Изобретение относится к робототехнике и может быть использовано в машностроении при сборке деталей любой формы,
Цель изобретения - повышение точности определения формы детали и определения усилия зажима, что достигается расположением излучателей на упругой мембране, закрепленной на губке схвата.
На чертеже представлен схват, общий вид.
Очувствленный схват содержит рычаги 1 и 2, гибкие мембраны 3 и 4, выполненные из однородного эластичного материала и прикрепленные к рычагам 1 и 2 соответственно, источники 5 излучения,- установленные на нерабочих поверхностях гибких мембран и соединенных с блоком электронного переключения (не показан), .приемники 6 излучения, неподвижно закрепленные на внутренних боковых поверхностях зажимных рычагов и соединенные с блоком управления робота (не показан) ,
Устройство работает следующим образом,
В исходном состоянии перед взятием детали гибкие мембраны не деформированы, источники излучения выключены. После захвата и снятия детали 7 происходит деформирование мембран 3 и 4. По сигналу с блока управления с помощью блока электронного переключения поочередно включаются и выклюРедактор В,Петраш
Составитель А,Чернышов
Техред Л.Олийньпс Корректор Н.Король
Заказ 4010/16Тираж 951 Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород,, ул. Проектная, 4
чаются световоды и производится регистрация при включении каждого из источников уровней освещенности фотоэлементов по величине электричес-
кого тока, протекающего через фотоэлементы (каждому значению освещенности соответствует определенная величина электрического тока), Форма,
размеры, положение детали определяются по формуле, либо по заранее подготовленным таблицам, хранимым в памяти блока управления робота, О величине усилия зажима детали судят, например, непосредственно по величине электрического тока, протекающего через фотоэлементы.
После освобождения детали 7 из ры- чагов 1 и 2 гибкие мембраны 3 и 4 возвращаются в исходное состояние,
Формула изобретения
Очувствленный схват робота, содержащий захватные рычаги, источник излучения и приемник, отличающийся тем, что, с целью повышения точности определения формы детали и определения усилия зажима, он дополнительно снабжен гибкими мембранами, закрепленными на зажимных рычагах, выполненных в виде полых стаканов, причем источники излучения расположены на внутренней стороне мембраны, а приемники - на внутренних поверхностях зажимных рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1983 |
|
SU1090550A2 |
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Схват очувствленного робота | 1984 |
|
SU1227462A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват манипулятора | 1985 |
|
SU1288053A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват промышленного робота | 1989 |
|
SU1770121A1 |
| СХВАТ ДЛЯ ТОНКОСТЕННЫХ ДЕТАЛЕЙ | 2003 |
|
RU2253563C2 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
Изобретение относится к робототехнике и может быть использовано в машиностроении при сборке деталей любой формы. Целью изобретения является повышение точности определения формулы детали, что достигается расположением излучателей на упругой мембране, закрепленной на губке схва- та. Очувствленный схват содержит рычаги 1 и 2,-Гибкие мембраны 3 и 4, выполненные из эластичного материала и закрепленные на рычагах. Источники излучения 5 установлены на нерабочих поверхностях мембран, а приемники 6 излучения закреплены на внутренних поверхностях зажимных рычагов. В исходном состоянии мембраны не деформированы, после захвата детали 7 происходит деформация мембран 3 и 4, По сигналу с блока управления поочередно включаются и выключается источники излучения 5 и происходит регистрация данных приемниками 6. После обработки полученных данных определяется форма детали и усилие захвата. 1 ил. (Л Ь FoK 00 00 СП 4 4 СО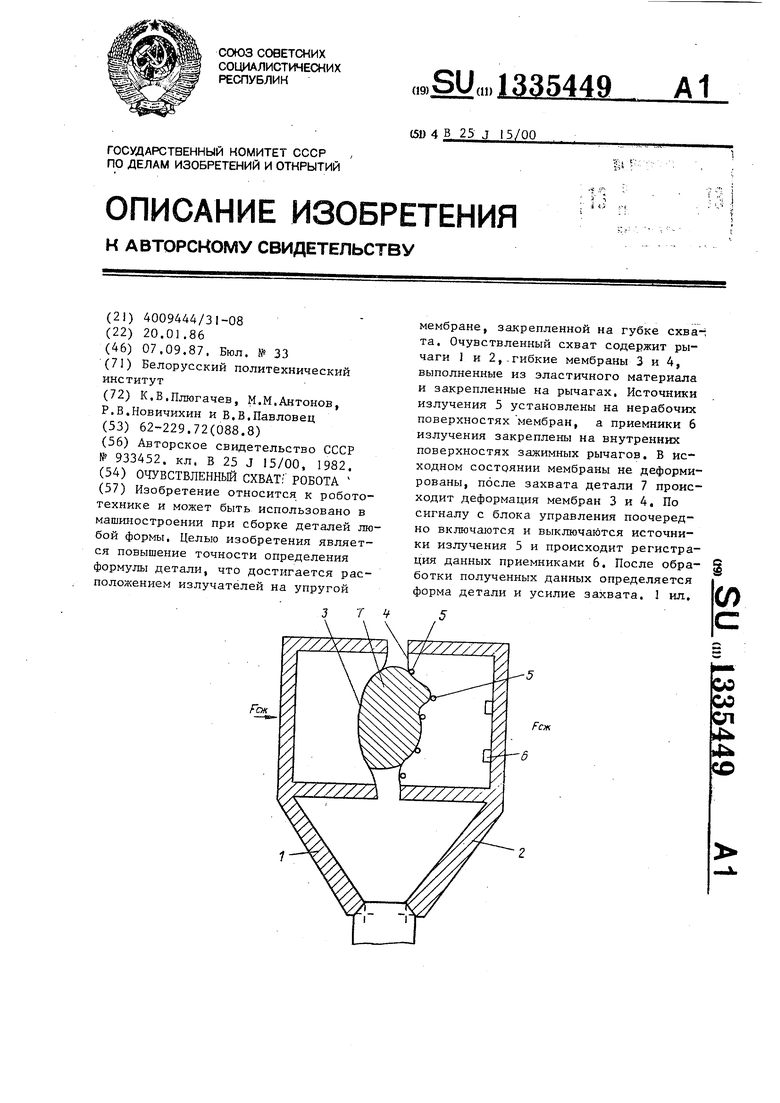
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
