4
Изобретение относится к машиностроению и может быть использовано дпя автоматизации контактной точечной сварки.
Uertb изобретения - упрощение ко струкции и повьшение ее надежности
На фиг, 1 изображен робот яля контактной точечной сварки,общий вид .на фиг. 2 - узел I на фиг. 1 (сварочные клещи ; на фиг. 3 - разрез А-А на фиг. 2 (цилиндр возврата),
На выходном фланце 1 кисти робо установлены сварочные клещи 2, эле трододержатели 3, соединенные гид- |роцилиндром 4 сжатия электродов, |Шарнирно закреплены на корпусе цилиндра 5 возврата что позволяет электродам 6 самоустанавливаться п кромке свар ИваемоЛ) изделия в плоскости, перпендикулярной кромке. Од конец двустороннего штока Цилиндра 5 возврата, иарнирно закреплен на корпуса 7 сварочных клещей, жестко связанном с выходньп фланцем 1 кисти робота, а на другом установлены ролик 8, контактирующий с направляющей 9, выполненной в виде прямо угольной пластины, установленной на выходном фланце кисти, и кольцо 10, поджатое пружиной 1. На корпу 1Й линдра 5 возврата установлен рол 12 слежения за кромкой. Для фиксац корпуса цилиндра 5 возврата относительно его штока они связаны между собой осью 13, параллельной оси ци линдра возврата. 5. Благодаря этому свариваемые точки находятся на одинаковом расстоянии от кромки свариваемого изделия.
Устройство работает следующим о разомi
Во время циКла цилиндра возврата рододержателями 3 ными относительно
сварки точки корпус 5 вместе с элект- остаются неподвиж- свариваемого изделия, а шток цилиндра возврата продолжает движение вдоль кромки свариваемого изделия вместе с кистью робота. Для компенсации возникающего при этом изгибающего момента между корпусом и штоком цилиндра 5 возврата установлена пружина 14. После окончания цикла сварки точки электродо- держатели 3 вместе с корпусом ци.пинд
pa 5 возврата возвращаются в исходное положение относительно кисти робота.
В связи с тем, что во время цикла сварки одной точки кисть робота перемещается к следующей, сокращается время паузы между циклами сварки, и производительность процесса в целом возрастает в 1,5-2 раза.
В связи с отсутствием ускорений и замедлений механических звеньев промыпшенного робота динамические нагрузки на координаты и приводы робота заметно понижаются, а следовательно, увеличивается ресурс работы робота. Возможность самоустановки сварочных клещей по кромке свариваемого изделия снижает требования к точности базирования изделия относительно промьтшенного робота и к точности отработки траектории движения кисти робота. Применение цилиндра обеспечивает быстродействие, т.е. сокращает время разгона, упрощает конструкцию при повыщении точности позиционирования и качества сварного соединения.
Ф
ормула изобретения
Робот для контактной точечной сварки, содержащий манипулятор с выходным фланцем на кисти, клещи с электрододержателями и устройство для возвратно-поступательного перемещения клещей, отличающийся тем, что, с целью упрощения конструкции и повышения ее надежнос- 1ти, устройство для возвратно-поступательного перемещения клещей выполнено в виде закрепленной на выходном фланце направляющей, установленного перпендикулярно оси кисти и шарнирно связанного с электро- додорй ателями цилиндра с двусторонним штоком, один конец которого шар нирно связан с выходным фпанцем, а другой оснащен роликом, контактирующим с направляющей, и подпружиненным относительно выходного фланца кольцом, при зтом корпус цилиндра снабжен жестко закрепленным роликом слежения за кромкой свариваемого изделия .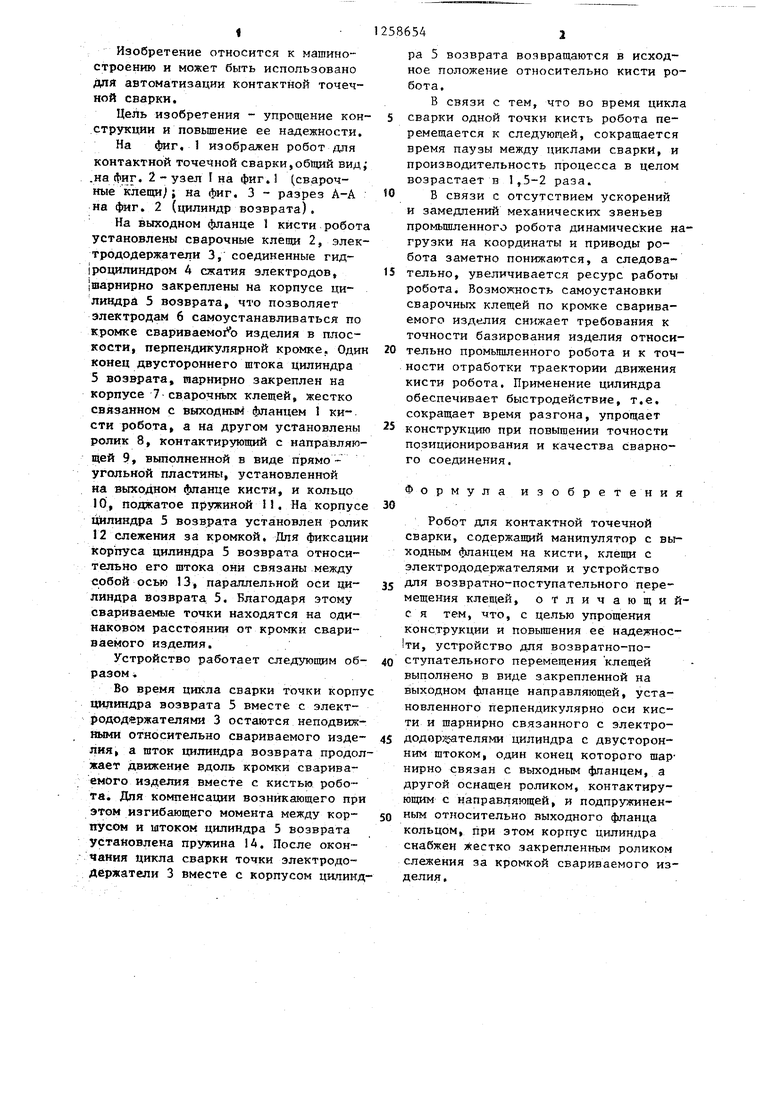
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть промышленного робота для контактной точечной сварки | 1985 |
|
SU1299740A1 |
| С-ОБРАЗНЫЕ ШТОКОВЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ ЭЛЕКТРОСВАРКИ, ВСТРОЕННЫЕ В РОБОТ | 2001 |
|
RU2221681C2 |
| Сварочные клещи для контактной точечной сварки | 1985 |
|
SU1291333A1 |
| СВАРОЧНЫЕ КЛЕЩИ | 2009 |
|
RU2449869C2 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| Устройство для контактной точечной сварки | 1989 |
|
SU1694366A1 |
| Способ обучения промышленного робота | 1985 |
|
SU1340956A1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОЙ ПОДАЧИ СВАРОЧНЫХ КЛЕЩЕЙ | 1994 |
|
RU2065805C1 |
| Пистолет для контактной точечной сварки | 1986 |
|
SU1411110A1 |

Изобретение относится к малт- ностроению и может быть использовано для автоматизации контактной сварки; Целью изобретения является упрощение конструкции и повьшение надежности устройства. Робот содержит привод возвратно-поступательного перемещения клещей с электрододержателями 3, выполненный в виде цилиндра 5, шарнирно связанного с электро- додержателями и имеющего двусторонний шток. Один конец штока шарнирно связан с выходньм фланцем 1 кисти робота, а другой снабжен роликом 8, взаимодействующим с направляющей 9, закрепленной на фланце, и подпружиненным кольцом 10. Во время цикла сварки корпус цилиндра 5 вместе с злектрододержателями остается неподвижным относительно свариваемого изделия, а щток цилиндра продолжает движение вдоль кромки изделия вместе с кистью робота. После окончания цикла сварки точки электрододержа- тели 3 вместе с корпусом цилиндра возвращаются в исходное положение относительно кисти робота. 3 ил. i (Л to ел оо Од СП 4
I it epHfimo
Кромка свари ваемогс изделия
ФгУЗ.З
| СПОСОБ УНИЧТОЖЕНИЯ ЧЕРНЫХ НЕГАТИВНЫХ ЦАРАПИН НА КИНОПЛЕНКАХ | 1935 |
|
SU47545A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
