введенным в левый канал между блоком сравнения положения концов поперечины и циф(Л роаналоговым преобразователем блоком сравнения скорости, связанный также через введенный третий преобразователь кода с введенным датчиком скорости перемещения поперечины, который связан с левым электродвигателем, а выход блока сравнения 00 со положения концов поперечины правого канала через введенный инвертор соеО5 динен с блоком сравнения скорости. сд ОС
| Авторское свидетельство СССР | |||
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
