Изобретение относится к машиностроению, и может быть использовано для контроля размеров деталей в схватах манипуляторов.
Цель изобретения - упрощение конструкции и расширение функциональных возможностей устройства.
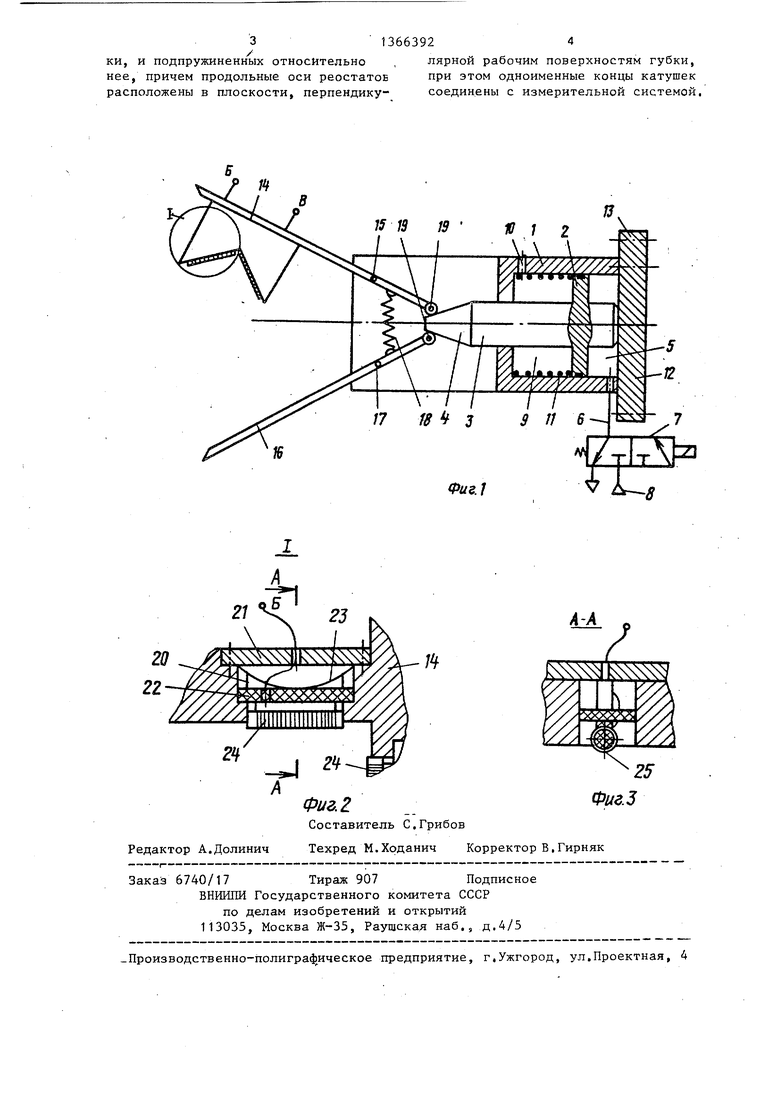
На фиг,1 изображен очувствленный схват робота, общий вид; на фиг,2 - узел 1 на фиг,1; на фиг,3 - разрез А-А на фиг,2,
Очувствленный схват робота содержит корпус 1, в котором размещен поршень 2 пневматического привода со штоком 3, на котором выполнен конический хвостовик 4, Полость 5 привода соединена пневмолинией 6 с элект- ропневмоклапаном 7, к которому подсоединена линия 8 сжатого воздуха, В полости 9 привода, соединенной .с атмосферой отверстием 10, расположена пружина 11, На крышке 12 привода выполнены элементы крепления схвата 13 к руке манипулятора. Призматическая . губка 14 схвата закреплена на оси 15, а прямолинейная губка 16 - на оси 17, Губки подпружинены пружиной 18, На концах губок 14 и 16 выполнены ролики 19, которые контактируют с коническим хвостовиком 4, В призматической губке 14 выполнены два внутренних ступенчатых паза-20, закрытые крышками 21; В каждом пазе .установлен неэлектропроводный каркас
22,подпружиненный плоской пружиной
23,На каркасе 22 установлен реостат 24 с катушкой 25, выполненной эмалированным или оксидированным проводом
10
15
под давлением из линии 8 поступает по пневмоканалу 6 в полость 5 и, воздействуя на поршень 2, перемещает его в крайнее положение, При этом конический хвостовик 4 штока 3 взаимодействует с роликами 19 и губки 14 и 16 поворачиваются на осях 15 и 17, растягивая пружину 18, В момент зажима детали каркасы 22 вдвигаются внутрь пазов 20, преодолевая усилие плоских пружин 23, при этом жесткость пружины 23 выбирается из условия создания необходимого усилия контакта, В зависимости от диаметра захватываемой детали ее касание с контактной дорожкой катушки 25 происходит в разных местах, в результате меняется сопротивление участка Б-В, которое состоит из сопротивления двух участков катушек 25 и сопротивления детали. После измерения сопротивления и, следовательно, размера детали робот производит позиционирование детали 25 и разжим.губок схвата. Для этого
снимается управляющий сигнал с элек- тропневмоклапана 7, полость 5 соединяется с атмосферой, под действием пружины 11 поршень 2 возвращается в исходное положение и под действием пружины 18 губки 14 и 16 разжимаются.
Сопротивление детали на несколько порядков меньше, чем сопротивление катушки, поэтому на точности измерения практически не скажется.
Предложенный схват можно использовать для оснащения роботов, работающих в составе робототехнических комплексов контроля и измерения раз20
30
35
с последующим покрытием лаком. На ка- 40 Р° электропроводных деталей без тушке 25 зачищена и отполирована кон- устанбвки на специальное измерительное устройство, что повьш1ает быстродействие работы комплексов, при этом
тактная дорожка. Каркас 22 может быть выполнен из Jкepaмичecкoгo материал, пластмассы или гетинакса. Выводы катушек реостатов Б и В подсоединяются к измерительной системе. Система может быть выполнена как схема непосредственного измерения сопротивления, а также как мостовая схема с измерением тока амперметром в диагонали моста, причем выводы В и В находятся на одноименных концах катушек (ближйих либо дальних от угла призмы).
Очувствленный схват работает следующим образом.
Робот позиционирует схват к захватываемой детали. После подачи сигнала на электропневмоклапан 7 воздух
45
детали могут быть различной формы и конфигурации.
Формула изобретения
Очувствленный схват робота, содержащий подвижные губки, одна из кото50 рых выполнена призматической со встро енным датчиком для измерения геометрических размеров детали, соединенным с измерительной системой, отличающийся тем, что, с
55 целью упрощения конструкции и расширения функциональных возможностей, датчик выполнен в виде двух реостатов, установленных в пазах, выполненных на рабочих Поверхностях губ
5
под давлением из линии 8 поступает по пневмоканалу 6 в полость 5 и, воздействуя на поршень 2, перемещает его в крайнее положение, При этом конический хвостовик 4 штока 3 взаимодействует с роликами 19 и губки 14 и 16 поворачиваются на осях 15 и 17, растягивая пружину 18, В момент зажима детали каркасы 22 вдвигаются внутрь пазов 20, преодолевая усилие плоских пружин 23, при этом жесткость пружины 23 выбирается из условия создания необходимого усилия контакта, В зависимости от диаметра захватываемой детали ее касание с контактной дорожкой катушки 25 происходит в разных местах, в результате меняется сопротивление участка Б-В, которое состоит из сопротивления двух участков катушек 25 и сопротивления детали. После измерения сопротивления и, следовательно, размера детали робот производит позиционирование детали 5 и разжим.губок схвата. Для этого
снимается управляющий сигнал с элек- тропневмоклапана 7, полость 5 соединяется с атмосферой, под действием пружины 11 поршень 2 возвращается в исходное положение и под действием пружины 18 губки 14 и 16 разжимаются.
Сопротивление детали на несколько порядков меньше, чем сопротивление катушки, поэтому на точности измерения практически не скажется.
Предложенный схват можно использовать для оснащения роботов, работающих в составе робототехнических комплексов контроля и измерения раз0
0
5
45
детали могут быть различной формы и конфигурации.
Формула изобретения
Очувствленный схват робота, содержащий подвижные губки, одна из которых выполнена призматической со встроенным датчиком для измерения геометрических размеров детали, соединенным с измерительной системой, отличающийся тем, что, с
целью упрощения конструкции и расширения функциональных возможностей, датчик выполнен в виде двух реостатов, установленных в пазах, выполненных на рабочих Поверхностях губ3 13663924
ки, и подпружиненных относительно , лярной рабочим поверхностям губки, нее, причем продольные оси реостатов при этом одноименные концы катушек расположены в плоскости, перпендику- соединены с измерительной системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
Изобретение относится к области машиностроения и может быть использовано для контроля размеров деталей в схватах манипуля,торов. Цель изобретения состоит в упрощении конструкции и расширении функциональных воз можностей. Для этого в призматической губке схвата устанавливается датчик для измерения геометрических размеров детали. Датчик выполнен в виде двух реостатов с катушками. Рео- /:таты подпружинены относительно губки и установлены в пазах, выполненных на ее рабочих поверхностях. Продольные оси реостатов лежат в плоскости, перпендикулярной рабочим поверхностям губки. Электропроводная деталь, касаясь поверхности катушек, соединяет различные их участки. Измерительная система измеряет суммарное сопротивление этих участков, которое пропорционально измеряемым геометрическим размерам детали. 3 ил. о (О СО
Составитель С.Грибов
Редактор А.Долинич
Техред М.Ходанич Корректор В.Гирняк
Заказ 6740/17 Тираж 907 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раущская наб., д.4/5
0.
А А
. 2
| Схват | 1977 |
|
SU659377A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| i | |||
