(Л
со оо
U04336
при сведении призматических губок 3 и деформации мембраны 4, закрывающей полость, выполненную в каждой губке, в которой расположен поршень 5. В полости между поршнем 5, подпружиненном к губке, и мембраной 4 находится ферромагнитная жидкость 7, которая по6
сле деформации мембраны и компенсирующего перемещения.поршня 5-затйер- девает под действием магнитного поля, создаваемого электрической обмоткой 8, увеличивая контактную поверхность губок 3 схвата с захватываемой деталью 9. 1 ил.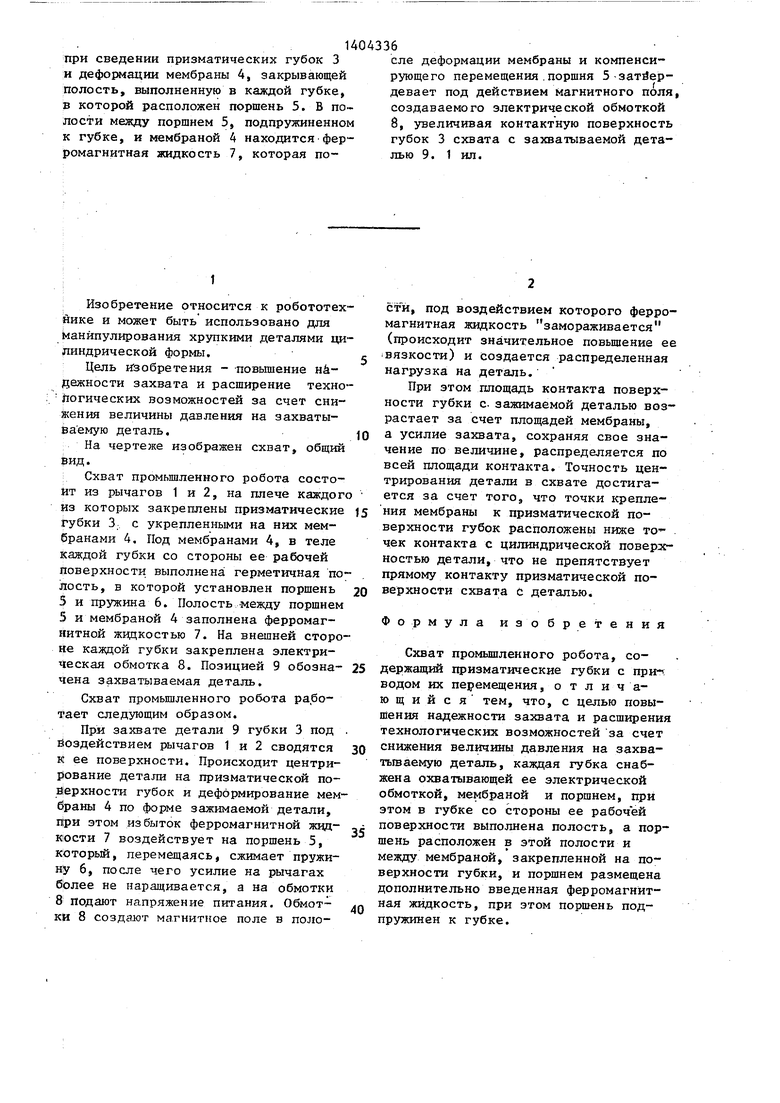
| название | год | авторы | номер документа |
|---|---|---|---|
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват манипулятора | 1985 |
|
SU1288053A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Схват | 1987 |
|
SU1419881A1 |
Изобретение относится к робототехнике и может быть использовано для манипулирования хрупкими деталями цилиндрической . Целью изобретения является повышение надежности захвата и расширение технологических возможностей за счет снижения величины давления на захватываемую деталь. Захват детали 9 происходит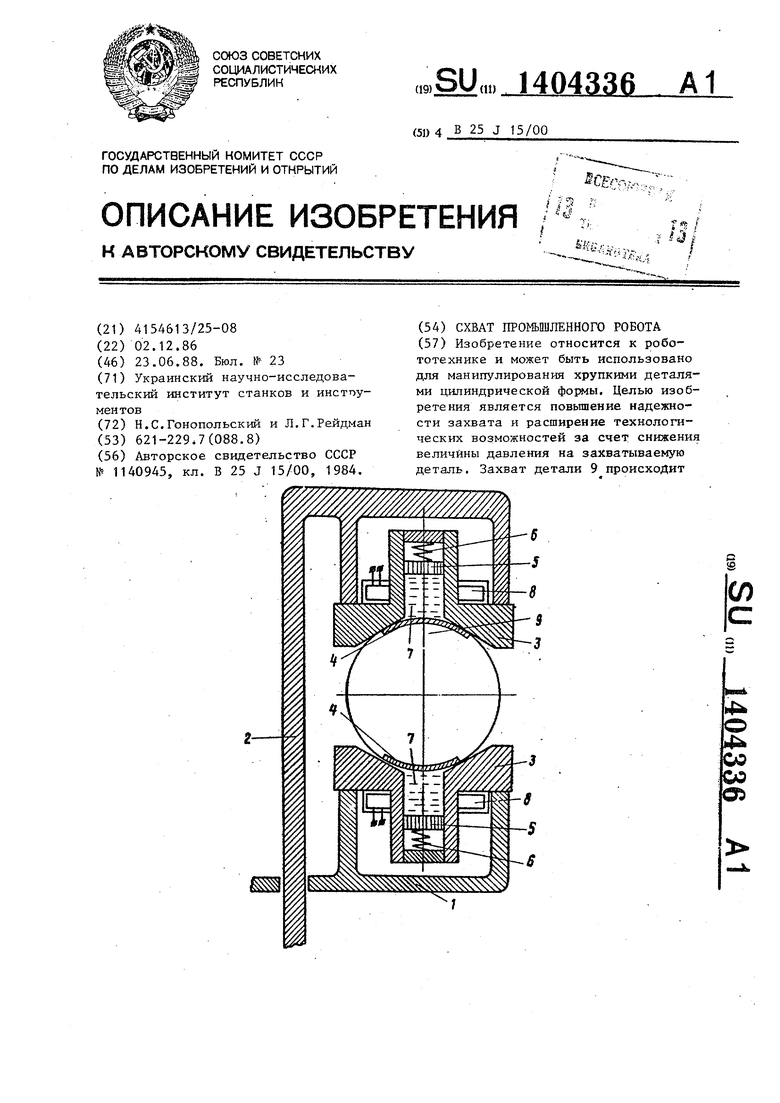
1
Изобретение относится к робототехнике и может быть использовано для Манипулирования хрупкими деталями цилиндрической формы.
Цель изобретения - повьшение нё- дежности захвата и расширение техно- Логических возможностей за счет снижения величины давления на захватываемую деталь.
На чертеже изображен схват, общий вид.
Схват промьпиленного робота состоит из рычагов 1 и 2, на плече каждого из которых закреплены призматические губки 3 с укрепленными на них мембранами 4. Под мембранами 4, в теле каждой губки со стороны ее рабочей поверхности выполнена; герметичная полость, в которой установлен поршень 5 и пружина 6. Полость между поршнем 5 и мембраной 4 заполнена ферромагнитной жидкостью 7. На внешней стороне каждой губки закреплена электрическая обмотка 8. Позицией 9 обозна- чена захватываемая деталь,
Схват промышленного робота работает следующим образом.
При захвате детали 9 губки 3 под йоздействием рычагов 1 и 2 сводятся К ее поверхности. Происходит центрирование детали на призматической поверхности губок и деформирование мембраны 4 по форме зажимаемой детали, ntpH этом избыток ферромагнитной жидкости 7 воздействует на поршень 5, который, перемещаясь, сжимает пружину 6, после чего усилие на рычагах более не наращивается, а на обмотки 8 подают напряжение питания. Обмот- ки 8 создают магнитное поле в поло
O
5 0 5
О ,,
5
сти, под воздействием которого ферромагнитная жидкость замораживается (происходит значительное повьщ1ение ее iвязкости) и создается распределенная нагрузка на деталь.
При этом площадь контакта поверхности губки с. зажимаемой деталью возрастает за счет площадей мембраны, а усилие захвата, сохраняя свое значение по величине, распределяется по всей площади контакта. Точность центрирования детали в схвате достигается за счет того, что точки крепления мембраны к призматической поверхности губок расположены ниже то чек контакта с цилиндрической поверхностью детали, что не препятствует прямому контакту призматической поверхности схвата с деталью.
Формула изобретения
Схват промышленного робота, содержащий призматические губки с водом их перемещения, отличающийся тем, что, с целью повышения надежности захвата и расширения технологических возможностей за счет снижения величины давления на захва- тьшаемую деталь, каждая губка снабжена охватывающей ее электрической обмоткой, мембраной и поршнем, при этом в губке со стороны ее рабочей поверхности выполнена полость, а поршень расположен в этой полости и между мембраной, закрепленной на поверхности губки, и поршнем размещена дополнительно введенная ферромагнитная жидкость, при этом поршень подпружинен к губке.
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
