1
Изобретение относится к машиностроению и может быть использовано в составе роботизированных техно- логических комплексов для чистовой обработки деталей из пластмасс после их прессования, формовки.
Цель изобретения - повышение качества и расширение функциональных возможностей.
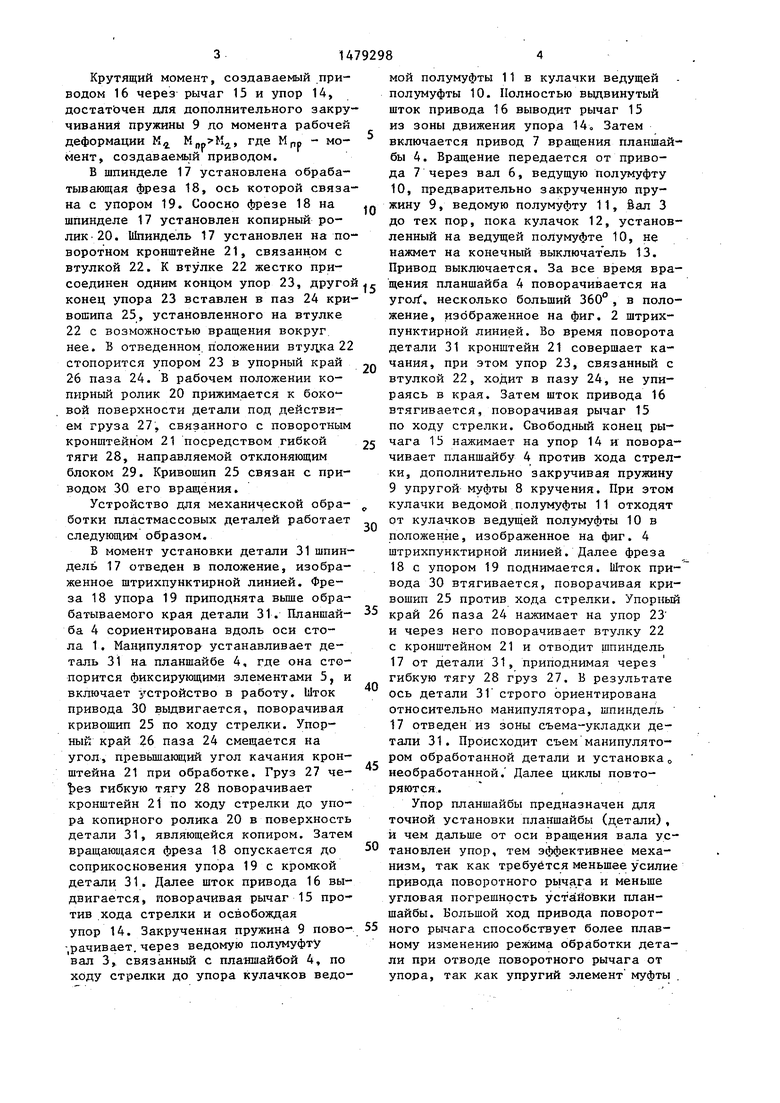
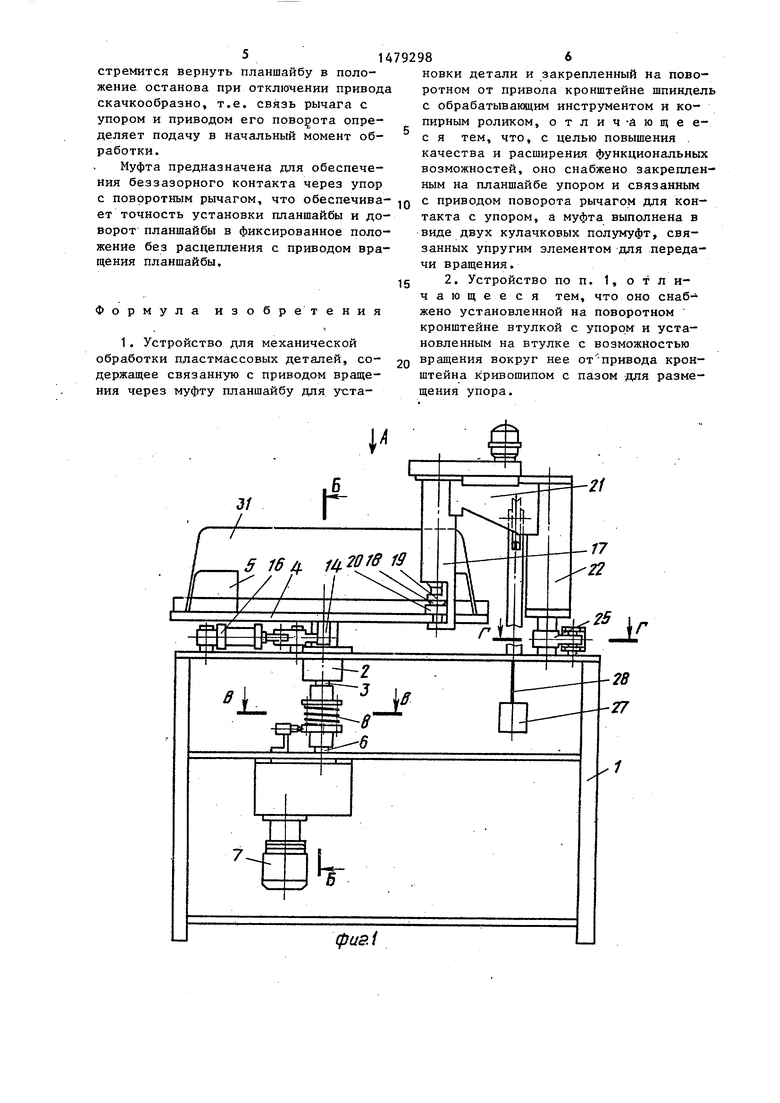
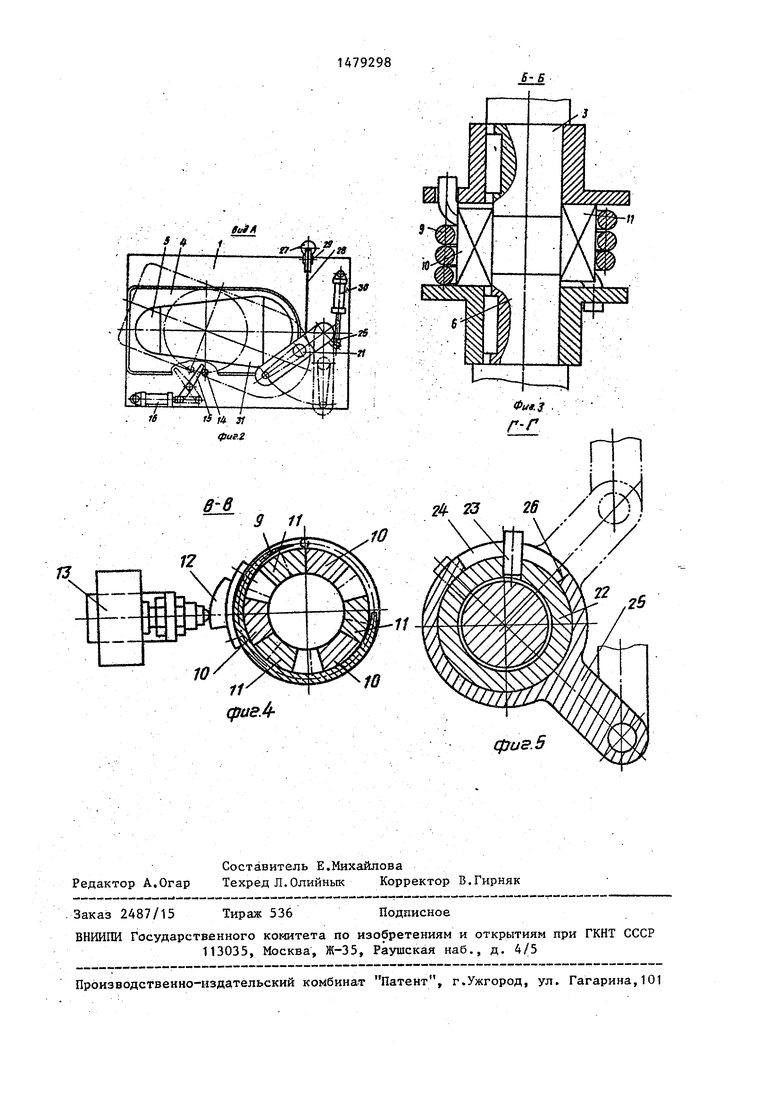
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1.
Устройство для механической обработки пластмассовых изделий содержит стол 1 , на котором в опорах 2 на валу 3 закреплена планшайба 4 с фикси рующими элементами 5 для обрабатываемой детали. Вал 6 привода 7 вращения соединен с валом 2 планшайбы 4 через упругую муфту 8 кручения, содержащую предварительно закр ученную пружину 9 кручения. От раскручивания пружину 9 предотвращают кулачки ведущей полумуфты 10 и кулачки ведомой полумуф- ты 11. На ступице ведущей полумуфты 10 установлен кулачок 12 для взаимодействия с конечным выключателем 13. С планшайбой 4 жестко связан упор 14. На вертикальной оси на столе 1 установлен поворотный рычаг 15, связанный одним концом с приводом 16 его вращения. Момент предварительно закрученной пружины 9 Н4 достаточен для поворота планшайбы при обработке, детали, М,МС, где Мс - момент сопротивления при обработке.
Крутящий момент, создаваемый приводом 16 через рычаг 15 и упор 14, достаточен для дополнительного закручивания пружины 9 до момента рабочей деформации М4 , где МПр - момент, создаваемый приводом.
В шпинделе 17 установлена обрабатывающая фреза 18, ось которой связана с упором 19. Соосно фрезе 18 на шпинделе 17 установлен копирный ролик 20. Шпиндель 17 установлен на поворотном кронштейне 21, связанном с втулкой 22. К втулке 22 жестко присоединен одним концом упор 23, другой конец упора 23 вставлен в паз 24 кривошипа 25, установленного на втулке 22 с возможностью вращения вокруг нее. В отведенном положении 22 стопорится упором 23 в упорный край 26 паза 24. В рабочем положении ко- пнрный ролик 20 прижимается к боковой поверхности детали под действием груза 27, связанного с поворотным кронштейном 21 посредством гибкой тяги 28, направляемой отклоняющим блоком 29. Кривошип 25 связан с приводом 30 его вращения.
Устройство для механической обработки пластмассовых деталей работает следующим образом.
В момент установки детали 31 шпиндель 17 отведен в положение, изображенное штрихпунктирной линией. Фреза 18 упора 19 приподнята выше обрабатываемого края детали 31. Планшайба 4 сориентирована вдоль оси стола 1. Манипулятор устанавливает деталь 31 на планшайбе 4, где она стопорится фиксирующими элементами 5, и включает устройство в работу. Ыток привода 30 выдвигается, поворачивая кривошип 25 по ходу стрелки. Упорный край 26 паза 24 смещается на угол, превышающий угол качания кронштейна 21 при обработке. Груз 27 че- Јез гибкую тягу 28 поворачивает кронштейн 21 по ходу стрелки до упора копирного ролика 20 в поверхность детали 31, являющейся копиром. Затем вращающаяся фреза 18 опускается до соприкосновения упора 19 с кромкой детали 31. Далее шток привода 16 выдвигается, поворачивая рычаг 15 против хода стрелки и освобождая упор 14. Закрученная пружина 9 поворачивает, через ведомую полумуфту вал 3, связанный с планшайбой 4, по ходу стрелки до упора кулачков ведо0
5
0
5
0
5
0
5
0
5
мой полумуфты 11 в кулачки ведущей полумуфты 10. Полностью выдвинутый шток привода 16 выводит рычаг 15 из зоны движения упора 14 Затем включается привод 7 вращения планшайбы 4. Вращение передается от привода 7 через вал 6, ведущую полумуфту 10, предварительно закрученную пружину 9, ведомую полумуфту 11, бал 3 до тех пор, пока кулачок 12, установленный на ведущей полумуфте 10, не нажмет на конечный выключатель 13. Привод выключается. За все время вращения планшайба 4 поворачивается на угол1, несколько больший 360° , в положение, изображенное на фиг. 2 штрих- пунктирной линией. Во время поворота детали 31 кронштейн 21 совершает качания, при этом упор 23, связанный с втулкой 22, ходит в пазу 24, не упираясь в края. Затем шток привода 16 втягивается, поворачивая рычаг 15 по ходу стрелки. Свободный конец рычага 15 нажимает на упор 14 и поворачивает планшайбу 4 против хода стрелки, дополнительно закручивая пружину 9 упругой муфты 8 кручения. При этом кулачки ведомой полумуфты 11 отходят от кулачков ведущей полумуфты 10 в положение, изображенное на фиг. 4 штрихпунктирной линией. Далее фреза 18 с упором 19 поднимается. Шток при- вода 30 втягивается, поворачивая кривошип 25 против хода стрелки. Упорный край 26 паза 24 нажимает на упор 23 и через него поворачивает втулку 22 с кронштейном 21 и отводит шпиндель 17 от детали 31, приподнимая через гибкую тягу 28 груз 27. В результате ось детали 31 строго ориентирована относительно манипулятора, шпиндель 17 отведен из зоны съема-укладки детали 31. Происходит съем манипулятором обработанной детали и установка 0 необработанной. Далее циклы повторяются.
Упор планшайбы предназначен для точной установки планшайбы (детали), и чем дальше от оси вращения вала установлен упор, тем эффективнее механизм, так как требуется меньшее усилие привода поворотного рычага и меньше угловая погрешность установки планшайбы. Большой ход привода поворотного рычага способствует более плавному изменению режима обработки детали при отводе поворотного рычага от упора, так как упругий элемент муфты .
фиэА
И
21
Ф ite.3 .
r-r
rh
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки резьбовых соединений | 1975 |
|
SU568530A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Винтоверт | 1985 |
|
SU1305019A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОВОРАЧИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1973 |
|
SU388332A1 |
| Автомат для сварки кольцевых швов в среде защитных газов | 1974 |
|
SU519294A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОВОРАЧИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1968 |
|
SU221805A1 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| Индексирующий и транспортирующий механизм | 1988 |
|
SU1614752A3 |
| Автоматический штамповочный комплекс для изготовления деталей из полосы и устройство для отделения от стопы полосы и подачи ее в рабочую зону пресса | 1990 |
|
SU1756000A1 |
Изобретение относится к машиностроению и может быть использовано в составе роботизированных технологических комплексов для чистовой обработки деталей из пластмасс. Цель - повышение качества и расширение функциональных возможностей. Для этого устройство снабжено закрепленным на планшайбе упором и связанным с приводом поворота рычагом для контакта с упором. Муфта выполнена в виде двух кулачковых полумуфт, связанных упругим элементом для передачи вращения. Кроме того, оно снабжено установленной на поворотном кронштейне втулкой с упором и установленным на втулке с возможностью вращения вокруг нее от привода кронштейна кривошипом с пазом для размещения упора.1 з.п. ф-лы, 5 ил.
в-в
9 11
Составитель Е.Михайлова Редактор А.Огар Техред Л.Олийнык Корректор В.Гирняк
Заказ 2487/15
Тираж 536
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
2 23 26 / (
Подписное
| Станок для механической обработки пластмассовых деталей | 1980 |
|
SU973381A1 |
| Солесос | 1922 |
|
SU29A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПЛАСТМАССОВЫХДЕТАЛЕЙ | 1979 |
|
SU825319A1 |
| Солесос | 1922 |
|
SU29A1 |
