1303371
ной плоскости конвейеров, отстоящихтакже заполнение последних пустыми на расстоянии друг от друга, равномспутниками освободившихся секций 7, шагу расположения секций 7 в кассетах.Затем с-помощью П-образного захвата Посредством указанного механизма про-пустые кассеты 7 подаются в накопи- изводится подача спутников 8 из кас-тель. Далее цикл повторяется, 1 з.п. сет 4 с изделиями на обработку, аф-лы, 3 ил.
1
Изобретение относится к машино- Механизмы вертикального перемеще- строению и предназначено для автома- ния кассет 4 установлены под каждым тизации загрузочно-разгрузочных one- накопителем. Один из механизмов пред- раций в технологических агрегатах. назначен для отделения кассет 4 от
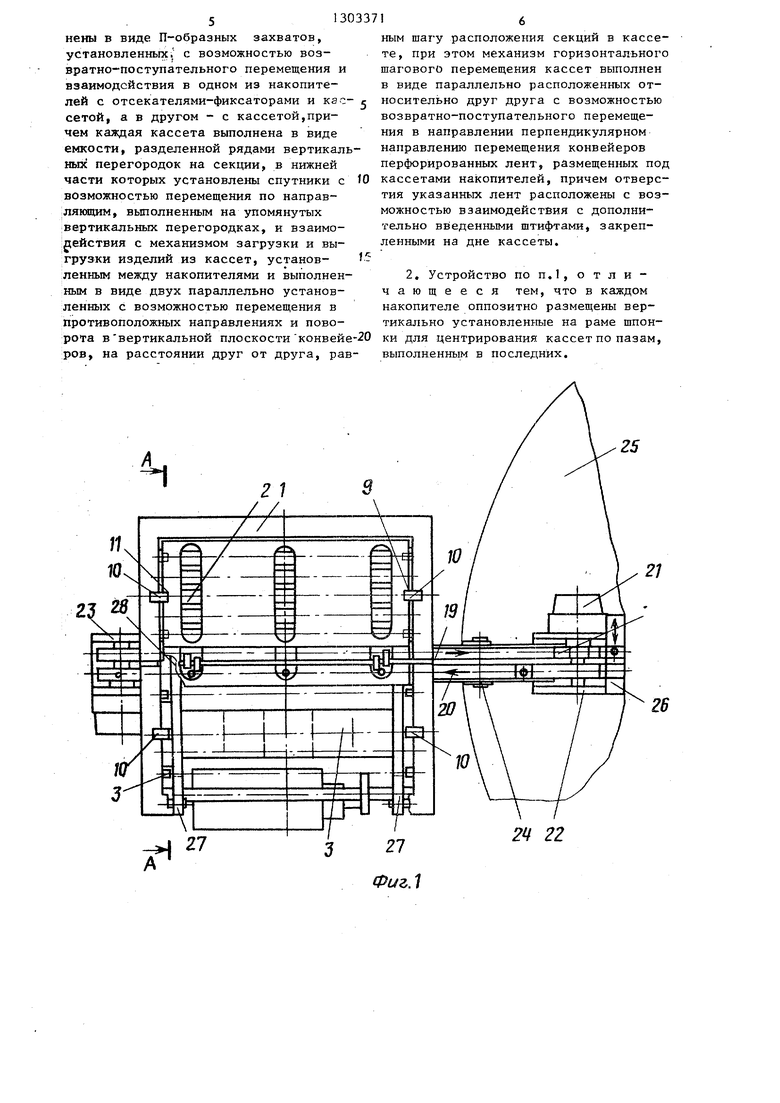
Целью изобретения является, расши- 5 штабеля-накопителя 3, а другой - для рение функциональных возможностей присоединения кассет к штабелю-нако- устройства путем обеспечения хране- пителю 3. Указанные механизмы содер- ния легкодеформируемык изделий в кас- жат пневмоцилиндры 14, на штоках 15 сетах на спутниках и загрузки и вы- которых размещены П-образные захваты грузки их посредством конвейеров,свя- 16 и 17с закрепленными на них в ниж- занных с зоной обработки.ней части направляющими скалками 18.
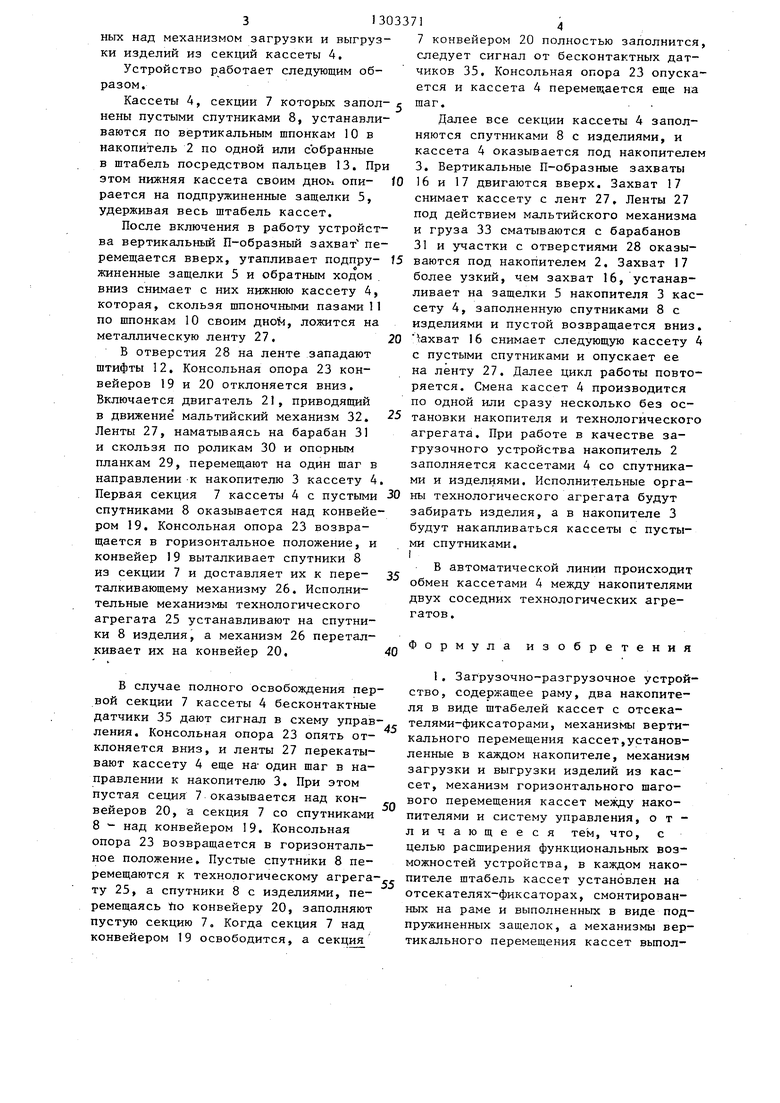
На фиг.1 показано устройство, об- Причем в механизме вертикального пе- щкй вид; на фиг.2 - разрез А-А на ремещения, размещенном под накопите- фиг.2; на фиг.З - разрез Б-Б на фиг.2. лем 2, П-образный захват 16 установУстройство содержит раму , на ко- с возможностью взаимодействия с торой смонтированы два накопителя 2 кассетой 4 и подпружиненными защелка- и 3 в виде штабелей кассет 4 с отсе- ми 5, а в другом механизме П-образный кателями-фиксаторами, выполненными в захват 17 установлен с возможностью виде подпружиненных защелок 5 (щта- взаимодействия только с кассетами 4. бель кассеты в накопителе 3 не пока- Механизм загрузки и выгрузки раз- зан) , механизмы вертикального переме- Щ У накопителями 2 и 3 кассет щения кассет, механизм загрузки и вы- - содержит два параллельно установ- грузки изделий из кассет, механизм ленных ковейера 19 и 20 с приводами горизонтального шагового перемещения 25° гателя 21, неподвижную опору кассет и систему управления. , 22 и-консольную опору 23. Консольная
Каждая кассета 4 штабеля вьтолнена 3 установлена с возможностью в виде емкости, разделенной верти- УГЛОВОГО поворота вокруг оси 24 по- кальными перегородками 6 на секции 7, средством дополнительного пневмоди- в нижней части которых установлены линдра (не показано). Неподвижная спутники 8 с возможностью перемещения опора 22 установлена на столе техно- по направляющим 9, выполненным на логического агрегата 25, на котором упомянутых вертикальных перегородках. смонтирован переталкивающий механизм 26.
В каждом накопителе на раме 1 оп- Механизм горизонтального шагового позитно размещены вертикально установ- 35перемещения кассет 4 установлен пер- ленные шпонки 10 для центрирования пендикулярно направлению перемещения кассет 4 по пазам 11, выполненным в указанных конвейеров 9 и 20 под шта- последних. На дне кассеты 4 с шагом, белями кассет 4 и содержит две метал- равным шагу расположения секций в кас- лические ленты 27 с отверстиями 28, сете, закреплены штифты 12. На углах опорные планки 29, ролики 30, бара- верхней части кассеты 4 закреплены баны 31, мальтийский механизм 32,груз установленные палыры 13, предназна- ЗЗ и двигатель с редуктором 34. Сиг- ченные для базирования кассет 4 в . налы в систему управления подаются от штабеле .. бесконтактных датчиков 35, размещенных над механизмом загрузки и выгруз ки изделий из секций кассеты 4,
Устройство работает следующим образом.
Кассеты 4, секции 7 которых запол
иены пустыми спутниками 8, устанавливаются по вертикальным шпонкам 10 в накопитель 2 по одной или собранные в штабель посредством пальцев 13, Пр этом нижняя кассета своим дном опи- рается на подпружиненные защелки 5, удерживая весь штабель кассет.
После включения в работу устройства вертикальный П-образный захват перемещается вверх, утапливает подпру- жиненнБЮ защелки 5 и обратным ходом вниз снимает с них нижнюю кассету 4, которая, скользя шпоночными пазами 1 по шпонкам 10 своим дно м, ложится на металлическую ленту 27,
В отверстия 28 на ленте западают штифты 12, Консольная опора 23 конвейеров 19 и 20 отклоняется вниз. Включается двигатель 21, приводящий в движение мальтийский механизм 32, Ленты 27, наматываясь на барабан 31 и скользя по роликам 30 и опорным планкам 29, перемещают на один шаг в направлении-к накопителю 3 кассету 4 Первая секция 7 кассеты 4 с пустыми спутниками 8 оказывается над конвейером 19, Консольная опора 23 возвращается в горизонтальное положение, и конвейер 19 выталкивает спутники 8 из секции 7 и доставляет их к пере- талкивающему механизму 26, Исполнительные механизмы технологического агрегата 25 устанавливают на спутники 8 изделия, а механизм 26 переталкивает их на конвейер 20,
В случае полного освобождения первой секции 7 кассеты 4 бесконтактные датчики 35 дают сигнал в схему управления. Консольная опора 23 опять отклоняется вниз, и ленты 27 перекатывают кассету 4 еще на- один шаг в направлении к накопителю 3, При этом пустая сеция 7 оказывается над конвейеров 20, а секция 7 со спутниками 8 - над конвейером 19, Консольная опора 23 возвращается в горизонтальное положение. Пустые спутники 8 перемещаются к технологическому агрега ту 25, а спутники 8 с изделиями, перемещаясь tio конвейеру 20, заполняют пустую секцию 7. Когда секция 7 над конвейером 19 освободится, а секция
3033714
7 конвейером 20 полностью заполнится, следует сигнал от бесконтактных датчиков 35. Консольная опора 23 опускается и кассета 4 перемещается еще на
O
5 0
5 0 5 0
,
0
Далее все секции кассеты 4 заполняются спутниками 8 с изделиями, и кассета 4 оказывается под накопителем 3, Вертикальные П-образные захваты 16 и 17 двигаются вверх. Захват 17 снимает кассету с лент 27, Ленты 27 под действием мальтийского механизма и груза 33 сматываются с барабанов 31 и участки с отверстиями 28 оказываются под накопителем 2, Захват 17 более узкий, чем захват 16, устанавливает на защелки 5 накопителя 3 кассету 4, заполненную спутниками 8 с изделиями и пустой возвращается вниз, Чахват 16 снимает следующую кассету 4 с пустыми спутниками и опускает ее на ленту 27, Далее цикл работы повторяется. Смена кассет 4 производится по одной или сразу несколько без остановки накопителя и технологического агрегата. При работе в качестве загрузочного устройства накопитель 2 заполняется кассетами 4 со спутниками и изделиями. Исполнительные органы технологического агрегата будут забирать изделия, а в накопителе 3 будут накапливаться кассеты с пустыми спутниками, I
В автоматической линии происходит обмен кассетами 4 между накопителями двух соседних технологических агрегатов.
Формула изобретения
1, Загрузочно-разгрузочное устройство, содержащее раму, два накопителя в виде штабелей кассет с отсека- телями-фиксаторами, механизмы вертикального перемещения кассет,установленные в каждом накопителе, механизм загрузки и выгрузки изделий из кассет, механизм горизонтального шагового перемещения кассет между накопителями и систему управления, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в каждом накопителе штабель кассет установлен на отсекателях-фиксаторах, смонтированных на раме и выполненньгх в виде подпружиненных защелок, а механизмы вертикального перемещения кассет выпол513033
йены в виде П-образных захватов, установленных с возможностью возвратно-поступательного перемещения и взаимодействия в одном из накопителей с отсекателями-фиксаторами и кас- с сетой, а в другом - с кассетой,причем каждая кассета выполнена в виде емкости, разделенной рядами вертикальных перегородок на секции, в нижней части которых установлены спутники с W возможностью перемещения по направ- ляннцим, вьшолненным на упомянутых вертикальных перегородках, к взаимодействия с механизмом загрузки и выгрузки изделий из кассет, установ- - ленным между накопителями и выполненным в виде двух параллельно установленных с возможностью перемещения в противоположных направлениях и поворота в вертикальной плоскости конвейе-20 ров, на расстоянии друг от друга, рав16
ным шагу расположения секций в кассете , при этом механизм горизонтального шагового перемещения кассет выполнен в виде параллельно расположенных относительно друг друга с возможностью возвратно-поступательного перемещения в направлении перпендикулярном направлению перемещения конвейеров перфорированных лент, размещенных под кассетами накопителей, причем отверстия указанных лент расположены с возможностью взаимодействия с дополнительно введенными штифтами, закрепленными на дне кассеты.
2, Устройство по п.1, отличающееся тем, что в каждом накопителе оппозитно размещены вертикально установленные на раме шпонки для центрирования кассет по пазам, выполненным в последних.
25
2Ц 22
;к
Я% а Х $$5 Х ДХХХсКбб ;СХ К55д ОФР99Ж
а
18
Фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-накопительная система | 1985 |
|
SU1342693A1 |
| СБОРОЧНАЯ ЛИНИЯ | 1991 |
|
RU2028910C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ КОМПЛЕКСА ТЕРМООБРАБОТКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2013 |
|
RU2526572C1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| Накопитель-перегрузчик кассет | 1984 |
|
SU1197819A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| Роликовый конвейер для автоматических линий | 1984 |
|
SU1257023A1 |
| КОНВЕЙЕРНАЯ ЛИНИЯ ТЕПЛОВЛАЖНОСТНОЙ ОБРАБОТКИ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ | 1992 |
|
RU2038974C1 |
Изобретение относится к области машиностроения и предназначено для автоматизации загрузочно-разгруэочных операций в технологических агрегатах. Целью изобретения является расширение функциональных возможностей устройства путем обеспечения хранения легкодеформируемых изделий в кассетах на А-А Йти ных ах. ние стоа спутниках и загрузки и выгрузки их .посредством конвейеров, связанных с зоной обработки. Для этого кассеты 4 с размещенными в их секциях 7 спутниками 8 с изделиями загружаются в накопитель, а затем посредством механизма вертикального перемещения кассет поочередно выдаются на механизм горизонтального перемещения последних, вьтолненный в виде двух перфорированных лент 27, установленных с возможностью возвратно-поступательного перемещения. Кассеты 4 перемещаются к механизму загрузки и выгрузки изделий из кассет, выполненному в виде двух параллельно смонтированных с возможностью перемещения в противоположных направлениях и поворота в вертикальА-А § (Л СлЭ о со со 
Редактор А.Гулько
Составитель В.Комаров
ТехредМ.Ходаннч Корректор М.Пожо
Заказ 1255/17Тираж 787 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
™ ™ ™ ™ - - - - ™ -- -- ----- --------------.--«.
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Загрузочно-разгрузочное устройство | 1984 |
|
SU1172672A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
