Изобретение относится к машиностроению, точнее к манипуляторам, предназначенным для автоматизации на загрузочно- разгрузочных операциях.
Цель изобретения - повышение точности позиционирования механической руки в ее крайних по углу поворота положениях за счет разделения движений подъема и поворота в указанных положениях.
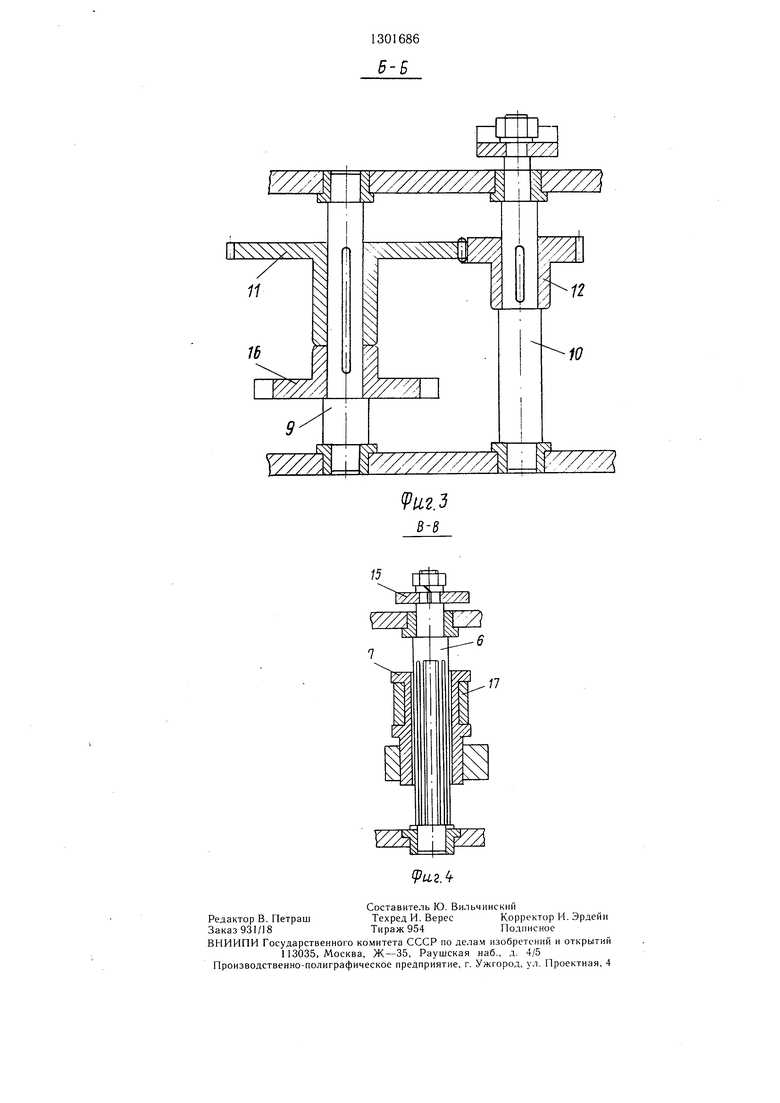
На фиг. 1 показан манипулятор, общий вид ; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1.
Манипулятор содержит установленный на основании 1 привод 2, приводной вал 3, на котором закреплены пазовый кулак 4 и цевка 5 мальтийского механизма, шлицевый вал 6, на котором с возможностью продольного перемешения установлена втулка 7 с закрепленной на ней механической рукой 8, два промежуточных вала 9 и 10, кинематически связанные между собой зубчатой передачей 11 - 12, и шатун 13, шарнирно связанный с кривошипами 14 и 15, закрепленными соответственно на валах 10 и 6.
На валу 9 закреплен крест 16 мальтийского механизма. На основании 1 шарнирно смонтирован двуплечий рычаг 17, один торец которого размешен в пазу кулака 4, а другой, выполненный в виде вилки, размешен во втулке 7.
Манипулятор работает следуюшим образом.
При включении привода начинает вра- ш.аться вал 3 и через мальтийский механизм 5, 16, валы 9, 10 и кривошипно-шатунный механизм 14 поворачивается вал 6 с механической рукой 8. В момент выстоя креста
16 мальтийского механизма и, соответственно, выстоя механической руки 8 в крайнем по углу поворота положении от кулака 4 совершает качательное движение рычаг 17. При этом механическая рука опускается, захватывает изделие и вместе с ним поднимается. При дальнейшем вращении приводного вала 3 вновь начинает работать мальтийский механизм 5, 16, рука 8 поворачивается в другое крайнее положение и далее в момент ее выстоя происходит опускание руки 8, освобождение изделия и подъем руки 8 в исходное положение.
Формула изобретения
Манипулятор, содержащий смонтированные на станине подъемно-поворотный вал с механической рукой и приводной вал, который кинематически связан с первым валом кривошипно-шатунным механизмом его поворота и кулачково-рычажным механизмом подъема этого вала, отличающийся тем, что, с целью повышения точности позиционирования механической руки в ее крайних по углу поворота положениях за счет разделения движений подъема и поворота в указанных положениях, он снабжен дву.мя кинемати.чески связанными между собой дополнительными валами, оси которых параллельны оси подъемно-поворотного вала, и мальтийским механизмом, причем цевка указанного механизма закреплена на приводном валу, а крест - на первом дополнительном валу, при этом второй дополнительный вал снабжен кривошипом, с которым шарнирно связан шатун указанного криво- шипно-шатунного механизма поворота.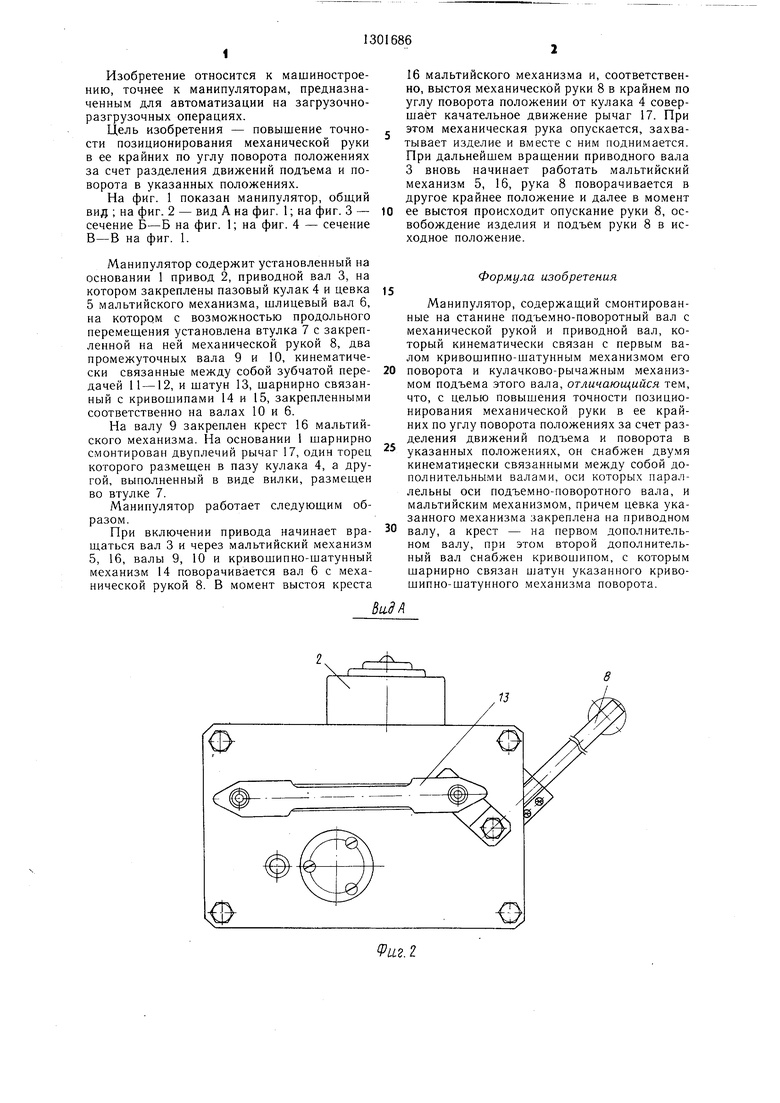
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| Устройство для маркировки изделий | 1980 |
|
SU859202A1 |
| Устройство для зигзагообразного фальцевания бумажной полосы | 1982 |
|
SU1193088A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Устройство для преобразования вращательного движения в колебательное | 1987 |
|
SU1483139A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
Изобретение относится к области машиностроения, а именно к манипуляторам, предназначенным для автоматизации загру- зочно-разгрузочных операций. Целью изобретения является повышение точности позиционирования механической руки в ее крайних по углу поворота положениях за счет разделения движений ее подъема и поворота в указанных положениях. При вращении приводного вала 3, на котором закреплены пазовый кулак 4 и цевка 5 мальтийского механизма, механическая рука 8 совершает поворот из одного крайнего положения в другое с помощью мальтийского механизма и кривошипно-шатунного механизма, а в момент выстоя в этих положениях осуществляется ее опускание - подъем с помощью кулачково-рычажного механизма с целью захвата или укладки изделия. 4 ил. / Фиг 1 0:5 О с 00 С5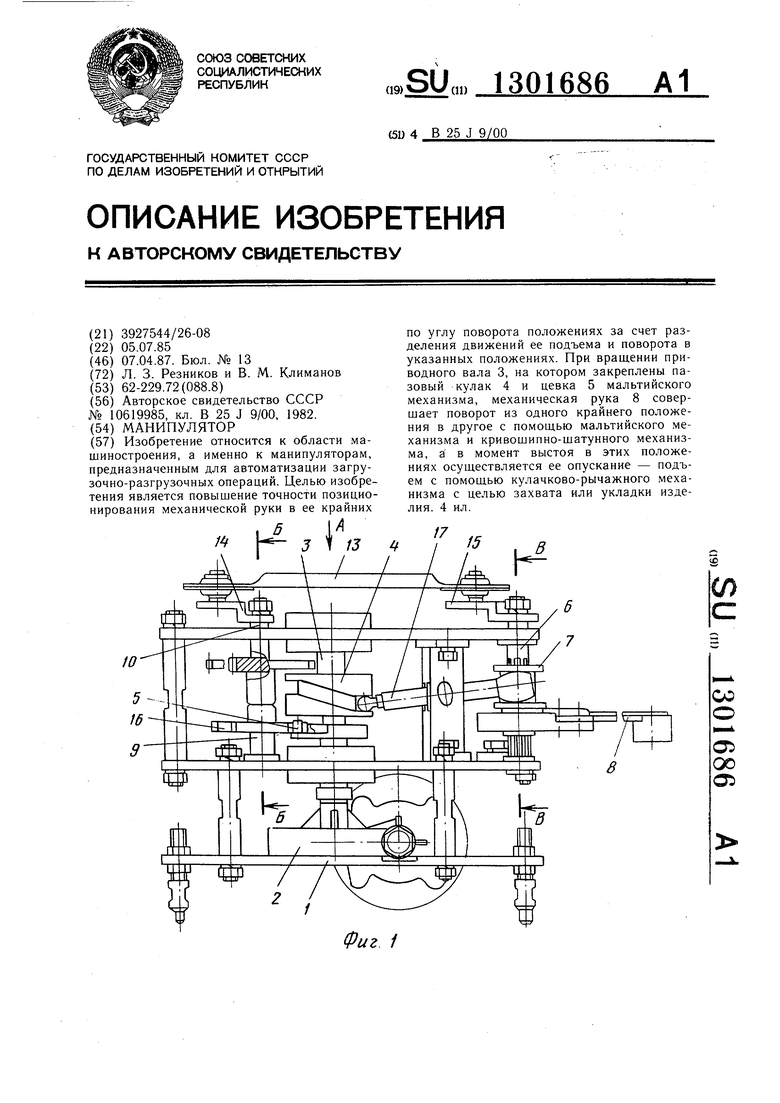
6-В
te.3
в-в
Vu,2A
Составитель Ю. Вильчинскнй
Редактор В. ПетрашТехред И. ВересКорректор И. Эрдейи
Заказ 931/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 10619985, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
