связи механизма перемещения ножевого захвата с корпусом бункера. Это достигается тем, что при движении цепного конвейера его ролики взаимодействуют с ведущей кареткой 5 и поднимают ее. При перемещении вверх каретки 5, вследствие кинематической связи .шестерни 18 с неподвижными рейками 7 и рейками 13, ведомая каретка 4 также пе- ;ремещается вверх со скоростью в два ра- 1 за больше скорости ведущей каретки 5, Ножевой захват, захватывая детали.
1303367
ориентирует их и подает до уровня
ся вследствие остановки каретки.5 время, равное времени прохождения ликами цепного конвейера горизонта ного участка 24. Из крайнего верхн положения ножевой захват возвращае ся в исходное положение вместе с в домой кареткой 4 со скоростью в дв раза больше скорости ведущей карет ки 5 . 6 ил .
1
Изобретение относится к загрузочным устройствам обрабатывающих машин и может быть применено в станкостроении при создании роботизированнь х комплексов. ,
Целью изобретения являемся повышение надежности работы устрЪйства и уменьшение высоты бункера за счет обеспечения выстоя ножевого захвата в верхнем положении без отключения привода и кинематической связи механизма перемещения ножевого захвата с корпусом бункера.
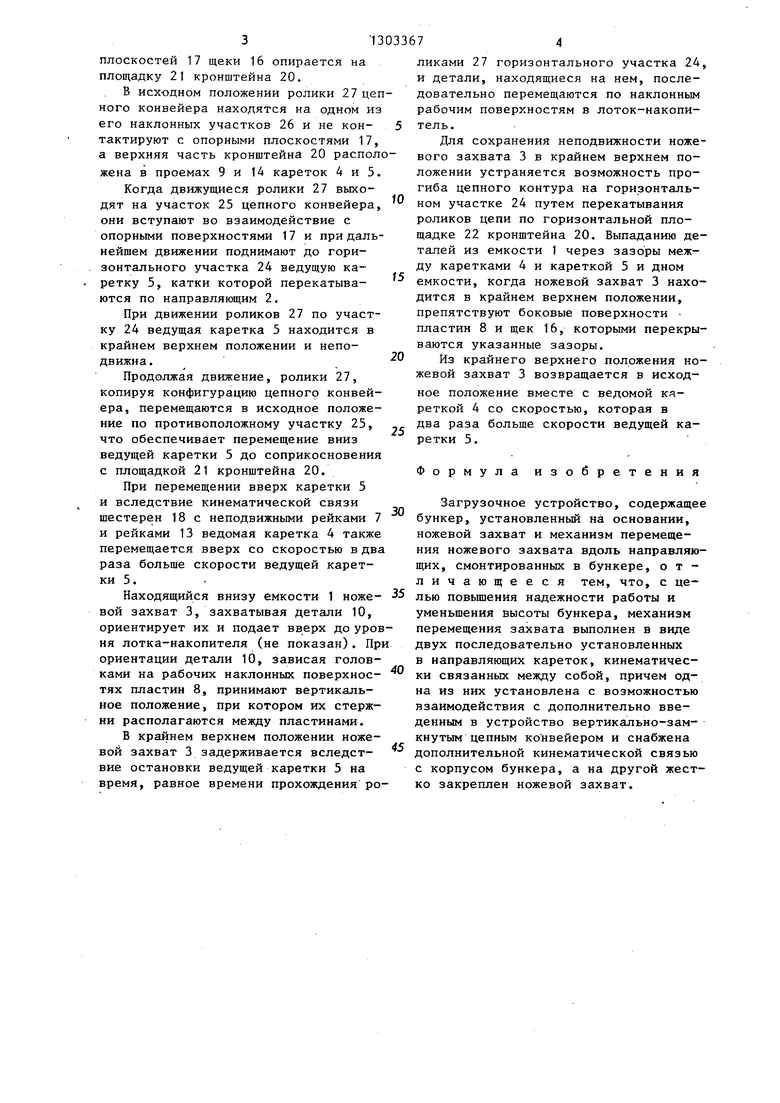
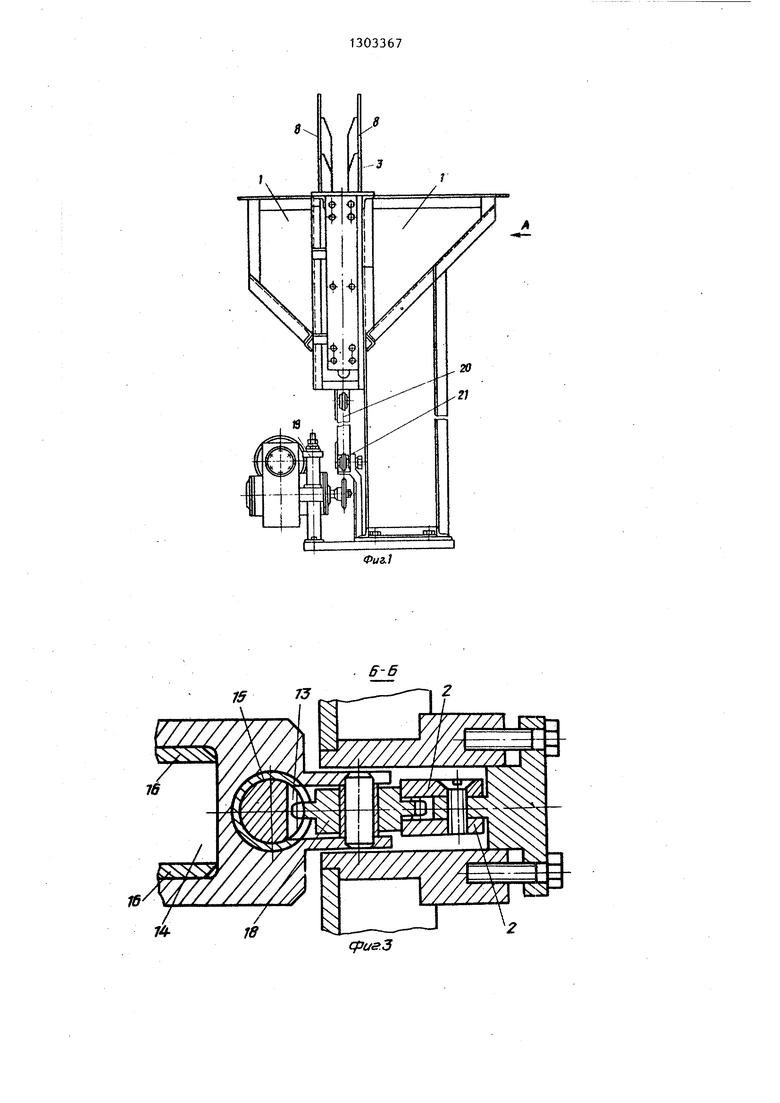
На фиг. 1 изображено загрузочное устройство, продольный разрез; на фиг. 2 - вид А на фиг. 1j на фиг.З - разрез Б-Б на фиг. 2| на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5. - разрез Г-Г на фиг. 2; на фиг. 6 - положение сориентированной детали.
Заг зочное устройство содержит бункер, выполненный в виде емкости 1 направляющие 2, ножевой захват 3, перемещающийся с помощью механизма перемещения ножевого захвата, состоящего из ведомой каретки 4, ведущей каретки 5, а также привод 6.
Направляющие 2 установлены на неподвижных рейках 7, которые крепятся на емкости 1. Ножевой захват 3, выполненный в виде двух параллельных пластин 8, рабочие поверхности которых расположены под углом к горизонтальной цпоскости, закреплен на ведомой каретке 4 с проемом 9. Расстояние между пластинами 8 больше диаметра стержня детали 10 и меньше диаметра ее головки.
ся вследствие остановки каретки.5 на i время, равное времени прохождения роликами цепного конвейера горизонтального участка 24. Из крайнего верхнего положения ножевой захват возвращается в исходное положение вместе с ведомой кареткой 4 со скоростью в два раза больше скорости ведущей каретки 5 . 6 ил .
5
5
0
35
На ведомой каретке 4 смонтированы катки 11, контактирующие с направляю- щими 2 и скалками 12, на наружной поверхности которых нарезаны рейки 13.
На корпусе ведущей каретки 5, который имеет проем 14 и отверстия для перемещения во втулках 15 скалок 12, установлены две параллельные щеки 16 с опорными плоскостями 17 и две шестерни 18, находящиеся в кинематической связи с рейками 7 и 13. Ступицы шестерен 18 являются катками для перемещения ведущей каретки 5 по направляющим 2.
Привод 6, состоящий из электродвигателя и редуктора, с помощью вертикальных стоек 19 смонтирован на кронштейне 20 .с горизонтальными площадками 21 и 22 и звездочками 23 кинемати- чески связан с безре;версивным цепным горизонтально замкнутым цепным конвейером. Размер кронштейна 20 с звез- дочками 23 в плане меньше расстояния между щеками 16 и проемами 9 и 14,
Горизонтально замкнутый цепной конвейер имеет горизонтальные 24, вертикальные 25 и наклонные 26 участ- ки, а цепь снабжена консольно установленными роликами 27, взаимодействующими при работе с опорными плоскостями 17.
Загрузочное устройство работает следующим образом.
В исходном положении привод 6 включен, ведомая 4 и ведущая 5 каретки находятся внизу и неподвижны.
При этом каретка 4 покоится на каретке 5, которая одной из опорных
плоскостей 17 щеки 16 опирается на площадку 21 кронштейна 20,
В исходном положении ролики 27 цепного конвейера находятся на одном из его наклонных участков 26 и не кон- тактируют с опорными плоскостями 17, а верхняя часть кронштейна 20 расположена в проемах 9 и 14 кареток 4 и 5.
Когда движущиеся ролики 27 выходят на участок 25 цепного конвейера, они вступают во взаимодействие с опорными поверхностями 17 и при дальнейшем движении поднимают до горизонтального участка 24 ведущую каретку 5, катки которой перекатываются по направляющим 2.
При движении роликов 27 по участку 24 ведущая каретка 5 находится в крайнем верхнем положении и неподвижна.
Продолжая движение, ролики 27, копируя конфигурацию цепного конвейера, перемещаются в исходное положение по противоположному участку 25, что обеспечивает перемещение вниз ведущей каретки 5 до соприкосновения с площадкой 21 кронштейна 20.
При перемещении вверх каретки 5 и вследствие кинематической связи шестерен 18 с неподвижными рейками 7 и рейками 13 ведомая каретка 4 также перемещается вверх со скоростью в два раза больше скорости ведущей каретки 5.
Находящийся внизу емкости 1 ноже- вой захват 3, захватывая детали 10, ориентирует их и подает вверх до уровня лотка-накопителя (не показан). Пр ориентации детали 10, зависая головками на рабочих наклонных поверхностях пластин 8, принимают вертикальное положение, при котором их стержни располагаются между пластинами.
В крайнем верхнем положении ножевой захват 3 задерживается вследствие остановки ведущей каретки 5 на время, равное времени прохождения ро
ю
15
5З0
5
30
0
45
ликами 27 горизонтального участка 24, и детали, находящиеся на нем, последовательно перемещаются по наклонным рабочим поверхностям в лоток-накопитель.
Для сохранения неподвижности ножевого захвата 3 в крайнем верхнем положении устраняется возможность прогиба цепного контура на горизонтальном участке 24 путем перекатывания роликов цепи по горизонтальной площадке 22 кронштейна 20. Выпаданию деталей из емкости 1 через зазоры между каретками 4 и кареткой 5 и дном емкости, когда ножевой захват 3 находится в крайнем верхнем положении, препятствуют боковые поверхности пластин 8 и щек 16, которыми перекрываются указанные зазоры.
Из крайнего верхнего положения ножевой захват 3 возвращается в исходное положение вместе с ведомой кареткой 4 со скоростью, которая в два раза больше скорости ведущей каретки 5.
Формула изобретения
Загрузочное устройство, содержащее бункер, установленный на основании, ножевой захват и механизм перемещения ножевого захвата вдоль направляющих, смонтированных в бункере, отличающееся тем, что, с целью повышения надежности работы и уменьшения высоты бункера, механизм перемещения захвата выполнен в виде двух последовательно установленных в направляющих кареток, кинематически связанных между собой, причем одна из них установлена с возможностью взаимодействия с дополнительно введенным в устройство вертикально-замкнутым цепным конвейером и снабжена дополнительной кинематической связью с корпусом бункера, а на другой жестко закреплен ножевой захват.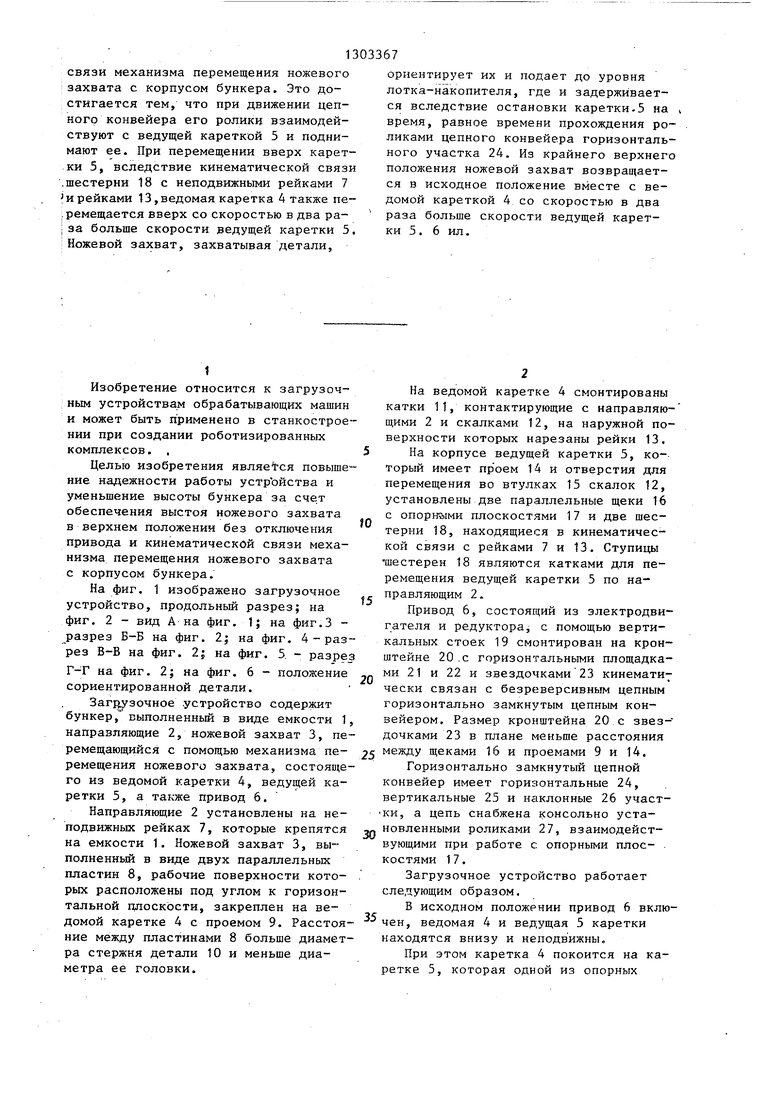
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления деталей и отходов из пресса | 1981 |
|
SU1054101A1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2016 |
|
RU2628797C1 |
| Машина для обработки стеклоизделий | 1977 |
|
SU941324A1 |
| МАШИНА ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ КОЖ | 1991 |
|
RU2019566C1 |
| Устройство для поштучной подачи эластичных колец | 1990 |
|
SU1798262A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ (ВАРИАНТЫ) | 2021 |
|
RU2756122C1 |
| Устройство для получения изделий из листового винипласта | 1960 |
|
SU139075A1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1980 |
|
SU967929A1 |
| Устройство опрокидывания контейнеров для разгрузки | 1987 |
|
SU1498679A1 |
| Скороморозильный аппарат | 1989 |
|
SU1735685A1 |
Изобретение относится к загрузочным устройствам обрабатывающих машин и может быть применено в станкостроении при создании.роботизированных комплексов. Целью изобретения является повышение надежности работы устройства и уменьшение высоты бункера за счет обеспечения выстоя ножевого захвата в верхнем положении без отключения привода и кинематической М S (Л гг 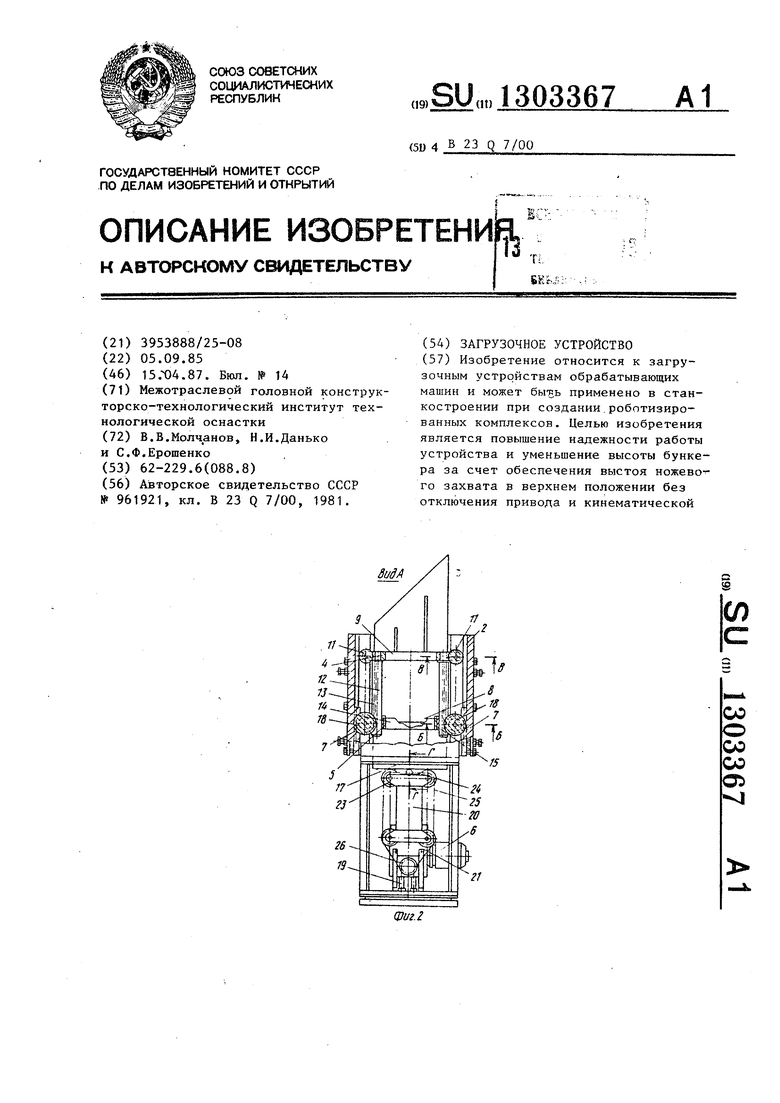
cpus.3
(рие.4сри&.б
cffus.5
| Устройство для выдачи ступенчатых цилиндрических заготовок | 1981 |
|
SU961921A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
