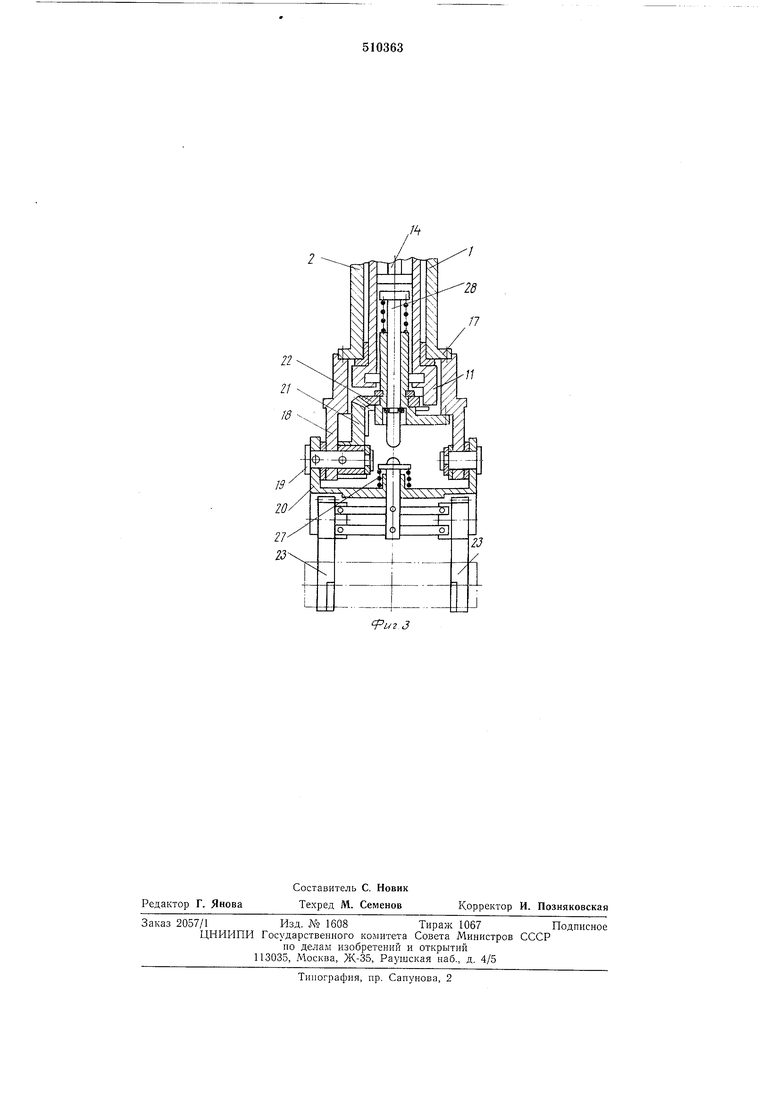
нический зубчатый сектор 21, находящийся i; зацеплении с зубчатым сектором 22, в прорезь последнего входит торцевой зуб 11 шпинделя 2. На качалке располагаются под углом две пары захватов 23 и 24, их губки связаны через реечные передачи 25 и 26 с зажимными пружинами 27 (на фнг. 3 показана только одна пружина). С держателем 18 связан подпружиненный толкатель 28, соосный шпинделю 2.
Манипулирующее устройство может иметь следующие режимы работы: простой с одноместной захватной головкой, в этом случае захват приходит на линию центров станка, захватывает и выводит из кулачков патрона обработанное изделие, переносит его в свободную ячейку тары, захватывает из соседнего гнезда заготовку и загружает ее в станок; с кантованием в конце цикла, цикл аналогичен предыдущему, но перед укладкой в тару обработанная с одной стороны заготовка поворачивается на 180°; с кантованием в станке, в этом случае между полными циклами загрузки предусматривается еще цикл кантования. Когда заготовка обработана с одной стороны,, захват приходит на линию центров станка, захватывает ее, выводит из кулачков патрона, поворачивает на 180° и снова загружает в патрон станка для обработки заготовки с другой стороны; с двухместной захватной головкой, цикл начинается с захвата очередной заготовки, затем захваты меняются местами и пустой захват приходит на линию центров станка, который захватывает обработанное изделие, выводит его из кулачков, после чего захваты снова меняются местами и на линию центров попадает заготовка, находившаяся в первом захвате. Она вводится в патрон, а обработанная деталь переносится в тару. Данный цикл обеспечивает более быструю загрузку станка.
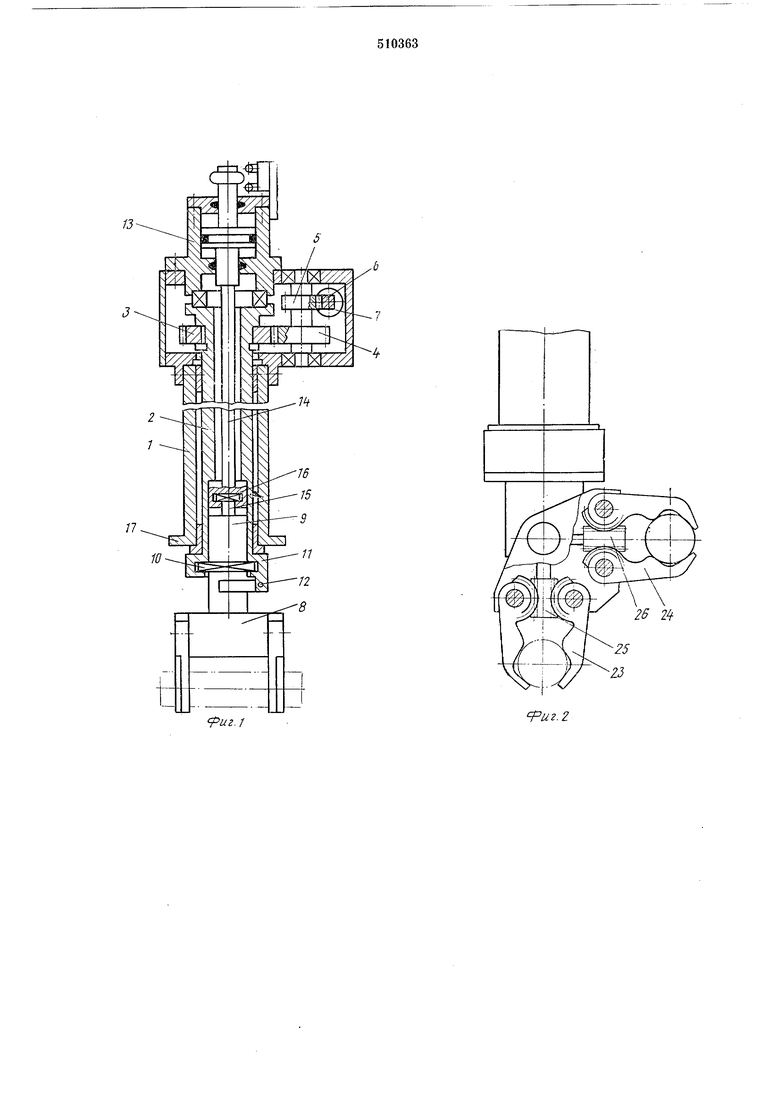
Циклы с одноместной захватной головкой с кантованием в конце цикла и с кантованием в станке применяются преимущественно для тяжелых крунногабаритных деталей. В этих случаях в шпиндель устанавливается одноместная захватная головка, которая связана с толкателем 14 носредством толкателя 15, имеющего цилиндрический хвостовик 9, базируется байонетным замком 10 и зубом Ни ударживается винтом 12. Разжим и зажим губок захвата производится гидроцилиндром 13 через толкатели 14 и 15, которые связаиы между собой также байонетным замком.
В цикле с одноместной захватной головкой цилиндр 7 не включается, и шпиндель 2 остается неподвижным относительно корпуса 1.
510363
В пиклах с кантованием в конце цикла и с кантованием в стайке в моменты, когда требуется кантование детали, цилиндр 7 включается и через шток 6 и зубчатые колеса 5, 4 и 3 поворачивают шпиндель на 180°.
При работе в цикле с двухместной захватной головкой к опорной поверхности фланца 17 корпуса 1 устройства крепится двухместная захватная головка, причем ее торцевой зуб 11 должен входить в прорезь зубчатого сектора 22, один из захватов оказывается на оси шиинделя, а другой располагается под углом к нему. Губки захватов сжимаются пружинами 27. При необходимости разжать губки включается цилиндр 13, толкатель 14 через толкатель 28 перемещает рейку 25, разжимающую губки захвата 23. Разжим производится только у захвата, расположенного в данный момент по оси шпинделя. Губки второго захвата при этом остаются сжатыми за счет пружины. В момент цикла, когда требуется поставить второй захват на место первого, включается цилиндр 7 и шпиндель 2 поворачивается. Расположенный на нем зуб 11 поворачивает зубчатый сектор 22, который через сектор 21 поворачивает качалку 18 на нужный угол.
Формула изобретения
1.Манипулирующее устройство, содержащее корнус с расположенными в нем вращающимся шпинделем, возвратно-поступательно перемещающимся толкателем и захватной головкой, отличающееся тем, что, с целью расширения технологических возможностей, захватная головка выполнена сменной с различным числом пар захватов, а на корпусе, шпинделе и толкателе выполнены базовые поверхности для ее (головки) монтажа, причем для монтажа головки с одной парой захватов служат базовые поверхности Шпинделя и толкателя, а для монтажа головки с несколькими, например, двумя парами захватов служат базовые поверхности шпинделя и корпуса.
2.Манипулирующее устройство по п. 1, отличающееся тем, что базовые поверхности на шпинделе выполнены в виде торцевого зуба и элемента байонетного замка.
3.Манипулирующее устройство по п. 1, отличающееся тем, что базовая поверхность толкателя выполнена в виде элемента байонетного замка.
4.Манипулирующее устройство по п. 1, отличающееся тем, что базовая поверхность корпуса выполнена в виде фланцевой опорной плоскости.
77
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Манипулирующее устройство | 1980 |
|
SU876416A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Манипулирующее устройство | 1978 |
|
SU695810A1 |
| Манипулирующее устройство | 1983 |
|
SU1146194A2 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |