Изобретение относится к машиностроению и может быть использовано для автоматизации контактной точечной сварки.
Целью изобретения является снижение массы цилиндра, уменьшение габаритов кисти, уменьшение люфтов и за счет этого повышение долговечности работы и быстродействие привода, а также предохранение от повреждения свариваемой детали при залипании электродов.
В случае залипания электродов держатели электродов 3 и 4, ось 5 шарнира, штифт 11 остаются неподвижными относительно свариваемой детали. Шток-поршень 10 под действием подаваемого давления и движения робота будет перемещаться вместе с цилиндром 8. При этом пружина 12 сожмется, а штифт 11 отойдет от толкателя микровыключателя 13, контакт которого разомкнется и даст сигнал в систему
На фиг. 1 изображен робот для контакт- О управления роботом об его остановке.
ной точечной сварки, обший вид; на фиг. 2 цилиндр досылания и шарнир сварочных клещей, вид А на фиг. 1.
На выходном фланце 1 кисти робота
В связи с тем, что во время цикла сварки одной точки кисть робота перемещается к следующей, сокращается время паузы между циклами сварки, а производительность возустановлены клещи 2. Держатели электро- с растает в 1,5-2 раза.
дов 3, 4 установлены шарнирно на оси 5 шарнира выполненной в виде полого цилиндра. Ось 5 щарнира установлена на шариках б, находящихся в многорядном сепараторе 7. Шарики контактируют с цилиндрической поверхностью цилиндра до- 20 суре, сылавия 8, который связан с кронштейномНаличие
9, который закрепляется к выходному фланцу кисти 2. Внутри цилиндра досылания находится щток-поршень 10, который через штифт 11 связан с осью 5 шарнира. Штифт 25 11 находится в пазу штока-поршня и взаимодействует с ним через пружину 12, находящуюся внутри штока-поршня 10 и установленную с ним соосно со стороны поршня. С другой стороны штифт 11 взаПри этом ускорения и замедления звеньев робота отсутствуют, так как робот движется с постоянной скоростью, что резко с Нижает нагрузки на механические узлы и привод робота, что увеличивает его реблокировки от залипания электродов дает возможность предохранить свариваемые изделия от повреждения, что увеличивает выход годных изделий.
Формула изобретения
Кисть промышленного робота для контактной точечной сварки, содержащая выходной фланец, установленные шарнирно
имодействует со стенкой паза шток-порш- 30 держатели электродов, цилиндр досылания
ня и микровыключателем 13.
Устройство работает следующим образом.
Во время цикла сварки держатели электродов 3, 4 и связанные с ними ось 5 шарнира, штифт 11, шток-поршень 10, пружина 12, микровыключатель 13 остаются неподвижными относительно изделия. Цилиндр 8 перемещается вправо вместе с кронштейном
35
электродов со штоком-поршнем, отличающаяся тем, что, с целью упрощения конструкции, снижения ее массы и габаритов, а также предохранения от повреждения свариваемой детали при залипании электродов, она снабжена микровыключателем, закрепленным на щтоке-поршне и установленным с возможностью взаимодействия с микровыключателем, подпружиненным в направлении к нему штифтом, установленным в
9 вдоль кромки изделия вместе с кистью 40 пазах, предусмотренных в штоке-поршне и
стенке цилиндра, и закрепленным в выполненной в виде полого цилиндра оси шарнира держателей электродов, полый цилиндр оси шарнира снабжен шаровыми опорами, посредством которых он установлен на циробота. После окончания сварки электродо- держатели отходят от детали, в поршневую полость цилиндра подается давление и шток-поршень перемещается в правое положение затем дается команда на сварку следующей точки.
45
линдре.
В случае залипания электродов держатели электродов 3 и 4, ось 5 шарнира, штифт 11 остаются неподвижными относительно свариваемой детали. Шток-поршень 10 под действием подаваемого давления и движения робота будет перемещаться вместе с цилиндром 8. При этом пружина 12 сожмется, а штифт 11 отойдет от толкателя микровыключателя 13, контакт которого разомкнется и даст сигнал в систему
управления роботом об его остановке.
В связи с тем, что во время цикла сварки одной точки кисть робота перемещается к следующей, сокращается время паузы между циклами сварки, а производительность возрастает в 1,5-2 раза.
суре, Наличие
При этом ускорения и замедления звеньев робота отсутствуют, так как робот движется с постоянной скоростью, что резко с Нижает нагрузки на механические узлы и привод робота, что увеличивает его ресуре, Наличие
блокировки от залипания электродов дает возможность предохранить свариваемые изделия от повреждения, что увеличивает выход годных изделий.
Формула изобретения
Кисть промышленного робота для контактной точечной сварки, содержащая выходной фланец, установленные шарнирно
электродов со штоком-поршнем, отличающаяся тем, что, с целью упрощения конструкции, снижения ее массы и габаритов, а также предохранения от повреждения свариваемой детали при залипании электродов, она снабжена микровыключателем, закрепленным на щтоке-поршне и установленным с возможностью взаимодействия с микровыключателем, подпружиненным в направлении к нему штифтом, установленным в
стенке ц ненной ра держ оси шар посредст
45
линдре.
I ,,
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот для контактной точечной сварки | 1985 |
|
SU1258654A1 |
| РОБОТИЗИРОВАННЫЙ МОДУЛЬ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ | 2013 |
|
RU2542187C2 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Клещи для контактной точечной сварки | 1987 |
|
SU1473928A1 |
| Машина для контактной сварки | 1987 |
|
SU1542741A1 |
| КОНДЕНСАТОРНАЯ МАШИНА ДЛЯ ТОЧЕЧНОЙ СВАРКИ | 1967 |
|
SU197795A1 |
| Устройство для копирования линии стыка при сварке | 1985 |
|
SU1581537A1 |
| Ручной инструмент для контактной точечной сварки | 1980 |
|
SU925582A1 |
| Машина для контактной точечной сварки | 1983 |
|
SU1110577A1 |
| Электродное устройство для контактной точечной сварки | 1988 |
|
SU1648682A1 |

Изобретение относится к области машиностроения и может быть использовано для автоматизации контактной точечной сварки. Изобретение позволяет совмещать процесс сварки и движения робота, уменьшать динамические нагрузки на координаты и приводы робота, предохранять от повреждений свариваемую деталь при залипании электродов, снизить массу цилиндра, уменьшить габариты кисти робота. Во время цикла сварки держатели электродов 3, 4, ось 5 шарнира, штифт 11, шток-поршень 10, пружина 12, микровыключатель 13 остаются неподвижными относительно изделия. Одновременно цилиндр 8 перемещается с кистью робота. В случае залипания электродов держатели 3, 4, ось 5 шарнира, штифт 11 остаются неподвижными относительно свариваемой детали. Шток-поршень 10 под действием подаваемого давления и движения робота будет перемещаться вместе с цилиндром 8. При этом пружина 12 сожмется, а штифт 11 отойдет от толкателя микровыключателя 13, контакт которого разомкнется и даст сигнал в систему управления на остановку робота. 2 ил. 8идА i СЛ Ю to со (;o 4i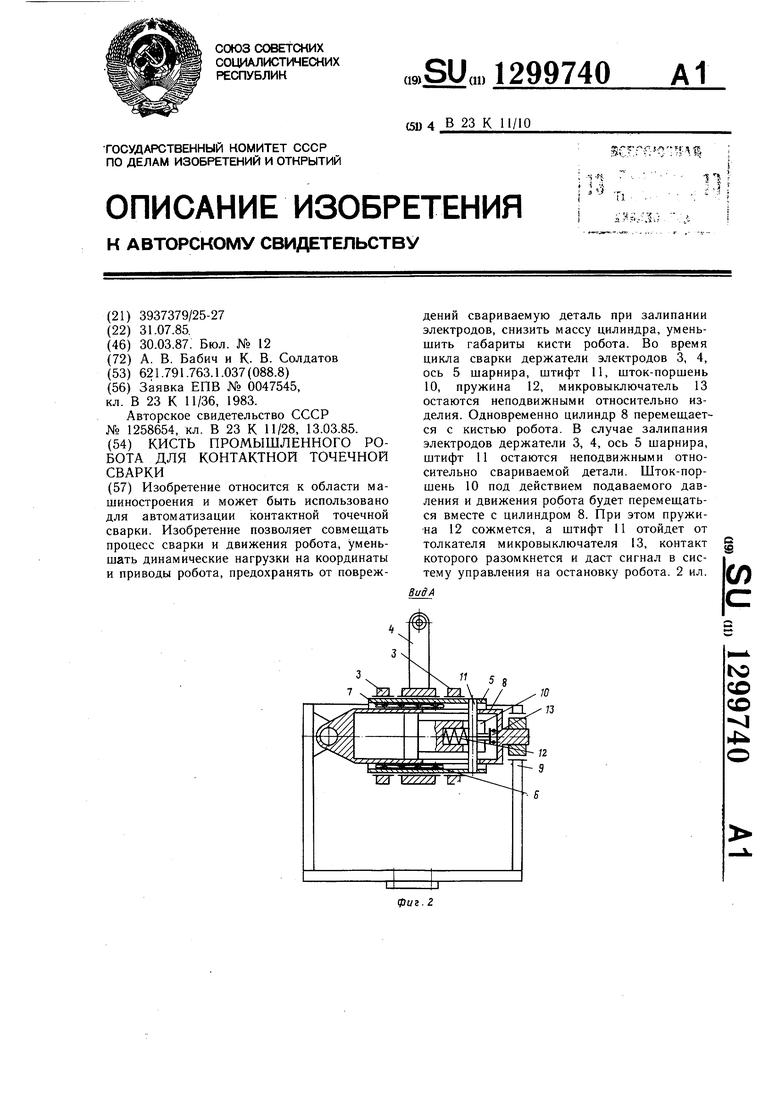
,1
| СПОСОБ УНИЧТОЖЕНИЯ ЧЕРНЫХ НЕГАТИВНЫХ ЦАРАПИН НА КИНОПЛЕНКАХ | 1935 |
|
SU47545A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Робот для контактной точечной сварки | 1985 |
|
SU1258654A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
