Изобретение относится к области машиностроения, а именно к механическим устройствам ручного управления.
Цель изобретения - упрощение конструкции.
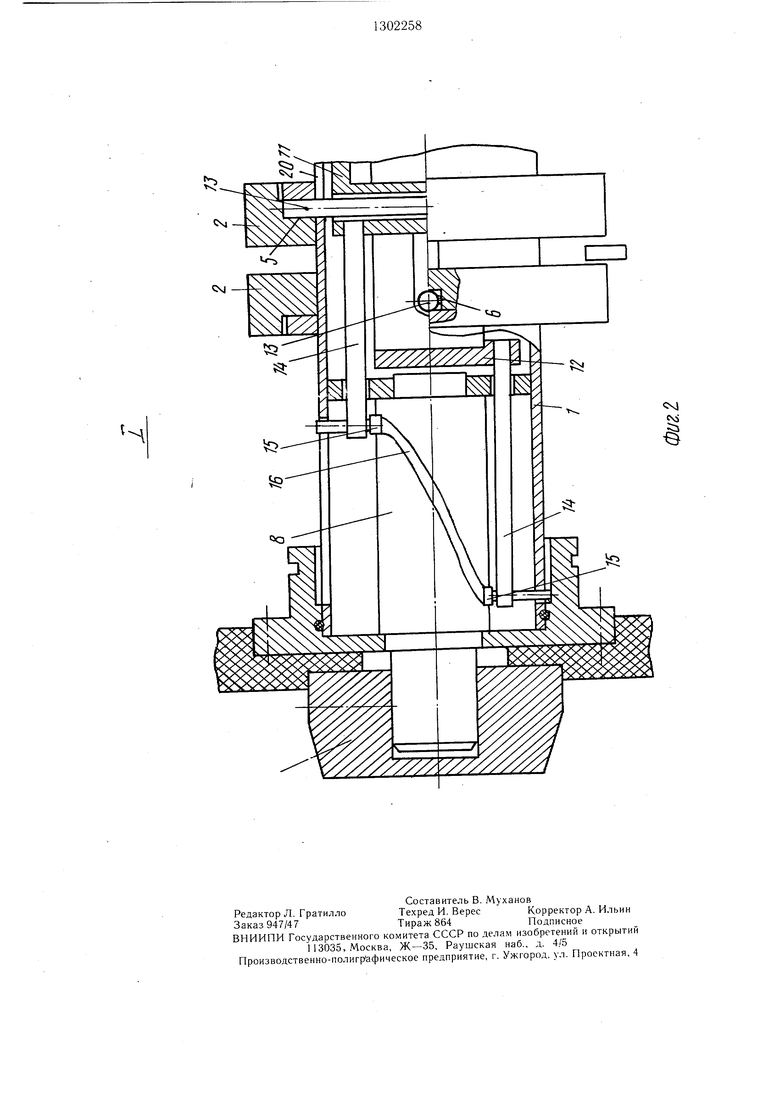
На фиг. 1 изображено устройство, общий вид; на фиг..2 - узел I на фиг. 1.
Механизм управления коробки передач содержит установленные на приводном валу 1 спаренные профильные кулачки 2-4,
которые через тяги 14 соответственно перемещают в противоположные стороны пол- зущки 11 и 12 (ползущка 11 двигается вправо, ползушка 12 - влево). Последние посредством пальцев 13, проходящих через пазы 20 в вале 1, перемещают в противоположные стороны половины кулачков 2-4, т. е. разводят их (фиг. 1). При этом кулачки 2-4 прекращают контактировать с.другими пальцами 19 и коробка передач нромеханизм 5 разведения и сведения кулач- должает работать на прежнем числе обо- ков, механизм 6 поворота кулачков, рычаж- ротов, так как изменения положения рычажной системы 7 не произошло. В то же время прекращение контакта кулачков 2-4 с
пальцами 19 прекращает фиксацию вала 1
ную систему 7 перемещения блоков зубчатых колес (не показаны), сопряженную с кулачками 2-4, установленную на валу 8
управления рукоятку 9 управления, кине- jc от поворота вокруг своей оси при вращении матически связанную с механизмом разве- рукоятки 9 и вал 1 вместе с кулачками 2-4
проворачивается по часовой стрелке до требуемого положения, которое соответствует
включению необходимого- блока зубчатых колес.
дения и сведения кулачков 5 и механизмом 6 поворота кулачков, храповый механизм 10 стопорения приводного вала, связанный с механизмом разведения и сведения кулачков 5, причем приводной вал 1 выполнен по- 20 Затем поворачивают рукоятку 9 по часо- лым, внутри него установлены ползушки 11 вой стрелке. Храповый механизм стопорит
вал 1. Винтовая канавка 16 посредством роликов 15, тяг 14 перемещает ползушки 11
и 12, связанные через пальцы 13 с кулачками 2-4 и кинематически связанные с валом 8 управления. Кинематическая связь
и 12 в обратных направлениях (ползушползушек 11 и 12 с валом 8 управления вы-jc - влево, ползушка 12 - вправо) и. полнена в виде тяг 14, связанных с ползуш-через пальцы 13 сводит профильные кулачками 11 и 12 и через ролики 15 с винтовойки 2-4. При этом лтругие пальцы 19 соот- канавкой 16, выполненной в валу 8 управ-ветствующими выступами 18 кулачков 2-4 ления. Кулачки 2-4 снабжены пазами 17 иперемещаются в положения, соответствую- выступами 18, между которыми размещеныщие новому положению блоков зубчатых другие пальцы 19 рычажной системы 7.30 колес.
Пальцы 13 помещены в пазы 20 приводного вала 1.
Храповый механизм 10 сопряжен с упором на корпусе (не показаны) и стопорит вал 1 при вращении рукоятки 9 по часовой стрелке.
Механизм работает следующим образом.
В исходном положении левые и правые половины профильных кулачков 2-4, сведены. В них соответствующи.м образом ориентированы другие пальцы 19, что обеспечивает включение соответствующих передач. Для переключения передач рукоятку 9 поворачивают против часовой стрелки. Усилие поворота рукоятки 9 через вал 8, канавку 16, ролики 15, тяги 14, пальцы 13, пазы 20 передается валу 1. Но проворот вала 1 пока исключен, так как кулачки 2-4 соответствующими выступами упираются в другие пальцы 19. Таким образом поворот рукоятки 9 приводит к повороту вала 8, который своей винтовой канавкой 16 перемещает ролики 15 в противоположные стороны.
Формула изобретения
Механизм управления коробкой передач, содержащий установленные на приводном
35 валу спаренные профильные кулачки, .механизм разведения и сведения кулачков, механизм поворота кулачков, рычажную систему переключения блоков зубчатых колес, сопряженную с кулачками, установленную на вадр лу управления рукоятку управления и кинематически связанную с механизмо.м разведения и сведения кулачков и .механизмом поворота кулачков, храповый механизм стопорения приводного вала, связанный с механизмом разведения и сведения кулачков, при45 чем приводной вал выполнен полым, внутри него установлены ползушки, связанные через пальцы с кулачками и кине.матически связанные с валом управления, отличающийся те.м, что, с целью упрощения конструкции, кинематическая связь ползушек с валом управления выполнена в виде тяг, связанных с ползушками и через ролики с винтовой канавкой, выполненной на валу управления.
50
которые через тяги 14 соответственно перемещают в противоположные стороны пол- зущки 11 и 12 (ползущка 11 двигается вправо, ползушка 12 - влево). Последние посредством пальцев 13, проходящих через пазы 20 в вале 1, перемещают в противоположные стороны половины кулачков 2-4, т. е. разводят их (фиг. 1). При этом кулачки 2-4 прекращают контактировать с.другими пальцами 19 и коробка передач нро должает работать на прежнем числе обо- ротов, так как изменения положения рычажной системы 7 не произошло. В то же время прекращение контакта кулачков 2-4 с
пальцами 19 прекращает фиксацию вала 1
включению необходимого- блока зубчатых колес.
Затем поворачивают рукоятку 9 по часо- вой стрелке. Храповый механизм стопорит
вал 1. Винтовая канавка 16 посредством роликов 15, тяг 14 перемещает ползушки 11
и 12 в обратных направлениях (ползуш - влево, ползушка 12 - вправо) и. через пальцы 13 сводит профильные кулачки 2-4. При этом лтругие пальцы 19 соот- ветствующими выступами 18 кулачков 2-4 перемещаются в положения, соответствую- щие новому положению блоков зубчатых колес.
Формула изобретения
Механизм управления коробкой передач, содержащий установленные на приводном
валу спаренные профильные кулачки, .механизм разведения и сведения кулачков, механизм поворота кулачков, рычажную систему переключения блоков зубчатых колес, сопряженную с кулачками, установленную на валу управления рукоятку управления и кинематически связанную с механизмо.м разведения и сведения кулачков и .механизмом поворота кулачков, храповый механизм стопорения приводного вала, связанный с механизмом разведения и сведения кулачков, причем приводной вал выполнен полым, внутри него установлены ползушки, связанные через пальцы с кулачками и кине.матически связанные с валом управления, отличающийся те.м, что, с целью упрощения конструкции, кинематическая связь ползушек с валом управления выполнена в виде тяг, связанных с ползушками и через ролики с винтовой канавкой, выполненной на валу управления.
54
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления коробкой передач | 1985 |
|
SU1265751A1 |
| Механизм ручного управления коробкой передач | 1984 |
|
SU1223214A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2147701C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| Грейферное подающее устройство к прессу | 1989 |
|
SU1676724A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| Станок для профильной заточки пил | 1979 |
|
SU803257A1 |
| Машина для теребления льна | 1930 |
|
SU25792A1 |
Изобретение относится к устройствам ручного управления. Цель изобретения - упрощение конструкции. Механизм управления коробкой передач содержит приводной вал I, спаренные профильные кулачки 2-4, .механизм разведения и сведения кулачков, механизм поворота кулачков, рычажную систему 7 перемещения блоков зубчатых колес, рукоятку 9 управления, ползуп - ки И, 12. вал 8 управления. Упрощение, конструкции обеспечивается тем, что кинематическая связь иолзу1иек с валом уиравлеиия выполнена в виде тяг 14, связанных с пол- зуп1ками и через ролики с винтовой канавкой 16 в валу управления. 2 ил. (О оз о го rsD 01 оо Фиг.1
| Колев Н | |||
| С | |||
| и др | |||
| Металлорежущие станки | |||
| М.: Машиностроение, 1980, с | |||
| Газогенератор для дров, торфа и кизяка | 1921 |
|
SU376A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧЕРТЕЖЕЙ ДЛЯ ОДНООБРАЗНОЙ РАСКРОЙКИ ПРЕДМЕТОВ ОДЕЖДЫ | 1919 |
|
SU287A1 |
| Механизм управления коробкой передач | 1985 |
|
SU1265751A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
