-v| Ю
Од
sl
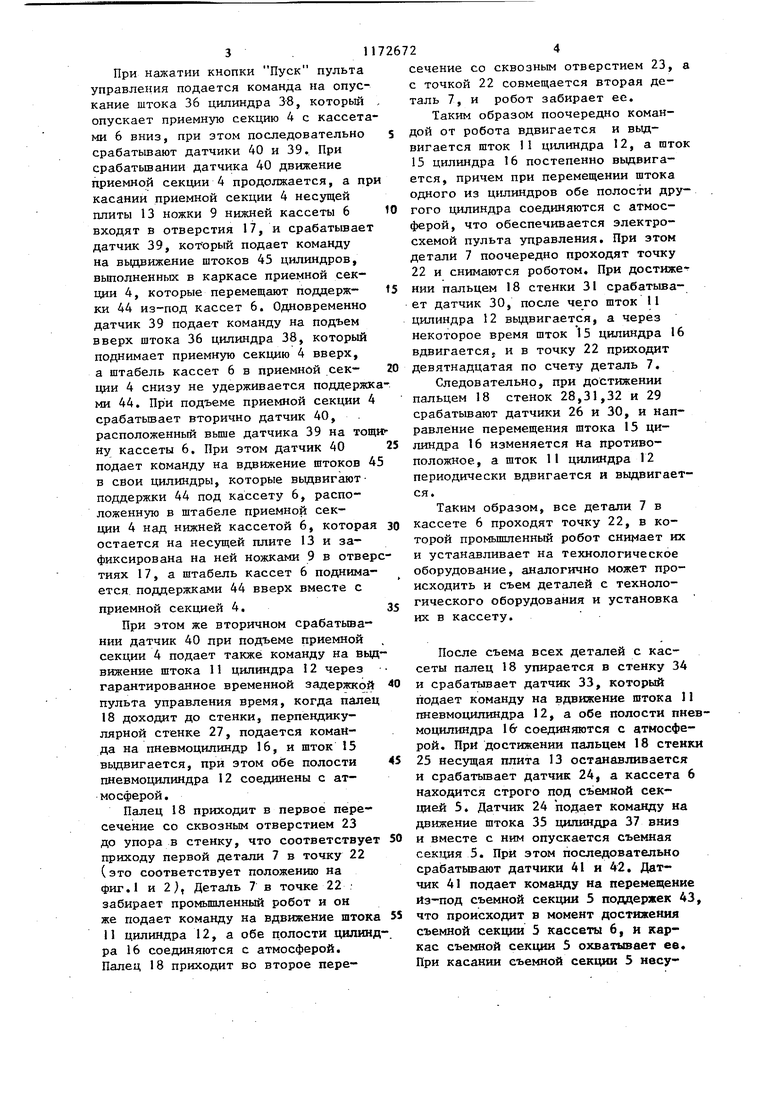
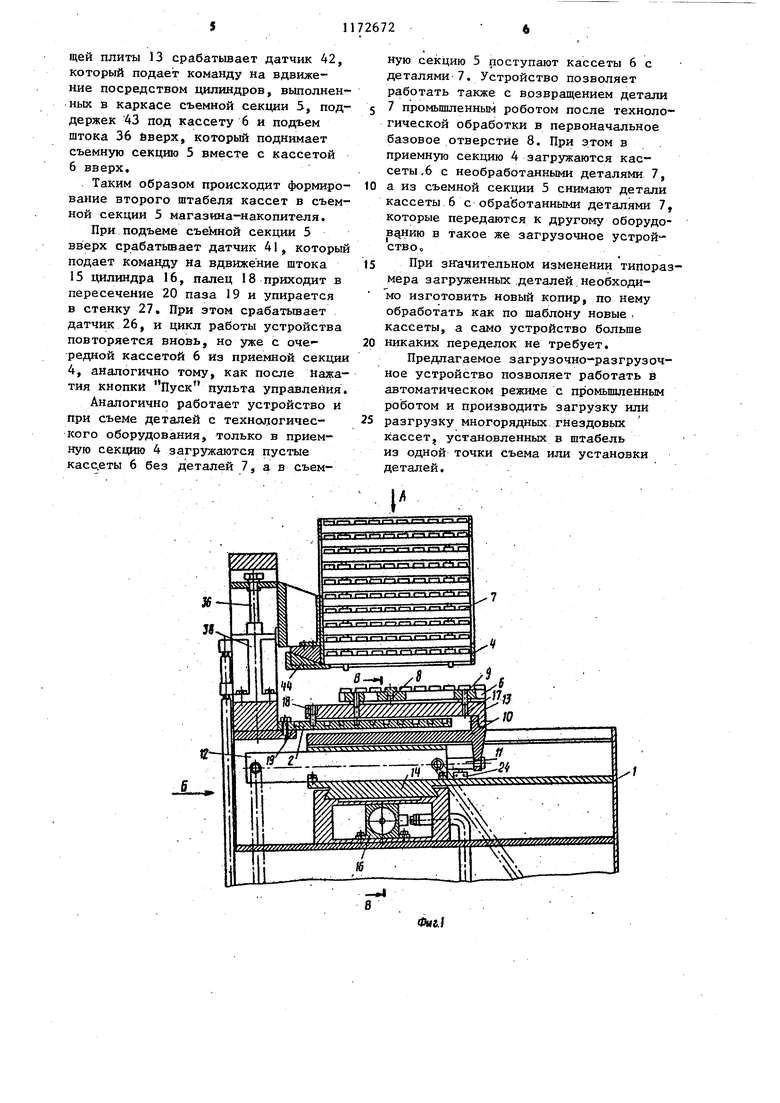
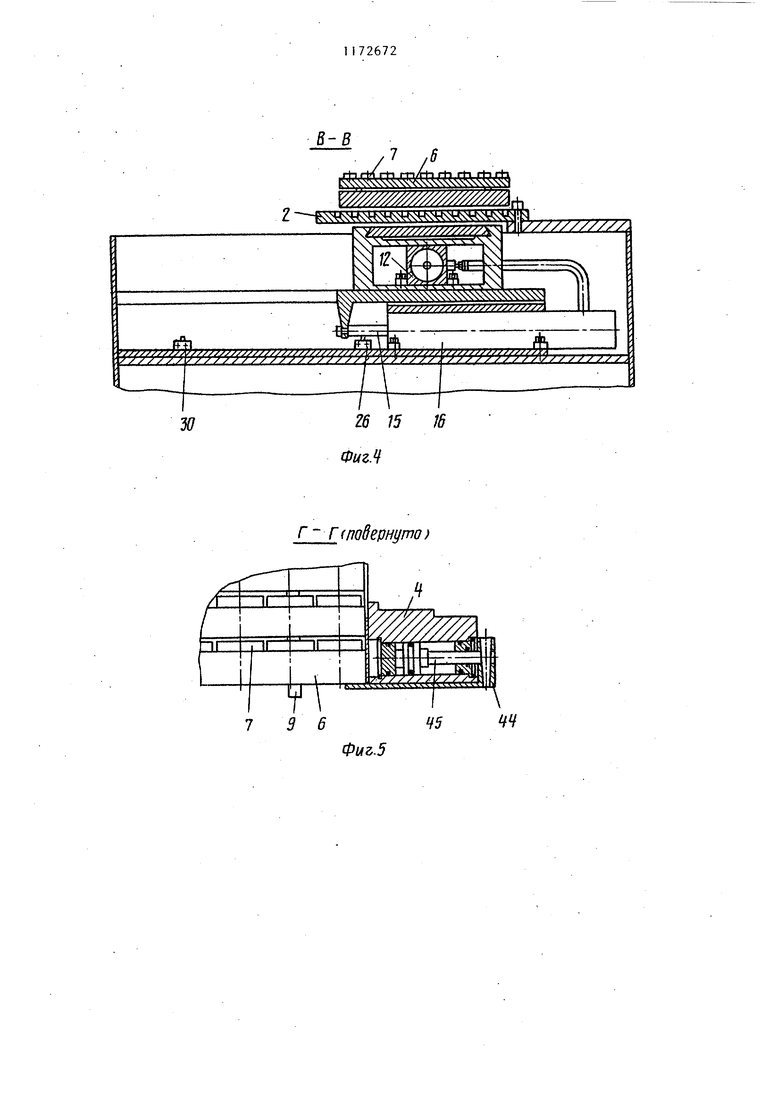
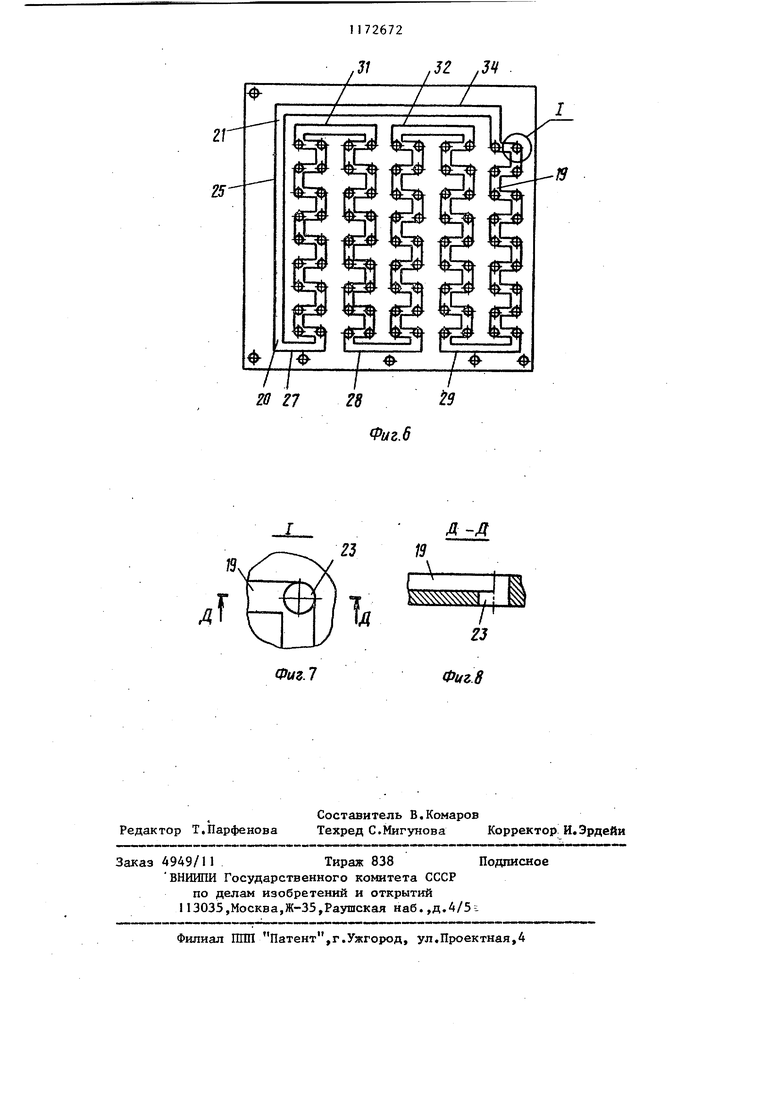
1C 1 Изобретение относится к автомати зации производственных процессов и может найти широкое применение з загрузочных устройствах с использов нием промышленных роботов во всех отраслях народного хозяйства при создании гибких автоматических комп лексов. Цель изобретения - расширение технологических возможностей устройства путем обеспечения поочередного позиционирования ячеек многорядной кассеты в одной точке съема или установки деталей. На фиг.1 изображено устройство, общий вид, в разрезе; на фиг.2 вид А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 - разрез В-В на фиг.1I на фиг.5 - разрез Г-Г на фиг.2; на фиг.6 - копир; на фиг.7 узел Т на фиг.6; на фиг.З - разрез Д-Д на фиг.7. Устройство содержит корпус 1, на котором закреплены копир 2, направляющие 3. На направляющих 3 уста новлен с возможностью вертикального перемещения магазин-накопитель, состоящий из двух идентичных секций приемной секции 4 и съемной секции 5, В приемной секции 4 установлены один над другим в виде штабеля кассеты 6 с детялами 7, снабженные баз выми отверстиями 8 ячеек ( в данном случае только базовые отверстия без ячеек ) и ножками 9. Иод секциями 4 и 5 над копиром 2 установлена на направляющих 10, связанньос со штоком 11 пневмоцилиндра 12, несупия плита 13. Пневмо цилиндр 12 в свою очередь закреплен на направляющей 14, перпендикулярно направляющей Ю и связанной со щтоком 15 пневмоцилиндра 16, закрепленного на корпусе 1 , Несущая плита 13 снабжена отверстиями 17 для фиксации ножек 9 кассеты 6 и пальцем 18, усталовленньм с возможностью . перемещения по замкнутому, зигзагообразному с перпендикулярными учас ками пазу 19 копира 2. Копир 2 фиксирует плиту 13 при упоре пальца 18 в стенку паза в следующих точках: в точке установ ки на плиту 13 кассеты 6 с деталями 7 из Приемной секции 4, что соот- ветствует пересечению 20 перпендику лярных участков паза 19; в точке удаления кассеты 6 в съемную секци 72 что соответствует пересечению 21 паза 19, а также обеспечивает поочередное позиционирование всех базовых отверстий 8 кассеты 6 в точке 22, что соответствует пересечениям перпендикулярных участков паза 19, в которых вьтолнены сквозные отверстия 23. По отверстиям 23 обработаны базовые отверстия 8 кассет 6. Шток 11 пневмоцилиндра 12 взаимодейств.ует с датчиком 24 при достижении пальцем 18 стенки 25 паза 19, шток 15 взаимодействует с датчиком 26 при касании 1 пальцем 18 стенок паза 19,, шток 15 взаимодействует с датчиком 30 при касании пальцем 18 стенок 31 и 32, ас датчиком 33 - при касании пальцем 18 стенки 34 паза 19. Датчики 24,26,30 и 33 закреплены жестко на корпусе 1. Секции 4 и 5 жестко связаны соответственно штоками 35 и 36 с силовыми цилиндрами вертикального перемещения 37 и 38, закрепленными на корпусе 1. На корпусе I установлено также по два датчика положения на каждую секцию 4и 5. Приемная секция 4 установлена с возможностью взаимодействия с датчиками 39 и 40, а съемная секция 5- с датчиками 41 и 42. Секции 4 и 5 снабжены также Поддержками 43 и 44 соответственно, удерживающими сниз/ кассеты 6 в магазине-накопителе. Поддержки 43 и 44 установлены на штоках 45 пневмоцилиндров, вьшолненных в каркасе секции 4 и 5, что обеспечивает возможность перемещения поддержек из-под кассет 6, Датчики 39 и 40, 41 и 42 расположены по высоте на расстоянии, равном толщине кассеты 6, при этом датчики 39 и 41 обеспечивают вьшод поддержек 44 и 43 соответственно из-под кассет 6, а датчики 40 и 42 - ввод ш под кассеты 6. Последовательность работы механизмов устройства обеспечивается электропультом управления (не показан ), Устройство работает следующим образом. . Кассеты 6 с деталями 7 устанавливаются в виде штабеля в приемную секцию 4 на вьщвинутые поддержки 44. Секции 4 и 5 подняты вверх, несущая плита 13 находится под приемной секцией 4, а палец 18 находится в пересечении 20, упираясь в стенку 27 копира 2.
При нажатии кнопки Пуск пульта управления подается команда на опускание штока 36 цилиндра 38, который опускает приемную секцию 4 с кассетами 6 вниз, при этом последовательно срабатьшают датчики 40 и 39. При срабатьшании датчика 40 движение приемной секции 4 продолжается, а при касании приемной секции 4 несущей плиты 13 ножки 9 нижней кассеты 6 входят в отверстия 17, и срабатьшает датчик 39, который подает команду на выдвижение штоков 45 цилиндров, выполненных в каркасе приемной секции 4, которые перемещают подцержки 44 из-под кассет 6. Одновременно датчик 39 подает команду на подъем вверх штока 36 цилиндра 38, который поднимает приемную секцию 4 вверх, а штабель кассет 6 в приемной сек- ции 4 снизу не удерживается поддержками 44. При подъеме приемной секции 4 срабатьшает вторично датчик 40, . расположенный вьпие датчика 39 на кассеты 6. При этом датчик 40 подает команду на вдвижение штоков 45 в свои цилиндры, которые вьщвигаютподдержки 44 под кассету 6, расположенную в штабеле приемной секции 4 над нижней кассетой 6, которая остается на несущей плите 13 и зафиксирована на ней ножками 9 в отверстиях 17, а штабель кассет 6 поднимается поддержками 44 вверх вместе с
приемной секцией 4,
При этом же вторичном срабатьшании датчик 40 при подъеме приемной секции 4 подает также команду на выдвижение штока 11 цилиндра 12 через гарантированное временной задержкой пульта управления время, когда палец 18 доходит до стенки, перпендикулярной стенке 27, подается команда на пневмоцилиндр 16, и шток 15 выдвигается, при этом обе полости пневмоцилиндра 12 соединены с атмосферой.
Палец 18 приходит в первое пересечение со сквозным отверстием 23 до упора в стенку, что соответствует приходу первой детали 7 в точку 22 (это соответствует положению на фиг.1 и 2), Деталь 7 в точке 22 забирает промьшшенный робот и он же подает команду на вдвижение штока 11 цилиндра 12, а обе полости цилиндра 16 соединяются с атмосферой. Палец 18 приходит во второе пересечение со сквозным отверстием 23, а с точкой 22 совмещается вторая деталь 7, и робот забирает ее.
Таким образом поочередно командой от робота вдвигается и выдвигается шток 11 цилиндра 12, а шток 15 цилиндра 16 постепенно выдвигается, причем при перемещении штока одного из цилиндров обе полости другого цилиндра соединяются с атмосферой, что обеспечивается электросхемой пульта управления. При этом детали 7 поочередно проходят точку 22 и снимаются роботом. При достижеНИИ пальцем 18 стенки 31 срабатьшает датчик 30, после чего шток 11 цилиндра 12 выдвигается, а через некоторое время шток 15 цилиндра 16 вдвигается; и в точку 22 приходит девятнадцатая по счету деталь 7.
Следовательно, при достижении пальцем 18 стенок 28,31,32 и 29 срабатьшают датчики 26 и 30, и направление перемещения штока 15 цилиндра 16 изменяется на противоположное, а шток 11 цилиндра 12 периодически вдвигается и выдвигается.
Таким образом, все детали 7 в кассете 6 проходят точку 22, в которой промьшшенный робот снимает их и устанавливает на технологическое оборудование, аналогично может происходить и съем деталей с технологического оборудования и установка их в кассету.
После съема всех деталей с кассеты палец 18 упирается в стенку 34 и срабатывает датчик 33, который подает команду на вдвижение штока 11 пневмоцилиндра 12, а обе полости пнемоцилиндра 16f соединяются с атмосферой. При достижении пальцем 18 стенк 25 несущая плита 13 останавливается и срабатьшает датчик 24, а кассета 6 находится строго под съемной сек цией 5. Датчик 24 подает команду на движение штока 35 цилиндра 37 вниз и вместе с ним опускается съемная секция 5. При этом последовательно срабатьшают датчики 41 и 42, Датчик 41 подает команду на перемещение Из-под съемной секции 5 поддержек 43 что происходит в момент достижения съемной секции 5 кассеты 6, и каркас съемной секции 5 охватывает ее. При касании съемной секции 5 несущей плиты 13 срабатьюает датчик 42, который подает команду на вдвижение посредством цилиндров, вьтолнен ных в каркасе съемной секции 5, поддержак 43 под кассету 6 и подъем штока 36 йверх, который поднимает съемную секцию 5 вместе с кассетой 6 вверх. Таким образом происходит формирование второго штабеля кассет в съемной секции 5 магазина-накопителя. При подъеме секции 5 вверх срабатьшает датчик 4I, который подает команду на вдвижение штока 15 цилиндра 16, палец 18 приходит в пересечение 20 паза 19 и упирается в стенку 27, При этом срабатьгоает датчик 26, и цикл работы устройства повторяется вновь, но уже с очередной кассетой 6 из приемной секции 4, аналогично тому, как после Нажатия кнопки Пуск пульта управления Аналогично работает устройство и при съеме деталей с технологического оборудования, только в приемную секцию 4 загружаются пустые касс.еты 6 без деталей 7, а в съемную секцию 5 поступают кассеты 6 с деталями-7. Устройство позволяет работать также с возвращением детали 7 промьшшенным роботом после технологической обработки в первоначальное базовое отверстие 8. При этом в . приемную секцию 4 загружаются кассеты ,6 с необработанными деталями 7, а из съемной секции 5 снимают детали кассеты 6с обработанными деталями 7, которые передаются к другому оборудов нию в такое же загрузочное устройство. При значительном изменении типоразмера загруженных .деталей.необходимо изготовить новый копир, по нему обработать как по шаблону новые . кассеты, а само устройство больше никаких переделок не требует. Предлагаемое загрузочно-разгрузочное устройство позволяет работать и автоматическом режиме с промьшшенным роЬотом и производить загрузку или разгрузку многорядных, гнездовых кассет, установленных в штабель из одной точки съема или установки деталей.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| Устройство для загрузки плоских изделий, преимущественно выводных рамок интегральных схем | 1987 |
|
SU1499540A1 |
| Устройство для подачи деталей | 1988 |
|
SU1569180A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Станок для шлифования деталей | 1987 |
|
SU1713426A3 |
| Приемное устройство | 1987 |
|
SU1433671A1 |
ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО, содержащее Магазин-накопитель, состоящий из двух штабелей кассет с поддержками механизм горизонтального и вертикального перемещений кассет и датчики юс положения, отличающееся тем, что, с целью расширения технологических возможностей устройства, механизм горизонтального перемещения кассет выполнен в виде несущей плиты с элементами фиксации кассет, установленного под несущей плитой копира в виде замкнутого зигзагообразного с перпендикулярными участками паза и двух силовых цилиндров, расположенных во взаимно-перпендикулярных плоскостях и связанных с несущей плитой, которая смонтирована с возможностью перемещения под штабелями кассет и снабжена пальцем, установленньм с возможностью взаимодействия с копив ром.
L.rtr.r.rf..rt flr-Tl
2 ;s:м: м жs м жs мs м :
Г- Г(поВернуто)
. /7 S
2Г
25
7Г Г /
2Q 27
л зг.зц
Г /
19
Фиг.6
Фuz.
Д-Д
19
S$$$SS$SSS :
fJ
ФигЗ
| Магазинный накопитель деталей | 1974 |
|
SU590131A1 |
