Изобретение относится к робототехнике и предназначено для захвата предметов сложной формы, выполненных из нетокопроводного материала.
Целью изобретения является повы- шение быстродействия и расширение функциональных возможностей путем определения типа захватываемой детали при заданной номенклатуре деталей.
На фиг, 1 показан схват, общий вид; па фиг. 2 - то же, в рабочем положении.
Схват включает основной привод ( линейного перемещения, соединенный шарнирно посредством рычагов 2 и диагонали 3 шарнирного параллело- - грамма со средним звеном А зажимных губок. Зажимные губки состоят из шарнирно соединенных между собой звенье 5, 6,4, 7 и 8. К боковым шарнирам 9, 10 крепятся .рычаги дополнительных шарнирных параллелограммов с дополнительными приводами 11, 12. Среднее звено 4 губок выполнено из электро- изоляционного материала, например пластмассы, остальные звенья 5-8 и шарниры 13, 14 губок выполнены из токопроводящего материала. Звенья губок электрически изолированы от рычагов 2 схвата (например, путем выполнения центральных шарниров 15 звеньев губок из токонепроводящего материала). Два звена 6 и 7 губок, смежных звену 4, соединены проводами 16 с входом измерителя 17 электрического сопротивления, выход которого соединен с блоком 18 управления манипулятором. На основном приводе 1 имеется место 19 крепления схвата.
Устройство работает следующим образом.
t
Схват подводят к захватываемой детали 20 до соприкосновения и уста- новки среднего звена 4 относительно детали 20, Далее включают основной привод 1. При изменении длины диагонали 3 за счет шарнирного соединения рычагов 2 и их перемещения происхо- дит перемещение звеньев 6, 7 губок до их установки относительно захватываемого предмета (20). Затем включают дополнительные приводы 11, 12 и происходит установка относительно детали 20 звеньев 5,8, включают следующие приводы и происходит установка следующих звеньев губок и т.д. В момент, когда заканчивается схват по всему контуру детали 20, происходит касание звеньев, например 6, 7 (фиг, 2), между собой, и величина сопротивления на входе измерителя 17 резко уменьшается от бесконечности до какой-то определенной величины. Данные о величине измеренного сопротивления поступают в блок 18 управления, который в момент окончания захвата детали 20 по всему периметру останавливает все приводы схвата. Величина электрического сопротивления на входе измерителя 17 зависит от числа звеньев губок, участвующих в захвате. При заданной номенклатуре деталей данного производственного участка, цеха можно заранее определить, какая величина сопротивления на входе измерителя 17 получается при захвате каждой из детали. Таким образом, по величине сопротивления определяют какая именно деталь находится в схвате. Далее манипулятор переносит деталь 20 в нужную точку позиционирования, после чего происходит размыкание звеньев зажимных губок в цбратной последовательности
Формула изобретения
Схват манипулятора по авт,св. № 1090549, отличающийся тем, что, с целью повышения быстродействия и расширения функциональных возможностей за счет определения типа захватываемой детали при заданной номенклатуре деталей он снабжен измерителем,электрического сопротивления, а все звенья зажимных гуВок, за исключением среднего, и их шарниры выполнены из токопровод- ного материала и электрически изолированы от рычагов, при этом измеритель электрического сопротивления подк11ючен к звеньям, смежным со средним звеном.
«VJ N 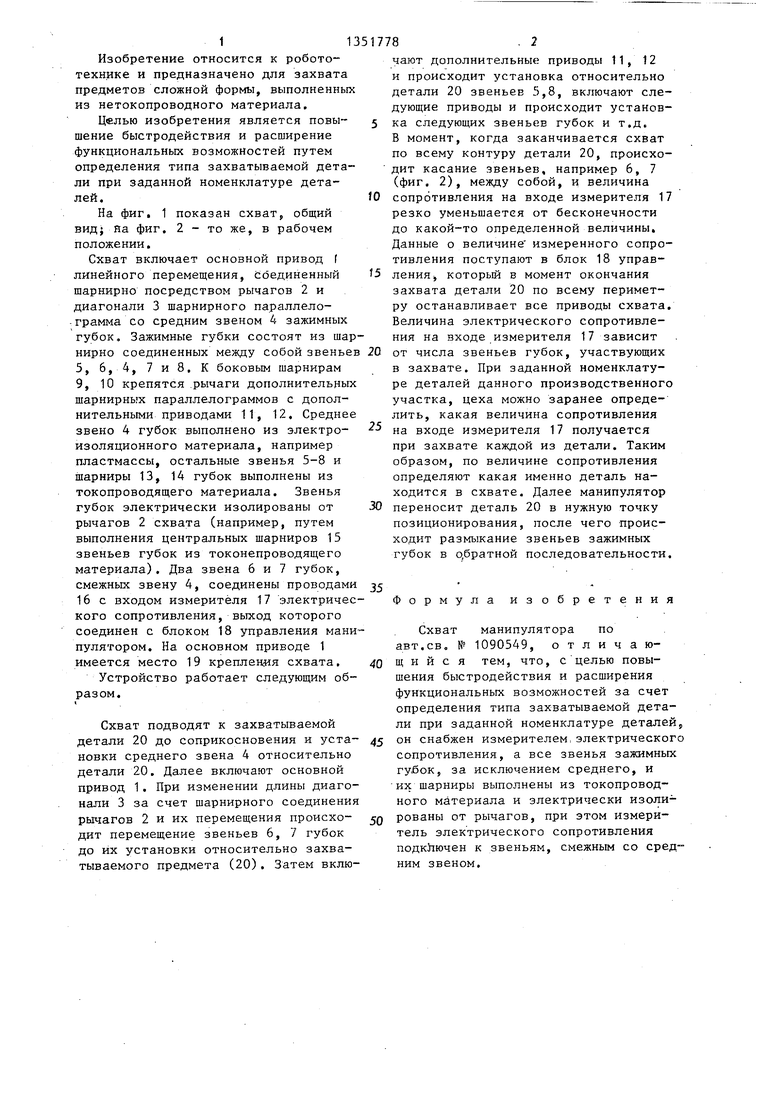
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Схват манипулятора | 1986 |
|
SU1495118A1 |
| Схват | 1983 |
|
SU1098790A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
Изобретение относится к радиотехнике и предназначено для захвата предметов сложной формы, вьШолненньк из нетокопроводного материала. Целью изобретения является повышение быстродействия и расширение функциональных возможностей за счет определения типа захватываемой детали при заданной номенклатуры деталей. После соприкосновения среднего звена 4 губок, выполненного из электроизоляционного материала, с деталью включается основной привод 1 и происходит перемешение смежных звеньев 6 и 7 до их установки также относительно этой захватываемой детали. Затем перемещаются звенья 5 и 8, которые так же, как и звенья 6 и 7, выполнены из токопроводного материала. При замыкании звеньев между собой по окончании захвата срабатывает измеритель 17 электрического сопротивления, соединенный со звеньями 6 и 7, который выдает сигнал на выключение приводов схвата. По величине сопротивления определяют тип захваченной детали. 2 ил. с S (Л 16 ОО сл vj 00 N) дзие.1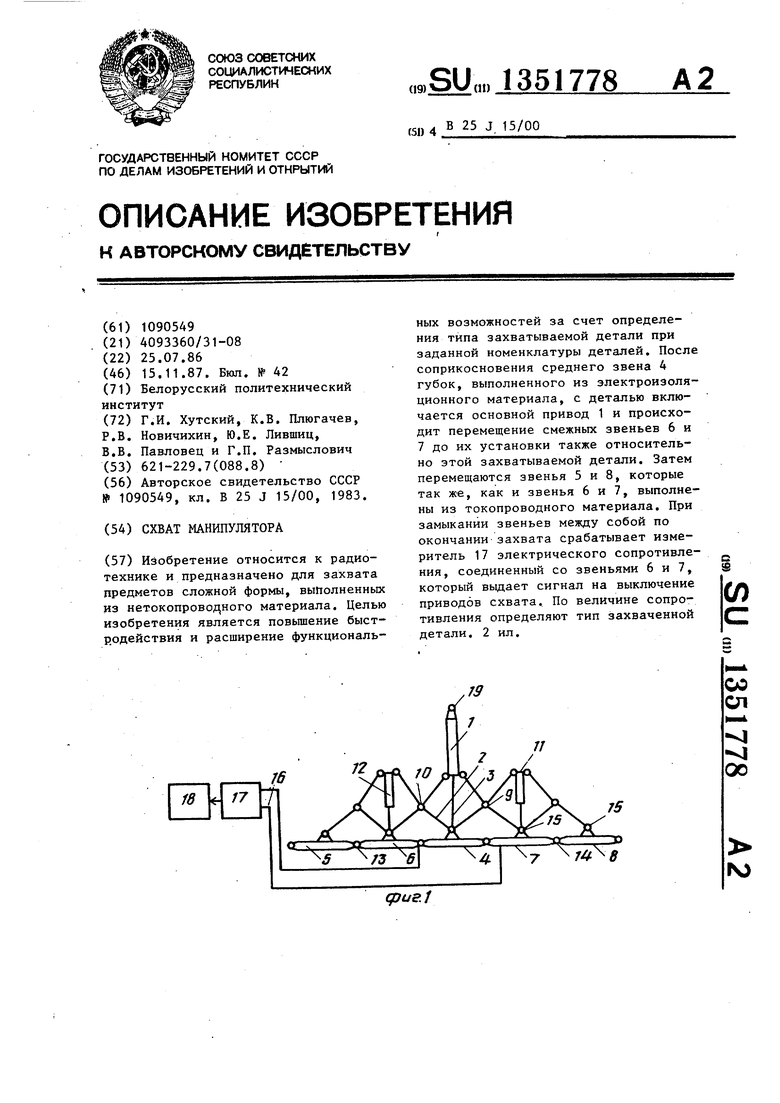
Редактор А.Маковская
Составитель Ф.Майоров Техред Л. Олийнык
Заказ 5525/13
Тираж 952. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
Корректор Л.Патаи
| Схват манипулятора | 1983 |
|
SU1090549A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
