: .; л ,
Изобретение относится к машино- строительной промьшшейностИ и может быть использованр в станкостроении, особенно в прецизионном, например в координатно-растрчных, координатно шлифовальных станках, координатн(-иэмерительных машинах .портального типа.
Известно устройство для автоматического позиционирования поперечины, например в станках портального типа, предназначенное для обеспечения параллельности поперечины и ствола, содержашее датчик положения шпиндельной бабки на поперечине, усилительно-преобразовательные элементы И силовые исполнительные механизмьг, воздействующие на ходовые винты поперечины 1.
Однако это устройство обладает зна чительным недостатком, так как при позиционировании поперечины относатель но стола оно решает задачу компенсации перекоса поперечины с учетом лишь одного из конкретных факторов, влияющих на перекос - деформации ходовых.
ВИНТОВ при перемещении шпиндельной бабки по поперечине, но при этом не компенсируется влияние других существенных возмущений: износа подшипников, неидентичности хоДовых винтов и гаек, погрешностей изготовления элементов кинематической цепи привода поперечины и др.
Известно устройство для автоматичеС кого позиционирования поперечины меtoталлорежущего станка, содержащее систему автоматического управления движением ходовых винтов поперечины, синхронизированным посредством электрической связи, и две шкалы отсчета поISложений Кондов поперечины, установленные на стойках.
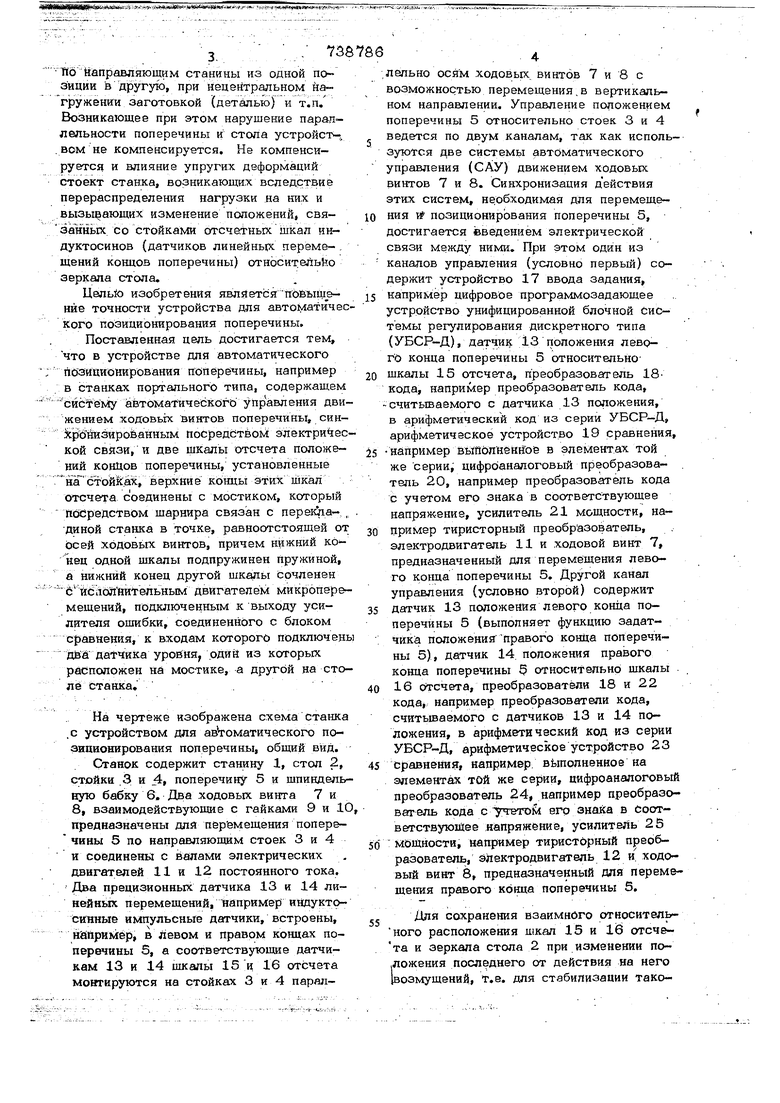
Однако в этом устройстве испопь;зуе. мая система отсчета положения поперечины не связана непосредственно со сто20лом, который в процессе эксплуатации станка изменяет свое положение относительно горизонтали, например в результате перевалки при перемещении 3, .- S Пойаправляющим станины из одной по- зиции в другую, при нецентральном йагр|уж;ении заготовкой (детйлью) и т.п. Возникающее при этом нарушение параллельности поперечины и стола устройст-. . вом не компенсируется. Не компенсиру ется и влияние упругих деформаций стоект станка, возникающих вследствие перераспределения нагрузки на них и вызывающих изменение положений, связанных со стойками отсче ных шкал индуктосинов (датчиков линейньрс переме- , щений концов поперечины) относительно зеркала стола. Цельно изобретения является Повышение точности устройства для автоматиче Кого позиционирования поперечины, Поставленная цель достигается тем, что в устройстве для автоматического гкззйционирования поперечины, например в станках портального типа, содержащем систему автоматического управления дви жением ходовь1Х винтов поперечинь, синkp6ййзйроёанным посредЬтбоМ электричес кой связи, и две шкалы отсчета поломеНИИ концов поперечины, установленные н а стойлах, верхние концы этих шкал отсчета соединены с мостиком, который посредством щарнира связан с nepeicha-, диной станка в точке, равноотстоящей от Осей ходовых винтов, причем нижний конец одной щкалы подпружинен пружиной, а нижний конец другой шкалы сочленен 6 йбаЬлнительным двигателем микропере мещений, подключенным к выходу усилителя ошибки, соединенного с блоком сравнения, к входам которого подключен дьа датчика уровня, рдий из которых расположен на мостике, а другой на сто ле станка,. На чертеже изображена схема станка с устройством для ав гоматического позиционирования поперечины, общий вид. Станок содержит станину 1, стол 2, стМки ,3 и 4, поперечину 5 и шпиндель ную бабку 6. Два ходовых винта 7 и 8, взаимодействующие с гайками 9 и 1 предназначены дли перемещения поперечины 5 по направляющим стоек 3 и 4 и со1эдинены с ёалами электрических двигателей 11 и 12 постоянного тока. Два прецизионных датчика 13 и 14 линейных перемещений, например индуктоСинные импульсные датчики, встроены, например, в левом и правом концах поперечины 5, а соответствующие датчикам 13 и 14 шкалы 15 и 16 отсчета монтируются на стойках 3 и 4 параллельно осям ходовых, винтов 7 и 8 с возможностью перемещения,в вертикальном направлении. Управление положением поперечины 5 относительно стоек 3 и 4 ведется по двум каналам, так как используются две системы автоматического управления (САУ) движением ходовых винтов 7 и 8. Синхронизация действия этих систем, необходимая для перемещения и позиционирования поперечины 5, достигается (введением электрической связи между ними. При этом один из каналов управления (условно первый) содержит устройство 17 ввода задания, например цифровое программозадающее устройство унифицированной блочной Системы регулирования дискретного типа (УБСР-Д), датчи 13 положения левого конца поперечины 5 относительно щкалы 15 отсчета, преобразователь 18кода, например преобразователь кода, считьгоаемого с датчика 13 положения, в арифметический код из серии УБСР-Д, арифметическое устройство 19 сравнения, например выПОпнек1Гое в элементах той же серии, цифрОаналоговый преобразова- . тель 20, например преобразователь кода с учетом его знака в соответствующее напряж-ение, усилитель 21 мощности, например тиристорный преобразователь, электродвигатель 11 и ходовой винт 7, предназначенный для перемещения левого конца поперечины 5. Другой канал управления (условно второй) содержит датчик 13 положения левого конца поперечины 5 (выполняет функцию задатчика положения правого конца поперечины 5), датчик 14. положения правого конца поперечины 5 относительно шкалы 16 Отсчета, преобразователи 18 и 22 кода, например преобразователи кода, считываемого с датчиков 13 и 14 положения, в арифметический код из серии УБСР-Д, арифметическое устройство 23 сравнения, например, выполненное на элементах той же серии, цифроаналоговый преобразователь 24, например преобразователь кода с уч;втоМ его знайа в соответствующее напряжение, усилитель 25 : мощности, например тиристорный преобразователь, электродвигатель 12 и. ходовый винт 8, предназначенный для перемещения правого конца поперечины 5. Для сохранения взаимного относительного расположения шкал 15 и 16 отсчета и зеркала стола 2 при изменении положения последнего от действия на него возмущений, т.е. для стабилизации такого положения нулевых точек отсчета шк 15 и 16, при которых расстояния от ни до плоскости стопа 2 равны между собой, предусмотрена возможность управл ния положением подвижных шкал 15 .и 1 относительно стопа 2. С этой целью вер ние концы шкал 15 и 16 соединены с мостиком 26, который посредством шар нира 27 связан с перекладиной 28 ста Ка в точке, равноотстоящей от осей ходовых винтов 7 и 8. Нижний конец одн из цодвижных шкал, например шкалы 16 сочленяется с исполнительным двигателем 29 микроперемещений, например магнитострикционным, а нижний конец другой шкалы 15 подпружинен пружиной 30. На мостике 26 установлен датчик 31 уровня, например маятникового типа измеряюш;ий отклонение мостика 26 от горизонтали. Другой такой же датчик .32 урЬвня, измеряющий схгклонение от горизонтали зеркала стопа 2, расположен в корпусе стола 2. При этом САУ положением подвижньгх шкап 15 и 16 включает в себя датчики 31 к 32 уро&, ня, блок 33 сравнения, усилитель 34 ошибки, например операционный усилитель, и исполнительный двигатель 34 ошибки, например операцион 1ьа} усилител и исполнительный двигатель 29 микроперемещений, предназначенный дпя управ ления подвижными шкалами 15 и 16. Устройство работает следующим обра зом. Предварительно при наладке станка согласов ьюается положение нулевых точек отсчета шкал 15 и 16 таким образом, чтобы расстояния от них до плоскости стола 2 были равны между собой. При этом обеспечение равенства координат положений левого и правого концов поперечины 5 относит ельно соответствующих шкал 15 и 16 одновременно означает и обеспечение параллельности поперечины 5 и зеркала стола 2. Далее, при установочных перемещениях поперечины 5 из одной позиции в другую, а также при обработке заготовок посредством подъема или опускания поперечины 5 по стойкам 3 и 4 (последнее имеет место в станках портального типа с беспинольной шпиндельной . головкой), программа требуемого движения поперечины 5 задается с помощью устройства 17 ввода задания, а фактическое положение поперечины 5 (с учетом влияния на него возмущающих воздействий - упругих деформаций ходовых винтов 7 и 8 при изменении нагрузки 6 на них, пoгpeшнocteй изготовления элементов кинематических цепей ходовых БИНТОВ 7 и 8 и T,ru) определяется пока- зания и датчиков 13 и 14 положений концов поперечикы 5, Сигнал с устройства 17 ввода задания поступает на один из входов арифметического устройства 19 сравнания, а сигнал с импульсного датчика 13 положения левого конца поперечины 5, преобразованный в преоб-. разователе 18 кода, поступает на второй вход арифметического устройства 19 сравнйния. При расхождении между заданным к фактическим поло ж ениец левого конца поперечины Б на выходе арифметического устройства 19 сравнения появляется разностный сигнал , Который с помощью цифроаналогового преобразователя 20 преобразуется из цифровой формы в соответствующую ей аналоговую, например в напряжение. Последнее усиливается и преобразуется в усилителе 21 мощности, например в тиристорном преобразова тале. Напряжение с вькода усилителя 21 мощности подается на электродвигатель 11, а он сообщает вращение ходовому винту 7, который, поворачиваясь, поднимает или опускает левый конец поперечины 5 до тех пор, пока сигнал на выходе арифметического устройства 19 сравнения не станет равным нузтю. Одновременно сигнал с импульсного датчика 12 положения левого конца поперечины 5, преобразованный в преобразователе 18 кода, поступает йа один из входов арифметического устройства 23 сравнения, а на второй его вход поступает сигнал с импульсного датчика 14 положения правого ко1ща поперечины 5, преобразованный в преобразователе 22 кода. Если эти сигналы различны, то на вькоде арифметического устройства 23 срав- нения появляется разностный сигнал, который с помощь) цифроаналоГового преобразователя 24 преобразуется из цифровой формы в соответствующую ей aнaлoгoвyюJ например в напряжение. Поледнее усиливается и преобразуется в силителе 25 мощности, например в тиисторном преобразователе. Напряжение выхода усилителя 25 мощности подает я на электродвигатель 12, а он сообает вращение ходовому винту 8, котоый, поворачиваясь, поднимает или опусает правый конец поперечины 5 до тах ор, пока сигнал на вькоде арифметичесого устройства 23 сравнения не станет авным нулю. Синхронизация действия
CHTdfeKi автоматического управления движением ходОвых винтов 7 и 8 достигается введением электрической связи между ними. В аанндм ЬЙу ае связь между системами осуществляется побрэдством датчика 13 положения левого конца поперечины 5, который является элё1 ентом, принадлежащим одновременно обоим каналам управления. В первом канале он выполняет функцию датчика обратной
связи, измеряющего псшожение левого Конца поперечины 5, а во втором канале функцию задатчика положения правого
конца поперечины 5.
В результате перевалки стола 2 при его перемещении по направляющим станины 1 из одной позиции в другую, а также При нецентральном нагружении стола 2 заготовкой (деталью) изменяется его положение относительно горизонтали, и при сохранении равенства коордййат П1элож:ения левого и правого концов поперечины S относительно соответствующих щкал 15 и 16 не обеспечивается параллельность поперечины 5 и зеркала стопа 2. Для компенсаций возникающего угла рассогласования между поперечиной 5 и зеркалом стола 2 устройство для точного позйци отаровання Поперечины 5 оснащается следящей САУ положением подвижных шкал 15 и 16, которая рабсхгаёт следующим
. образом.
При отклонении стола 2 от первоначальног о полоясения показаШя датчиков 31 и 32 уровня становятся различными, и на вьгходе блока 33 сравнения возникает разностньхй сигнал, который после усиления в усилителе 34 ошибки Поступает на исполнительный двигатель 29 микропер«мещений. Последний воздействует на шкалу 16 отсчета, котор, перемещаясь в вертикальном направлении (вверх или вниз), сообщает через мостик 26 перемещения (вниз или вверх), другой шкале 15 «этсчета. При этомугловое перемещейие Мостик 26 относительно щарнира 27 происходи до пор, пока сигнал на выходе устройства 33 сравнения не станет равн нулю, т.е. пока расстояния от нулевых точек 01 счета шкал 15 и 16 до плоскости стола 2 не CTaiqrT равным межд
собой. После того, как подвижные шкалы 15 и 16 будут установлены в новое положение, соответствующее измененному по сравнению с первоначальным положению стола 2, возникнет рассогласование между заданным от устройства 17 ввода задания положением поперечины 5 и фактическим положением ее койцов относительно соответствующих шкал 15 и 16 отсчета. Тогда в действЬе вступают системы автоматического управления движением ходовых винтов 7 и 8, компенсирующие указанное рассогласование, причем процесс позиционирования поперечины 5 относительно шкал 15 и 16 полностью аналогичен описанному. Таким образом, обеспечивается параллельность поперечины 5 и зеркала стола 2.
о р м у л а изобретения
Ф
Устройство дая автоматического позидиоНирЬвашя поперечины, например в Ьтанках порталь а6го типа, содержащее систему автсгматического управления дйижениейxoaoBibix винтов поперечины, сййхроннзтарс айвьгм поср едйтвом электрической связи, и две шкалы отсчета положений концов поперечины, установленные на стойках, о т л и ч а ю щ е ее я тем, ,чт6, с целью повьпцения точности устройства, верхние концы Щкал отсчета соединены с мостиком, который посредством щарнира связан с перекладиной станка в точке, равноотстоящей от осей ходовых винтов, причем нижний конец одной шкаль подпружинен пружиной, а нижний конец другой шкалы сочленен с исполнительным двигателем микрбперемещений, подключённым к выходу усилителя ощйбки, соединенного с блоком сравнения, к входам которого подключены . Два Датчика уровня, один из которьгх расположен ца мостике, а .йругой на столе станка.
л,
Источники информации, принятые во внимание при экспертизе
1. Патент ФРГ № 316225, кл. 49 О 39/00, опублик. 1966.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования поперечины | 1978 |
|
SU747695A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU931385A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Устройство для синхронного перемещения рабочего органа станка | 1985 |
|
SU1294570A1 |
| Устройство для автоматического позиционирования узла станка портального типа | 1984 |
|
SU1242337A1 |
| Устройство для автоматическогопОзициОНиРОВАНия пОпЕРЕчиНы | 1979 |
|
SU810441A1 |
| Станок портального типа | 1983 |
|
SU1189658A1 |
| Станок портального типа | 1982 |
|
SU1060418A1 |
| СТАНОК ПОРТАЛЬНОГО ТИПА С УСТРОЙСТВОМАВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ УПРУГИХПЕРЕМЕЩЕНИЙ | 1972 |
|
SU427832A1 |

