1
1294603
Изобретение относится к робототехнике, в частности к захватным устройствам манипуляторов для работы с хрупкими деталями.
Цель изобретения - уменьшение га- баритов и расширение технологических возможностей устройства путем обеспечения захвата группы хрупких деталей установленных с минимальным зазором между собой.
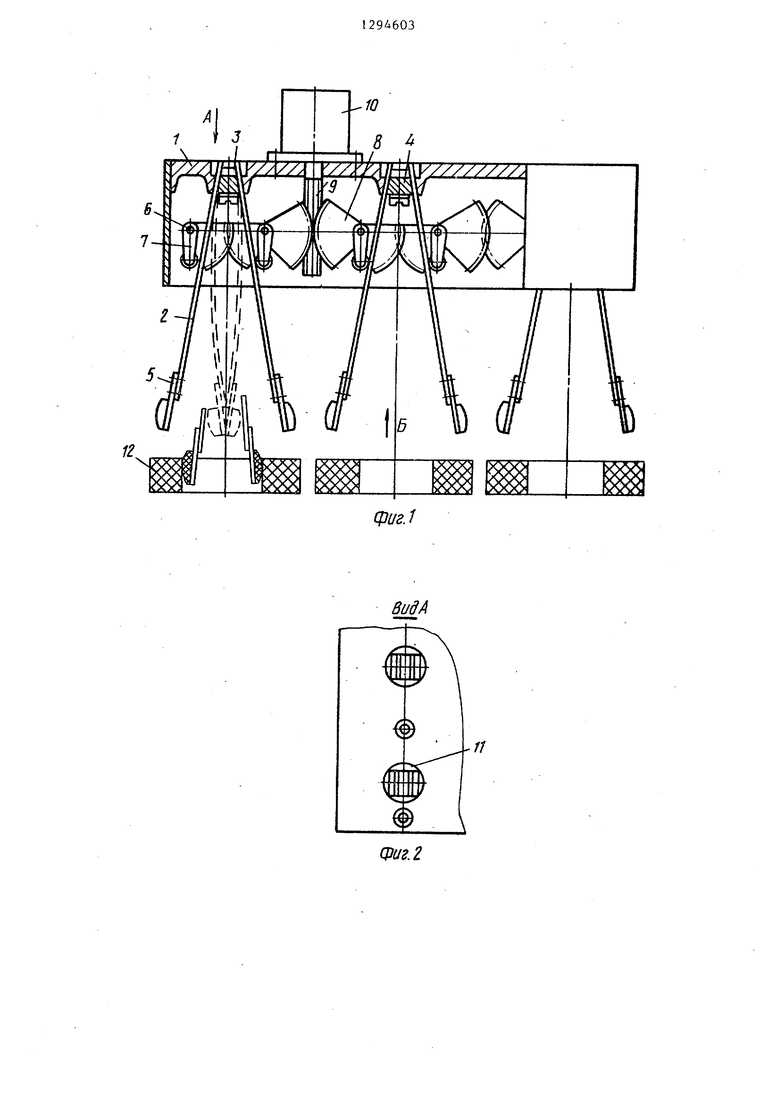
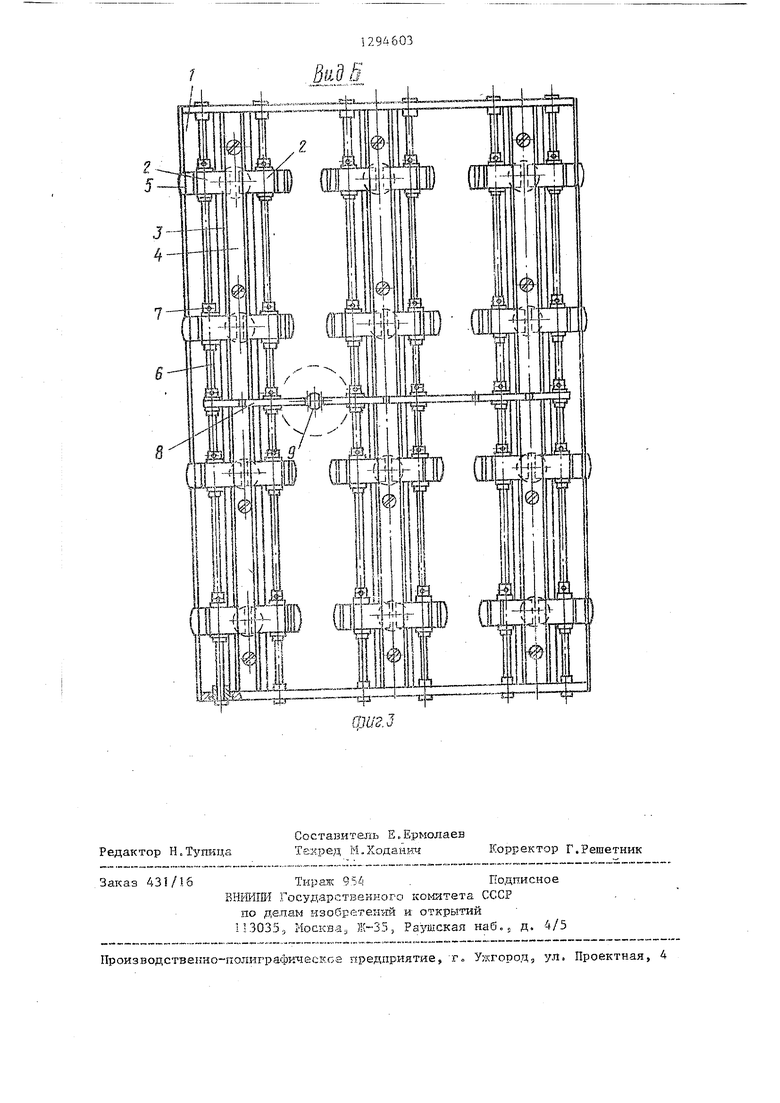
На фиг,1 изображено многозахватное устройство, общий вид; на фиг.2- вид А на .фиг. 1; на фиг. 3 - вид В на. фиг.1,
Многозахватное устройство содер- жит корпус 1, упругие зажимные элементы, выполненные в виде плоских пружин 2, попарно закрепленные в трапециевидных канавках 3 во внутренней части корпуса 1 зажимными призмати- ческими планками 4.
На свободных концах плоских пружин 2 размещены зажимные губки 5. В боковых стенках корпуса 1 установлены попарно валики 6 с кулачками 7, взаимодействующие с пружинами 2 и зубчатыми секторами 8, кинематически связанными со штоком-рейкой 9 пневмопривода 10, расположенного на корпусе 1. На наружной части корпуса в местах крепления пружин 2 выполне нь1 цилиндрические расточки 11 , сообщающиеся с трапециевидными канавками 3.
Многозахватное устройство работа- ет следующим образом.
Перед зажимом деталей 12 пневмопривод 10 через шток-рейку 9 передает вращение вапикам 6 через зубчатые сектора 8, кулачки 7 деформируют плоские пружины 2. После этого зажимные губки вводятся в отверстия деталей 12. Пневмопривод 10 отключается.
подпружиненная шток-рейка 9, валики 6 и кулачки 7 принимают исходное положение, плоские пр жины 2 распрямляются, зажимают детали 12 и удерживают их. При включении пневмопривода 10 кулачки 7 вновь деформируют плоские пружины 2 и происходит освобождение деталей.
Регулировка рабочей длины пружины, а следовательно, и усилия захвата деталей, производится посредством призматических планок А.
Формула изобретения
1.Многозахватное устройство, содержащее корпус с установленными на нем порядно захватами, выполненными с упругими зажимными элементами, и привод их перемещения, включающий в себя силовой цилиндр, отличающееся тем, что, с целью уменьшения габаритов и расширения технологических возможностей, привод вьтол- нен в виде пар валиков по числу рядов захватов с закрепленными на этих валиках кулачками, установленными с возможностью взаимодействия с зажимными элементами, выполненными в виде плоских пружин, закрепленных на корпусе с возможностью регулировки их положения по длине, при этом валики кинематически связаны с силовым цилиндром и между собой посредством смонтированных на них зубчатых секторов.
2.Устройство ПОП.1, отличающееся тем, что плоские пружины размещены в трапециевидных канавках, выполненных в корпусе, и закреплены в нем посредством призматических планок.
CpU8.f
фиг. 2
Редактор Н.Тупица
Составитель Е.Ермолаев
Текред М.Ходанит Корректор Г.Решетник
Заказ 431/1.6
Тираж 954 . Подписное ВНгШГШ Государственного комитета СССР по делам изобретений и открытий 1130355 Москва Ж-35, Раушская наб.. д. 4/5
Производственно-полиграфкческоа предприятие, г Ужгоро.ц, ул. Проектная, 4
COL/SJ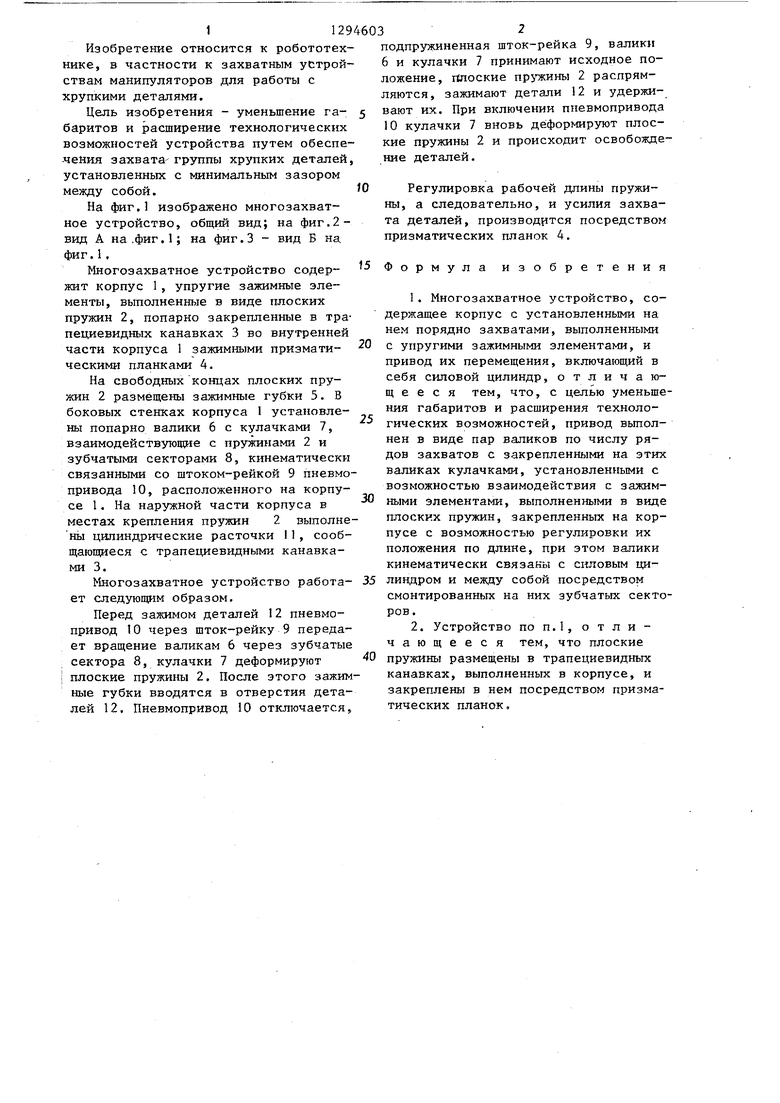
| название | год | авторы | номер документа |
|---|---|---|---|
| Многозахватное устройство | 1986 |
|
SU1390148A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ИЗДЕЛИЙ ИЗ ПРОВОЛОКИ | 2008 |
|
RU2365457C1 |
| Манипулирующее устройство | 1974 |
|
SU510363A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
Изобретение относится к области робототехкики в частности к захватным устройствам манипуляторов для работы с хрупкими деталями. Цель изобретения - уменьшение габаритов и расширение технологических возможностей за счет обеспечения захвата группы хрупких деталей, установленных с минимальным зазором между собой. Цель . достигается тем, что упругие элементы многозахватнога устройства выполнены в виде плоских пружин, кон- Щ)1 которых закреплены попарно в корпусе с помощью призматических планок, а на других концах выполнены зажимные губки. Упругие элементы деформируются от кулачков, установленных на поворотных валиках, связанных с пневмоприводом. Рабочая длина пружин и усилие захвата регулируются посредством призматических плаиок.1 з.п. ф-лы, 3 ил. o со 4 С5 О САЭ
| КОЛЕСО С РЕГУЛИРУЕМОЙ ДЛИНОЙ КОНТАКТА С ГРУНТОМ | 2001 |
|
RU2204489C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
