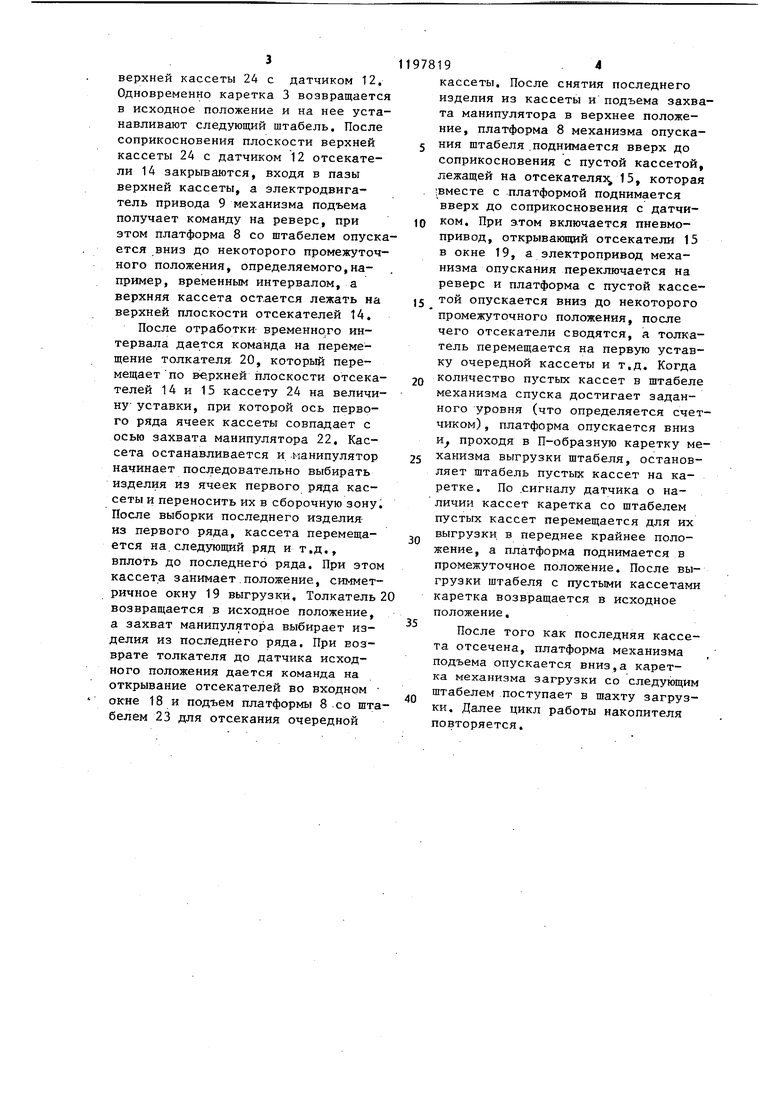
Изобретение относится к автоматизации, подачи кассет в рабочую зо ну манипулятора путем загрузки и выгрузки штабелей кассет. Цель изобретения - повышение производительности работы устройства за счет непрерывной перегрузки кассет с изделиями, ,, На фиг.1 изображен накопительпёрегруэчиК кассет, общий вид; на фиг.2 - то же, вид слева; на фиг,3 - то же, вид сверху. Накопитель-перегрузчик кассет содержит- корпус 1, разделенный перегородкой 2 на две секции, В одной из секции расположены механизм загрузки штабеля кассет, механизм подъема кассет, механизм отделения кассеты от штабеля. В другой секции расположены механизм присоединения кассеты к штабелю, механизм опускания кассет и механизм выгрузки штабеля кассет. Первая секция работает на подъем, вторая на спуск , Механизмы первойсекции идентичны механизмам второй секции Обе секции соединены механизмом го ризонтального шагового перемещения кассеты. Механизмы загрузки и выгрузки штабеля кассет содержит П-образную каретку 3, направляющие 4, по кото рым перемещается каретка, и электр привод 5, Каретка 3 имеет посадочное гнездо, выполненное на боковых сторонах каретки в виде паза 6 с заходными фасками 7, для надежной ориентации и фиксации штабеля Каретка 3 снабжена датчиком наличия кассет и связана с регулируемым электроприводом 5 зубчатоременной передачей. Механизмы загру ки и выгрузки штабеля кассет снабжены датчиками конечных положений каретки (не показаны), Механизмы подъема и опускания кассет содержат платформу 8, элек ропривод 9 и направляющие 10 с пол зуном 11. Платформа 8 взаимодействует с кареткой 3 и через передач винт-гайка связана с регулируемым Л электроприводом 9. Механизмы отделения кассеты от штабеля и присоединения кассеты к штабелю содержат датчики 12 и 13 уровня верхней кассеты штабеля, отсекатели 14 и 15 и вертикальные заходные направляющие 16, Заходные 19 .2 направляющие выполняют функцию ловителей верхней кассеты штабеля при его подъеме и ограничивают головную часть штабеля в процессе отделения - присоединения кассеты. Датчики 12 и 13 взаимодействуют непосредственно с верхней плоскостью кассеты в штабеле, Отсекатели 14 и 15 связаны с помощью рьгчагов, например, с пневмоприводом и взаимодействуют с датчиком исходного положения отсекателей (не показан) . Механизм горизонтального шагового перемещения кассеты содержит раму 17, в которой вьтолнены впуск ное окно 18 и выпускное окно 19, где расположены отсекатели .14 и 15, причем верхние поверхности отсекателей 14 и 15 лежат в одной плоскости, что гарантирует плавное шаговое перемещение отделенной от штабеля кассеты из окна 18 в окт но 19 и ее точный останов, Меха низм снабжен толкателем 20 и приводом 21 шагового перемещения. Толкатель, перемещающий кассету по отсекателям, получает продольное перемещение от регулируемого щагового электропривода с помощью передачи винт-гайка,Механизм имеет датчик исходного положения толкателя (не показан) , Над механизмом горизонтального шагового перемещения установлен манипулятор 22. Накопитель-перегрузчик кассет работает следующим образом, В исходном положении каретка 3 механизма загрузки штабеля находится в переднем крайнем положении, а каретка механизма выгрузки штабеля - в заднем крайнем положении. Толкатель 20 находится в крайнем правом положении, а отсекатели 14 и 15 закрыты, т,е. перекрывают окна 18 и 19, Штабель 23 устанавливают в паз 6 каретки 3, Датчик наличия кассет ает команду на перемещение каретки со штабелем в секцию подъема (до атчика конечного положения каретки).. По этому сигналу платформа 8 перемещается вверх, а отсекатели 14 открьгоаются. Платформа 8 проходит сквозь П-образную каретку 3, снимает с нее штабель и по направляющим 16 однимает его вверх к входному окну 18 до соприкосновения плоскости
3
верхней кассеты 24 с датчиком 12, Одновременно каретка 3 возвращается в исходное положение и на нее устанавливают следующий штабель. После соприкосновения плоскости верхней кассеты 24 с датчиком 12 отсекатели 14 закрываются, входя в пазы верхней кассеты, а электродвигатель привода 9 механизма подъема получает команду на реверс, при этом платформа 8 со штабелем опускается вниз до некоторого промежуточного положения, определяемого,например, временным интервалом, а верхняя кассета остается лежать на верхней плоскости отсекателей 14. После отработки временного интервала дается команда на перемещение толкателя 20, который перемещает по ве.рхней плоскости отсекателей 14 и 15 кассету 24 на величину уставки, при которой ось первого ряда ячеек кассеты совпадает с осью захвата манипулятора 22, Кассета останавливается и манипулятор начинает последовательно выбирать изделия из ячеек первого ряда кассеты и переносить их в сборочную зону. После выборки последнего изделия из первого ряда, кассета перемещается на. следзпощий ряд и т,д., вплоть до последнего ряда. При этом кассета занимавт.положение, симметричное окну 19 выгрузки. Толкатель возвращается в исходное положение, а захват манипулятора выбирает изделия из послгеднего ряда. При возврате толкателя до датчика исходного положения дается команда на открывание отсекателей во входном окне 18 и подъем платформы 8 со штабелем 23 для отсекания очередной
78194
кассеты. После снятия последнего изделия из кассеты и подъема захвата манипулятора в верхнее положение, платформа 8 механизма опускания штабеля .поднимается вверх до соприкосновения с пустой кассетой, лежащей на отсекателяз 15, которая . |вместе с платформой поднимается вверх до соприкосновения с датчиком. При Э.ТОМ включается пневмопривод, открывающий отсекатели 13 в окне 19, а электропривод механизма опускания переключается на реверс и платформа с пустой кассетой опускается вниз до некоторого промежуточного положения, после чего отсекатели сводятся, а толкатель перемещается на первую уставку очередной кассеты и т.д. Когда
Q количество пустых кассет в штабеле механизма спуска достигает заданного уровня (что определяется счетчиком) , платформа опускается вниз и проходя в П-образную каретку механизма выгрузки штабеля, остановляет штабель пустых кассет на каретке. По .сигналу датчика о наличии кассет каретка со штабелем пустых кассет перемещается для их выгрузки в переднее крайнее поло0жение, а платформа поднимается в промежуточное положение. После выгрузки штабеля с пустыми кассетами каретка возвращается в исходное положение,
5 „
После того как последняя кассета отсечена, платформа механизма подъема опускается вниз,а каретка механизма загрузки со следующим штабелем поступает в шахту загрузки. Далее цикл работы накопителя повторяется.
/W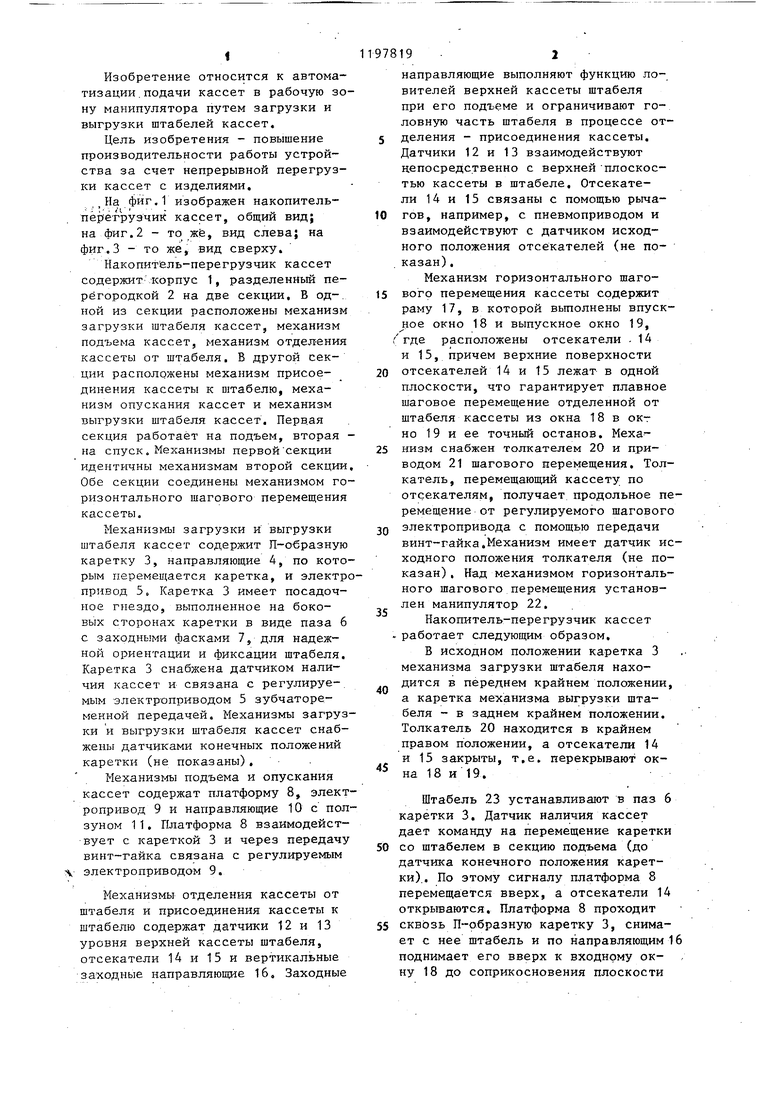
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Накопитель-перегрузчик кассет | 1986 |
|
SU1355445A2 |
| Накопитель-перегрузчик | 1989 |
|
SU1731587A1 |
| Автоматизированная линия изготовления крутоизогнутых отводов | 1989 |
|
SU1708475A1 |
| Накопитель-перегрузчик | 1987 |
|
SU1437185A1 |
| Накопитель-перегрузчик кассет | 1990 |
|
SU1799712A1 |
| Устройство для выгрузки радиодеталей из групповых кассет с канавками | 1990 |
|
SU1781857A1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ИНДИВИДУАЛЬНОЙ ОБРАБОТКИ ПОДЛОЖЕК КВАДРАТНОЙ ИЛИ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 2007 |
|
RU2367526C2 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1303371A1 |
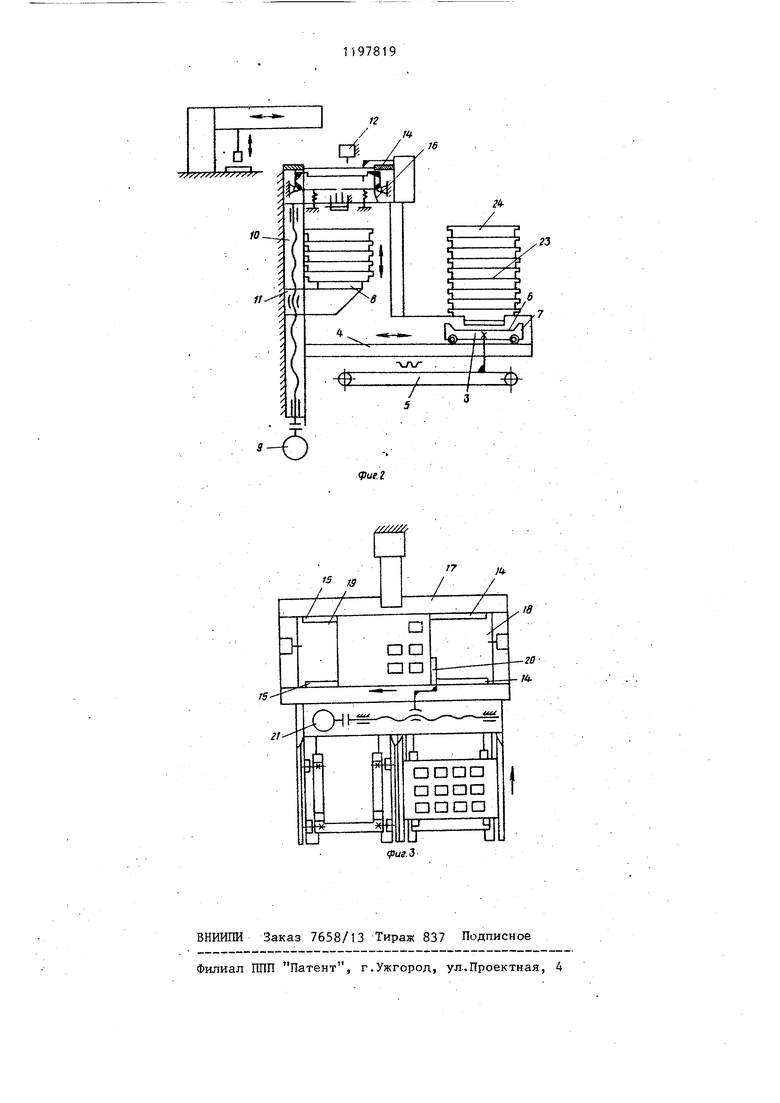
НАКОПИТЕЛЬ-ПЕРЕГРУЗЧИК КАССЕТ, состоящий из двух секций, механизмов подъема и опускания кассет, механизмов отделения кассеты от штабеля и присоединения кассеты к штабелю, механизма горизонтального шагового перемещения кассет и манипулятора, отличающийс я тем, что, с целью повьшения производительности работы устройства, оно снабжено механизмами загрузки и выгрузки штабеля кассет, выполненными.каждый в виде П-образной каретки и направляющих в каждой секции. W со « 00 со
-6
| Магазинный накопитель деталей | 1974 |
|
SU590131A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
