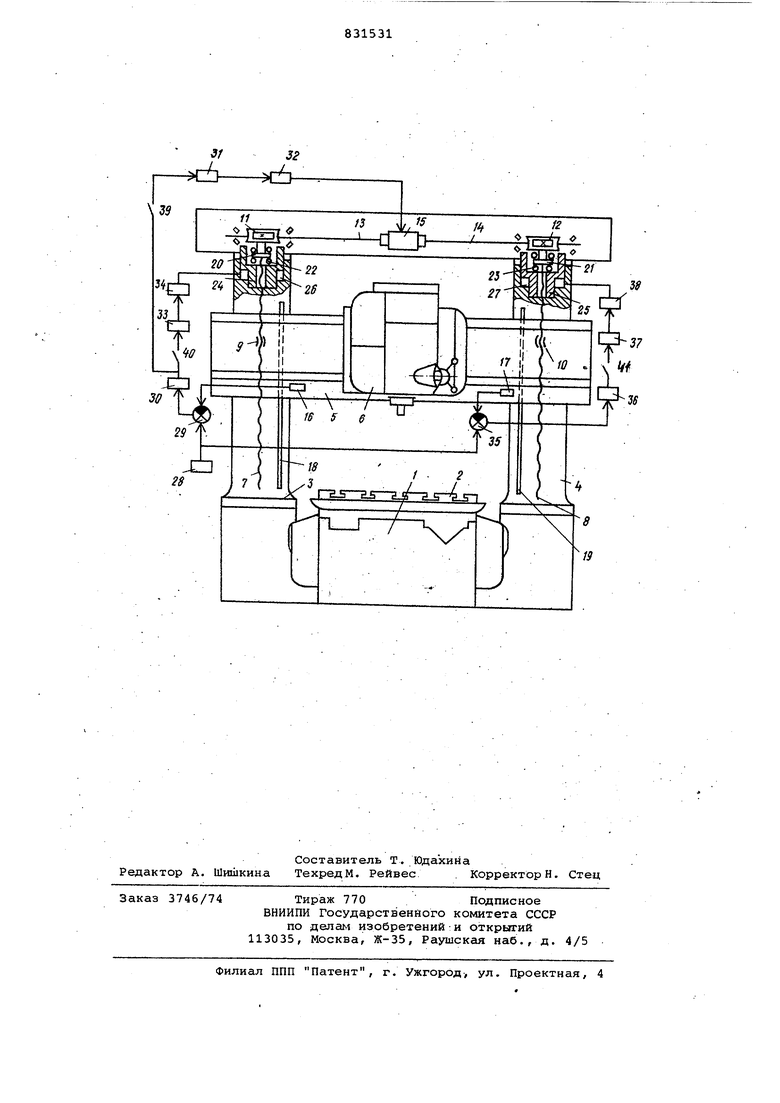
Изобретение относится к станкостроению. Известно устройство для автоматического позиционирования поперечины, содержащее электропривод для перемещения и позиционирования поперечины относительно стоек и систему автомат ческого управления (САУ) двумя гидра лическими исполнительными элементами микроперемещений концов поперечины, предназначенную для- стабилизации вза имного параллельного положения поперечины и стола. При этом исполнитель ные элементы выполнены в виде гидроопор, а управление обеими гидроопорами осуществляется от одного управляемого силового преобразователя, включеннопэ по дифференциальной схеме 1 . . Однако известное устройство имеет недостаточно высокую точность и производительность. Цель изобретения - повышение быстродействия и точности устройства. Ук-азанная цель достигается тем, что в устройство для автоматического позиционирования рабочего оргаьа, например поперечины станка портального типа, содержащее привод быстррго движения рабочего органа и два исполнительных элемента для микроперемещений рабочего органа, дополнительно введен второй блок сравнения, а каждый исполнительный элемент снабжен индивидуальным управляег ым силовым преобразователем, при этом блок ввода задания связан с неиг-гвертиругацими входами двух блоков сравнения, к инвертирующим входам которых подключены датчики перемещения рабочего органа, а выходы блоков сравнения соединены со входами соответствующих управляемых силовых преобразователей. На чертеже изображен станок с устройством для автоматического позиционирования рабочего органа, общий вид.-. Станок содержит станину 1, стол 2, стойки 3 и 4,.поперечину 5 и шпиндельную бабку 6. Ходовые винты 7 и 8, взаимодействующие с гайками 9 и 10, предназначены для перемещения поперечины 5 по направляющим стоек 3 и 4, и соединены через червячные едукторы 11 и 12 с валами 13 и 14 электродвигателя 15 постоянного тока. Два прецизионных датчика 16 и 17 линейных перемещений, например ндуктосинные импульсные датчики, встроены в левом и правом концах полеречины 5, а соответствующие этим датчикам шкалы 18. и 19 отсчета монтируются на стойках 3 и 4 параллельно осям ходовых винтов 7 и 8. Для обеспечениявозможности вертикального перемещения ходовых винтов 7 и 8 (без их поворота) вместе с закрепленной на них поперечиной 5, базовые торцы .20 и 21 ходовых винтов 7 и 8 через упорные подшипники 22 и 23 установлены в корпусах 24 и 25, под которыми размещены гидроопоры 26 и 27. Устройство для автоматического позиционирования рабочего органа состоит из двух систем: САУ электропри водом движения поперечины 5 и САУ исполнительными элементами микроперемещений - гидроопорами 26 и 27. САУ электроприводом движения поперечины 5 включает в себя блок 28 ввода задания, например цифровое программозадакщее устройство унифицированной блочной системы регулирования дискретного типа УБСР-Д, датчи 16 перемещения левого конца поперечи ны 5 относительно шкалы 18 отсчета, блок 29 сравнения, например, выполн ный на элементах той же серии, цифро аналоговый преобразователь 30, например преобразователь кода с учетом его знака всоответствукадее напряжение, усилитель 31, тиристорный преобразователь 32 и,электродвигатель 1 САУ гидроопорами 26 и 27 выполнена- двухканальной. При этом один из каналов (условно первый) содержит блок 28 ввода задания, датчик 16 перемещения левого конца поперечины 5 относительно шкалы 18 отсчета, блок 29 сравнения; цифроаналоговый преобр зователь 30, усилитель 33, управляемый силовой преобразователь 34, на.пример электрогидропреобразов.атель типа сопло-заслонка, и гидроопору 26 другой канал управления (условно вто рой) содержит блок 28 ввода задания. датчик 17Перемещения правого конца поперечины 5 относительно шкалы. 19 отсчета, блок 35 сравнения, цифро аналоговый преобразователь 36, усили тель 37, управляемый силовой преобра зователь 38, например электрогидропреобразователь типа сопло-заслонка и гидроопору 27. Контактные выключатели 39-41 пред назначены для согласования работы САУ электроприводом движения прпере чины 5 и САУ гидроопорами 26 и 27 в различных режимах. Устройство работает следующим об разом. Предварительно, при наладке стан ка, согласовывается положение нулевых точек отсчета на шкалах 18 и 19 таким образом, что они лежат в плос кости зеркала стола 2. При этом обе печение равенства координат положеНИИ левого и правого концов поперечины 5 относительно соответствующих кал 18 и 19 означает и обеспечение параллельности поперечины 5 и зеркала стола 2. Одновременно устанавливается гидравлический ноль электрогидропреобразователей 34 и 38 таким образом, что при -нулевом управляющем сигнале на входах электрогидропреобразователей 34 и 38 давление в гидроопорах 26 и 27 одинаково и равно половине максимально допустимого давления. Тем самым достигается возможность изменения давления в гидроопорах 26 и 27 в процессе работы устройства как в сторону увеличения, так и в сторону уменьшения. При необходимости перемещения поперечины 5 из одной позиций в другую контактный выключатель 39 замыкается а контактные выключатели 40 и 41 размыкаются. Требуемая координата положения концов прперечины 5 относительно шкал 18 и 19 задается с помощью блока 28 ввода задания, а фактическое положение поперечины 5 контролируется посредством одного из датчиков перемещения, например датчика 16. При наличии расхождения между . заданным и фактическим положением поперечины 5 на выходе блока 29 сравнения появляется разностный сигнал, который с помощью цифроаналогового преобразователя 30 преобразуется из цифровой формы в напряжение. Последнее усиливается в усилителе 31 и тиГ-. ристорном преобразователе 32 и подается на электродвигатель 15, а он с максимально допустимой скоростью сообщает вращение через валы 13 и 14 и редукторы 11 и 12 ходовым винтам 7 и 8, которые, вращаясь, поднимают или опускают поперечину 5 до тех пор, пока на выходе блока 29 срав нения не станет равным нулю. После этого выключатель 39 размыкается , авыключатели 40 и 41 замыкаются. .Необходимость включения САУ гидроопорами 26 и, 27 вызывается тем, что после отключения системы управления электроприводом движения поперечины 5 фактическое положение г следней не совпадает с требуемым. Причина ней не совпадает с требуемым. Причина указанного расхождения заключается в том, что положение поперечины 5 контролируется лишь по положению ее i левого конца с помощью датчика 16, в то время как положение ее правого конца не контролируется и отличается от положения левого конца эа счет погрешностей изготовления элементов кинематической цепи привода поперечины 5, из-за различия упругих деформаций ходовых винтов- 7 и 8, вызванных перераспределением нагрузки на Hitx при перемещении шпиндельной бабки 6 по поперечине Бит. п. Кроме того, после отключения САУ элект 5 роприводом поперечины 5 возможен выбег последней под действием сил инерции, что также ведет к отклонени фактического положения поперечины 5 от заданного. Возникаквдее при этом рассогласование компенсируется двухканальной САУ гидроопорами 26 и 27. . в первом канале сигналы с блока 28 ввода задания и датчика 16 поступают . в блок 29 сравнения, на выходе последнего возникает разностный сигнс1л, который посредством цифроаналогового преобразователя -30 преобразуется из цифровой фор1«и в напряжение и после усиления в усилителе 33 пост пает на элактрогидропреобразователь 34. Последний изменяет давление в гидроопоре 26, за счет чего поднимается или опускается корпус 24, а вме сте с ним и ходовой винт 7 до тек пор, пока сигнал на выходе блока 29 сравнения не станет равным нулю. Одновременно во втором канале сигналы .с блока 28 ввода задания и датчика 17 поступают в блок 35 сравнения, на выходепоследнего возникает разностный сигнал, который посредством цифроаналогового преобразователя 36 преобразуется из цифровой формы в напряжение, и после усиления в усилителе 37 поступает на электрогидропреобразователь 38. Последний изменяет давление в гидрропоре 27, за счет чего поднимается или опускается корпус 25, а вместе с ним и ходовой винт 8 до тех пор, пока сигнал на выходе блрка 35 сравнения не станет равным нулю. Таким образом, .за счет перемещения поперечины 5 в заданную координа ту с максимально допустимой скорость и последующей компенсацией перекоса поперечины 5 относительно стола 2с одновременным позиционирова.нием пЬпе речины 5 относительно шкал 18 и 19 отсчета повышается быстродействие и достигается высокая точность позиционирования поперечима 5; Кроме того,- предусмотрена возможность обработки деталей, например сверлением, за счет перемещения попе речины 5 по стойкам 3 и 4. При этом выключатели 39 и 41 замкнуты., а выключатель 40 разомкнут. Требуемая программа движения поперечины 5 зада ется блоком 28 ввода задания и отрабатывается системой управления электроприводом поперечины 5.. При этом кон троль за движением поперечины 5 осу.ществляется по положению ее левого конца с помощью датчика 16. Если, в силу действия упомянутых ранее возмучений, характер движения правого конца Поперечины 5 отличается от предписанного блоком 28 ввода задания, то коррекция движения правого конца поперечины 5 осуществляется посредством САУ гидроопоррй 27,. Таким образом, за счет совместного функционирования САУ электроприводом поперечины, сообщающей перемещение поперечине 5, и САУ гидроопорой 27, корректирующей движение правого кон- , да поперечины 5, достигается синхронизация движений обоих концов поперечины 5 при обработке деташей, например, с верлением. При этом отпадает необходимость перемещения пиноли, вылет шпинделяне изменяется, а погрешности , вносимые радиальным биением шпинделя, остаются постоянньили и минимальными в течение всего процесса обработки. Введение предлагаемого реж-има также способствует повышению точности устройства для автоматического позиционирования рабочего органа, . . Формула изобретения . Устройство дляавтоматического позиционирования рабочего органа, например поперечины станка пор тального типа, содержащее блок ввода задания, привод быстрого движения рабочего органа, два исполнительных элемента шкроперемещений рабочего органа, два датчика перемещения рабочего органа и блок сравнения, о тли ч ающе.ес я тем, что, с целью повьшения быстродействия и точности устройства, в него введен вто-. рой влок сравнения, а каждый исполнительный элемент снабжен индивиду- , альным управляемым силовым преобразователем, при этом блок ввода задания связан с неинвертирующими входами двух блоков сравнения, к инвертирукядим входам которых подключены датчики перемещения рабочего органа, а . выхода блоков сравнения соединены со входами соответствующих управляелмх иловых преобразователей. Источники информации, ринятые во внимание при элспертизе 1. Авторское свидетельство СССР 557883, кл. В 23 D 7/04, 1974. г-is
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU738786A1 |
| Устройство для синхронного перемещения рабочего органа станка | 1985 |
|
SU1294570A1 |
| Устройство для автоматического позиционирования узла станка портального типа | 1984 |
|
SU1242337A1 |
| Устройство для автоматическогопОзициОНиРОВАНия пОпЕРЕчиНы | 1979 |
|
SU810441A1 |
| ТОЛЩИНОМЕР | 1997 |
|
RU2143098C1 |
| Станок портального типа | 1983 |
|
SU1189658A1 |
| Фрезерный станок | 1984 |
|
SU1225707A1 |