Изобретение относится к машиностроению, а именно к методам и средствам контроля зубчатых передач.
Цель изобретения - повышение точности и информативности за счет ис- пользования датчиков входного и выходного звеньев с высокой разрешающей способностью.
На чертеже изображена принципиальная схема устройства для реапи- зации способа контроля кинематической погрешности зубчатых передач.
Устройство для реализации способа включает в себя два датчика углов поворота начального и конечного зве- ньев контролируемой передачи, вьтол- ненные в йиде кольцевых оптических квантовых генераторов 1 и 2, один из которых (1) жестко устанавливается на входном звене контролируемой пе- редачи 3, второй (2) устанавливается на выходном звене и имеет ось 4 вращния, расположенную перпендикулярно оси выходного звена передачи 3, блок 5 измерения разности частот, двига- тель 6, расположенный на оси 4, датчик 7 угла поворота квантового генератора 2, расположенный на свободном конце оси 4, регистратор 8, первый вход которого соединен с выходом блока 5 измерения разности частот и входом двигателя 6, второй вход соединен с выходом датчика 7 угла поворота квантового генератора 2, а первый и второй входы блока 5 измерения разности частот связаны соответственно с выходами квантовых генераторов 1 и 2 входного и выходного звеньев контролируемой передачи 3.
Способ осуществляется следующим
образом.
Устанавливают на входном и выходном звеньях контролируемой передачи 3 кольцевые оптические квантовые ге- нераторы 1 и 2, обкатывают контролируемую передачу, по разности частот, поступаюпшх с кольцевых генераторов 1 и 2 угла поворота на блок 5 измерения разности частот, определяют кине- магическую погрешность передачи 3.
Кольцевой генератор выходного звена имеет ось 4 вращения, перпендикулярную оси вращения выходного звена контролируемой передачи 3, устанав- ливают на этой же оси 4 датчик 7 угла поворота кольцевого генератора и двигатель 6, в процессе измерения корректируют положение оси кольцевого
генератора выходного звена nponopiyio нально низкочастотной составляющей кинематической погрешности, а кинематическую погрешность определяют с учетом показаний датчика 7 угла поворота кольцевого генератора.
При вращении входного и выходного звеньев передачи 3 с кольцевых генераторов 1 и 2 снимаются сигналы, частоты которых пропорциональны скорости вращения входного и выходного звеньев контролируемой передачи 3.
Эти частоты можно определить из еледующего выражения:
Й-
где S - площадь, ограниченная параметром кольцевого генератора - длина волны излучения, L - периметр кольцевого генератора,
СО - угловая скорость. Так как измерительная ось кольцевого генератора 2 выходного звена передачи 3 направлена перпендикулярно его плоскости, то при наклоне кольцевого генератора 2 частота его сигнала пропорциональна проекции оси вращения выходного звена на измерительную ось кольцевого генератора 2, т.е.
F kQe,,, COStf ,
где Cf - угол наклона измерительной оси к оси выходного звена контролируемой передачи 3. Так как скорости входного и выходного звеньев не равны, то соответственно не равны и частоты сигналов, поступающих с кольцевых генераторов 1 и 2. Разность частот с блока 5 измерения разности частот подается на двигатель 6, которьй поворачивает кольцевой генератор 2 вокруг оси 4 до тех пор, пока частота сигнала F, , поступающая с кольцевого генератора 1,не уравняется с частотой F-, поступающей с кольцевого генератора 2. Эта же разность частот, несущая информацию о высокочастотной составляющей кинематической погрешности контролируемой передачи 3, поступает на первьш вход регистратора 8.
Угол tf измеряется датчиком 7 угла поворота кольцевого генератора 2 вокруг оси 4. Сигнал с него подается на второй вход регистратора В. Этот сигнал несет информацию о низкочастотной составляющей кинег зтической погрешности контролируемой передачи 3.
Формула изобретения
Способ контроля кинематической погрешности передач, заключающийся в том, что устанавливают на входном и выходном звеньях передачи датчики угла поворота, обкатывают контролиру-JO емую передачу, по разности частот, поступающих с датчиков угла поворота, определяют кинематическую погрешность передачи и регистрируют ее, о т л и- чающийся тем, что, с целью по-15 вьшения точности и информативности.
Редактор С. Патрушев.а
Составитель Б. Афонский
Техред М.Ходаиич Корректор Г. Решетник
Заказ 874/39Тираж 678Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
в качестве датчиков угла поворота используют кольцевые оптические квантовые генераторы, причем кольцевой генератор выходного звена имеет ось вращения, перпендикулярную оси выходного звена контролируемой передачи, устанавливают на этой же оси датчик угла поворота генератора и двигатель, в процессе контроля корректируют положение оси кольцевого генератора выходного звена пропорционально низкочастотной составляющей кинематической погрешности, а кинематическую погрешность определяют с учетом показаний датчика угла поворота кольцевого генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности синусных механизмов | 1980 |
|
SU896388A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1980 |
|
SU896389A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| СПОСОБ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ | 1971 |
|
SU315908A1 |
| Самопишущий прибор для непрерывного контроля кинематической погрешности передач и измерения углов поворота | 1960 |
|
SU134999A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1976 |
|
SU574605A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
| Способ измерения кинематической погрешности механизмов с дробным передаточным отношением | 1985 |
|
SU1325295A1 |
Изобретение относится к машиностроению, а именно к методам и средствам контроля передач. Цель изобретения - повышение точности и информативности за счет использования датчи ков входного и выходного звеньев с высокой разрешающей способностью.Это достигается тем, что в качестве датчиков входного и выходного звеньев используют кольцевые оптические квантовые генераторы 1 и 2. В процессе контроля корректируют положение оси кольцевого генератора 2 выходного звена пропорционально низкочастотной составляющей кинематической погрешности. Таким образом, на первый вход регистратора 8 поступает сигнал высокочастотной составляющей о.т блока 5 измерения разности частот, а на второй вход - сигнал с датчика 7 угла поворота квантового генератора 2, т.е. низкочастотной составляющей кинематической погрешности. 1 ил. i СЛ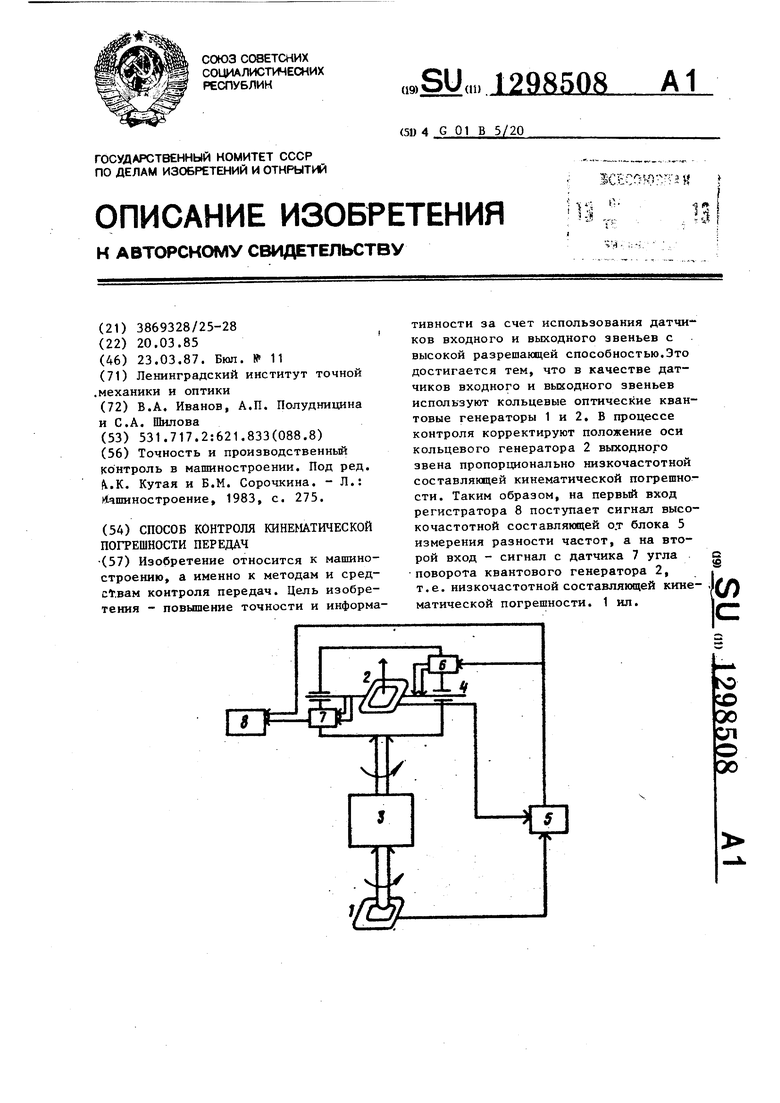
| Точность и производственный контроль в машиностроении | |||
| Под ред | |||
| .K | |||
| Кутая и Б.М | |||
| Сорочкина | |||
| - Л.: Машиностроение, 1983, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1921 |
|
SU275A1 |
