Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов.
Целью изобретения является расширение технологических возможностей путем обеспечения постоянства положения центра захватываемых деталей без перенастройки захвата.
На чертеже схематически показано захватное устройство.
Захватное устройство содержит корпус 1, в котором смонтирован цилиндр привода 2. В корпусе 1 установлены с возможностью поворота поводки 3 на осях 4 и кривошипы 5 на осях 6. Кривошипы 5 имеют зубчатый сектор для взаимодействия со штоком-рейкой 7 и образуют вращательную пару через шарниры 8 с захватными рычагами 9, несущими на одних своих концах жестко установленные призматические губки 10, а на вто рых концах выполнены пазы 11, продольные оси которых совпадают с осями захватных рычагов 9. Пазы 11 имеют возможность взаимодействовать с поводками 3. При этом оси 4 поводков 3 с центром 12 захватываемой детали 13 лежат на дугах окружностей, описываемых соответствующими шарнирами 8. Центром указанных дуг являются оси 6 поворота кривошипов 5. Кроме того, угол, образованный продольной осью паза 11 и осью симметрии приз.матической губки 10, меньше 180° на величину, равную половину угла, образованного осью 4 (поводка 3), осью 6 (кривошипа 5) и центром 1 1 захватываемой детали 13.
Захватное устройство работает следующим образом.
В исходном i положении шток-рейка 7 находится в выдвинутом положении. Манипулятор подводит захватное устройство к детали 13, при этом в штоковую полость цилиндр 7 втягивается и поворачивает кри- вошипы 5, захватные рычаги 9 сводятся, зажимая деталь 13 призматически.ми губками 10.
Положение оси 12 захватываемой дета-- ли 13 относительно корпуса 1 постоянно и 0 не зависит от положения кривошипов 5, т. е. от диаметра захватываемой детали.
Манипулятор переносит захватное устройство с деталью 13 в позицию выгрузки. В бесштоковую полость цилиндра привода 2 подается сжатый воздух. Шток-рейка 7 выдвигается и поворачивает кривошипы 5. Деталь 13 освобождается.
Формула изобретения
0 Захватное устройство, содержащее корпус, захватные рычаги с призматическими губками, поводки и механизм привода, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено двумя шарнирно связанными с захватными рычагами кривощипами, кинематически связанными с механизмом привода, при этом в каждом захватном рычаге выполнен продольный паз , в котором размещены поводки, причем ос и шарниров, связывающих захватные рычаги с кривощипами, расположены на пересечении продольных осей пазов и осей симметрии призматических губок, кро.ме того, оси шарниров, поводков и точка пересечения осей симметрии призматических губок равноудалены от осей поворота кривошипов.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захват манипулятора | 1977 |
|
SU691290A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Захват | 1977 |
|
SU667396A1 |
| Захват манипулятора | 1977 |
|
SU642150A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
Изобретение относится к области машиностроения, а именно к захватам манипуляторов. Цель изобретения - расширение технологических возможностей за счет обеспечения постоянства положения захватываемых деталей без перенастройки захвата. Захватное устройство содержит корпус 1, в котором смонтирован цилиндр привода 2. / ;/ 3 в корпусе 1 установлены поводки 3 на осях 4 и кривошипы 5 на осях 6. Кривошипы 5 взаимодействуют со штоком-рейкой 7 и образуют вращательную пару через шарниры 8 с зажимными рычагами 9 с призматическими губками 10. В каждом зажимном рычаге 9 выполнен продольный паз 11, причем оси 4 поводков 3 и ось 12 захватываемой детали 13 лежат на дугах окружностей, описываемых шарнирами 8. В исходном положении шток- рейка 7 находится в выдвинутом положении. Манипулятор подводит захват к детали 13, при этом в штоковую полость цилиндра 2 подается энергоноситель, шток-рейка 7 втягивается и поворачивает кривошипы 5, губки 10 сводятся и зажимают деталь 13. 1 ил. (Л 4 СО о ю О5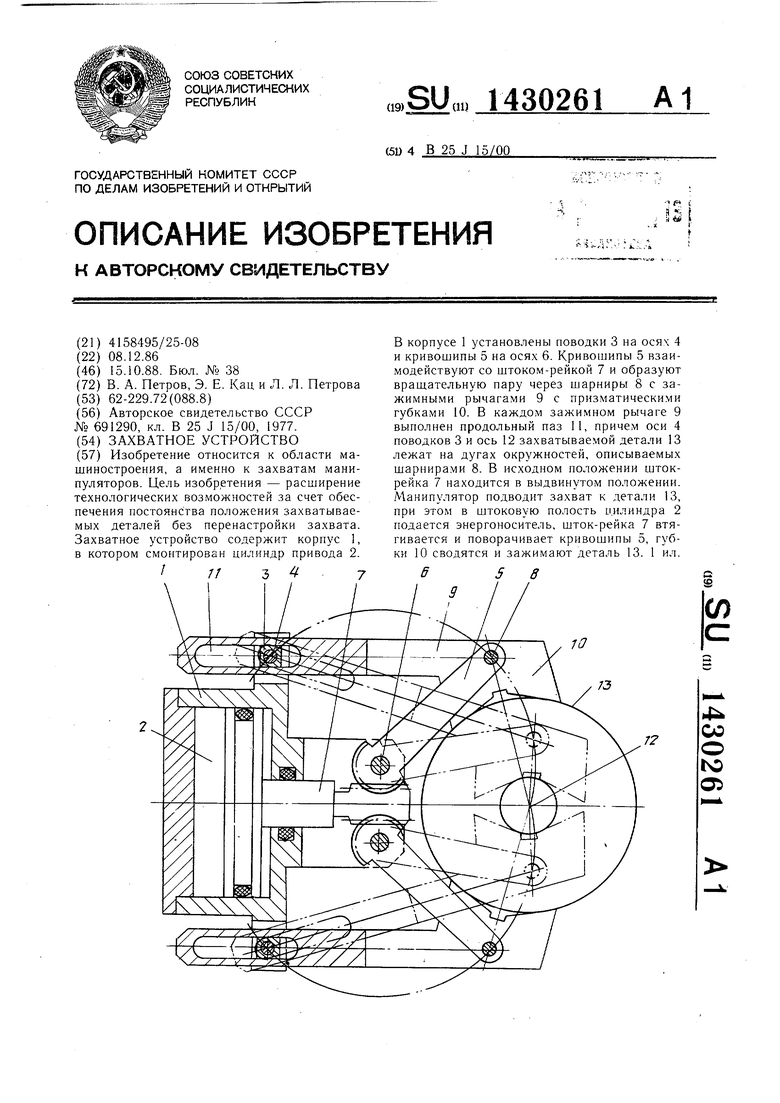
| Захват манипулятора | 1977 |
|
SU691290A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
