Автооператоры к сферошлнфовальному станку с качающейся бабкой и фиксированной плоскостью вращения шлифовального круга для обработки наружных поверхностей колец, нанример подшипников, с применением шпинделя с мембранной оправкой для насадки на нее колец и механизма подачи их к приег.июму лотку бункера - известны.
В описываемом автооператоре мембранная оправка снабжена еще и совершающей возвратно-поступательные движения вилкой, предназначенной для приема колец из бункера и подачи их на рабочую позицию, с последующим отводом и сбрасыванием в отводной лоток. Такое устройство имеет целью полнее автоматизировать цикл шлифования и уменьшить вспомогательное время обработки, а для поочередного и последовательного ввода в действие и останова механизмов подачи и сообщения вилке возвратно-поступательного движения применена система взаимосвязанных электрических и пневматических устройств, последовательно включающих путевые контакты системы.
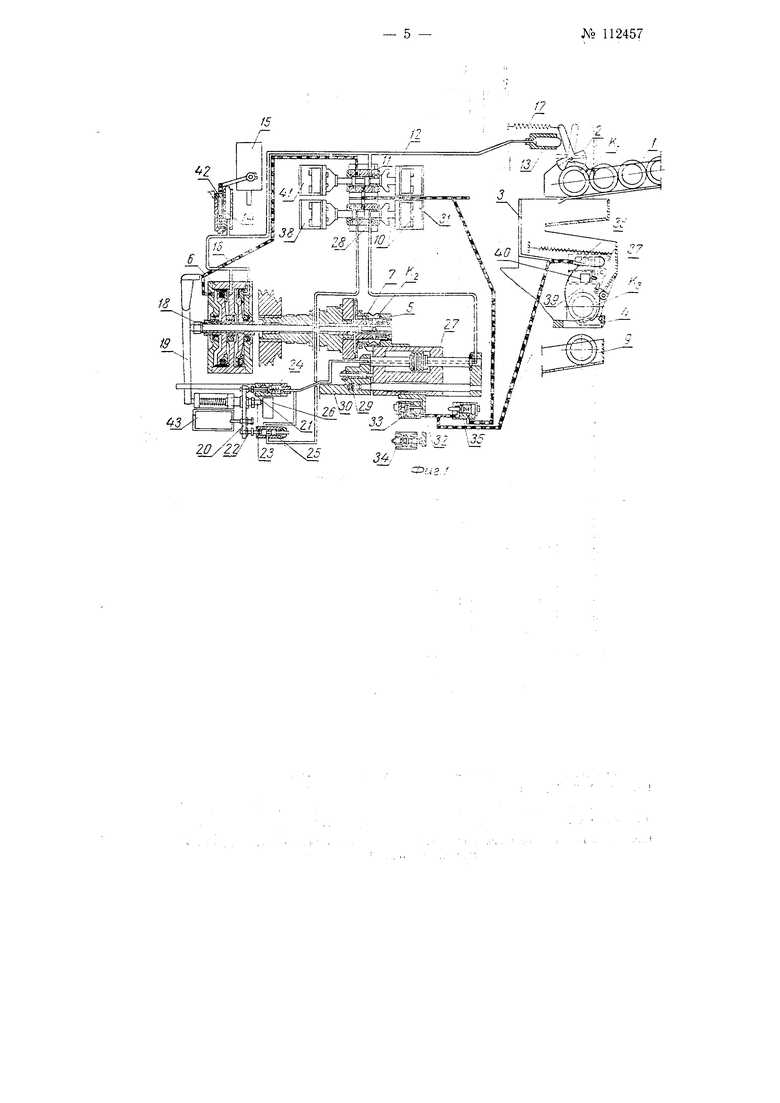
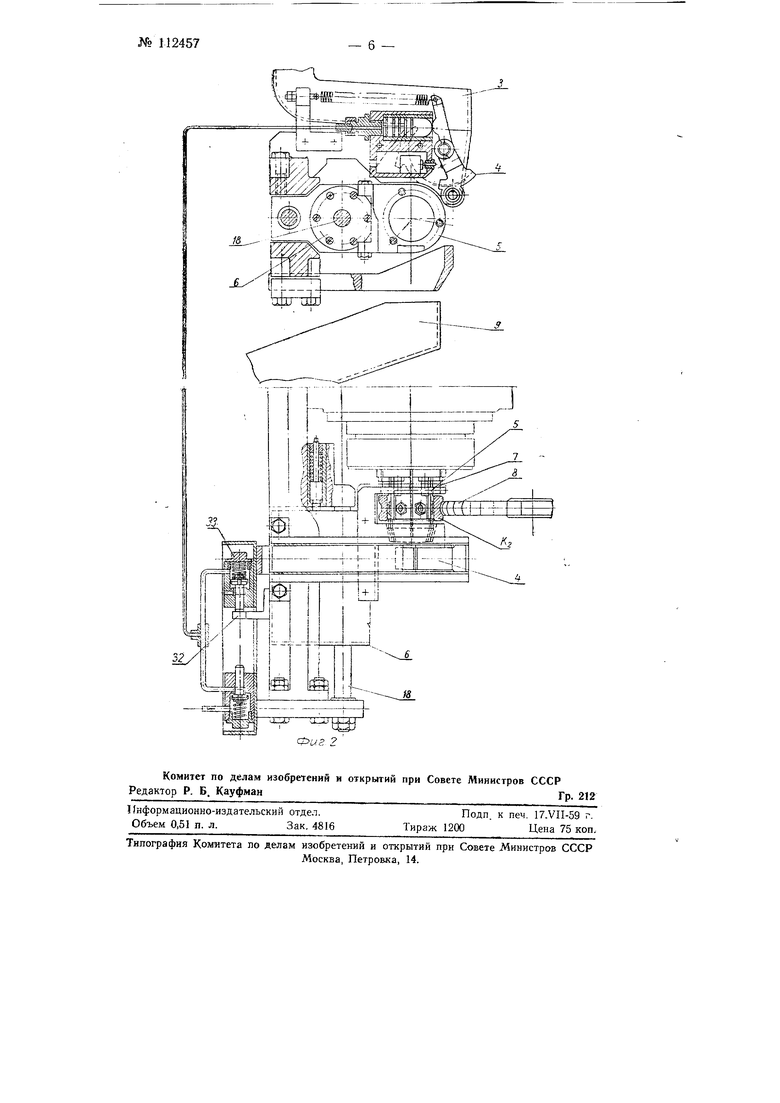
На фиг. 1 показана схема путевых контактов автооператора; на фиг. 2 - головка автооператорл.
Подготовленные к обработке кольца подшипников из питательного лотка подаются отсекателем 2 в кольцевой двухъярусный бункер 3, который снабжен для удержания и последующей передачи колец регулируемым донным мостико.м 4, расположенным в своем крайне.м нижнем положении в прорези вилки 5.
Под воздействием пневмоцилиндра 6 посадочно-съемная вилка периодически совершает регулируемые возвратно-поступательные движения, имеющие своим назначением прием кольца с донного мостика, подачу и посадку его на .мембранную оправку 7 для осуществления операции шлифовки желоба кольца шлифовальным кругом 8 и, наконец, съем кольца с мембранной оправки после окончания шлифовки и сбрасывание его в отводной лоток 9.
Донный мостик может подниматься и опускаться (имея на себе кольцо или без него) в двух случаях: когда посадочно-съемная вилка отощла
№ 112457- 2 -
в крайнее положение в момент насадки кольца на мембранную онравку; когда посадочно- съемная вилка находится в противоположном крайнем положении носле съема кольца с оправки.
В первом случае это возможно потому, что тело вилки полностью уходит из зоны движения донного мостика.
Во втором случае движение мостика осуществляется через специальную прорезь в средней части вилки.
Движение вилки возможно как в верхнем, так и в нижнем положении мостика (только не в промежуточном).
Действие автооператора состоит в том, что в конце отвода бабки шлифовального круга станка соответствующий путевой контакт включает электромагнит W, перемещающий золотник воздушного крана // вправо.
Сжатый воздух через правую полость по трубе 12 поступит в пневматические органы: цилиндр 13, управляющий отсекателем колец 2, питающего лотка /, в который кольца подаются вручную или с потока транспортером; цилиндр 14 для подъема мерительной головки 15 и правые полости пневмоцилиндра 6.
Вследствие этого щток цилиндра 13 повернет отсекатель 2 вправо, вызывая растяжение пружины возврата 17, освобождая кольцо /С;, поступающее затем по гравитационным лоткам в кольцевой бункер 3 автооператора. Отсекатель 2 остается в отведенном ноложении, задерживая перемещение остальных колец, находящихся в питающем лотке /.
Шток пневмоцилиндра 6, перемещаясь влево, устранит прогиб мембранной оправки 7, освободив и оставив незажатым обработанное кольцо KzОдновременно щток 18 посредством рычага 19 отведет влево планку 20, несущую упоры 21, 22 и 23, соответственно воздействующие на путевые пневматические 24 vi 25 и электрический 26 контакты (вторая линия пиевмосети 16).
В результате подпрул иненный клапан пневматического контакта 24 переместится влево п перекроет сообщение с атмосферой левой полости цилиндра 27, а подпружиненный клапан второго нневмоконтакта 25, перемещаясь, свяжет левую полость цилиндра 27 через тракт пневмоконтакта 25 с левой полостью воздушного крана 28, золотник которого смещен влево.
При этом положении золотника крана 28 сжатый воздух будет следовать через кран 28 и иневмоконтакт 25 в левую полость цилиндра 27, тем самым производя перемещение установочно-съемной вилки 5 влево на 1,5-2 мм и вдавливание пружинящих упоров 29, расположенных на станине 30 упора.
Золотник крана 28, находящийся в это время в левом положении, свяжет с атмосферой соответствующие трубки и правую полость цилиндра 27 через сверление в этой полости.
Этим действием пневматики завершается первый этап цикла работы оператора.
Приведенный в замкнутое положение электрический выключатель, воздействуя на соответствующее реле электрической схемы управления, приводит в действие электромагнит 31 воздушного крана 28.
После перемещения золотника крана 28 вправо правая полость цилиндра 27 окажется связанной через правую полость крана 28 с сетью сжатого воздуха, а левая полость цилиндра 27 через пневмоконтакт 25 и соответствующую трубку свяжет левую полость крана 28 и ее отверстие с атмосферой.
Подача воздуха в правую полость подвижного цилиндра 27 вызовет
перемещение его вправо вместе с укрепленной на нем вилкой о, чем оеуществитея еъем с мембранной оправк : 7 обработанного кольца /Cs.
Правая чаеть вилки 5, неременитясь вправо, окажется под донг.ым мостиком 4, иоднятым в это время.
Снятое с мембранной онраггкп 7 об11аботанное кольцо К-2 ноступнт при падении в отводной лоток 9.
В крайнем правом положении вилки 5, гллеющаяся в ней прорезь окажется под данным моетиком 4.
В начале съема кольца упор 32, укрепленный на корпусе 27 отойдет от штока иневматического контакта 33, освобожденный клапан которого. перемеще п1ый прул иь:ой вправо. с атмосферой по.юсть цилиндра, уиравляюшего поворотом донного люстика 4.
Одновременно упор 32 перестанет зоздейстзовать на шток электрического конечного выключателя 34, включаюш,его реле времени, согласующее момент конца съема отработанного кольца Да с началом подачи очередного кольца Кя.
Упор 32, воздействуя в конне съема кольца Да на ннев ;оконтакт oj, сместит его штоь: вправо. Тогда сеть сжатого возду :а сообщится через нневмоконтакт 35 е цилнндром 36. Шток ци.линдра 36 повер|-;ет рычаг 37, который опустит даннь-й мостик 4 в прорезь вилки 5. Тем самым очередное кольцо К: до этого отглтавившееся на до;;нь:п мостик 4, опустится вниз.
Вместе с тем ижнее по. ожение допюго мосгнка 4 нознолит вилке 5 переместиться справа палево и осушестви.т уста-ювку кольца /Сз на мембранную онравку 7.
После устаьговки реле врелгенн замкнет цепь электромаг11 та 38, воздушного крана 28 и в результате перемещения влево золотника этого крана сеть сообщится через полость крана 28 и пневмоконтакт 25 с левой полостью цилиндра 27, а правая его полость-через правую полость крана 28 и отверстие в пей-с атмосферой.
Благодаря распределению нодачп сжатого воздуха цглнндр 27 вместе с установочно-съемной вилкой 5, несущей очередное кольцо Л:-, проследует влево, осуществляя }ста;1овку послед :его на .ембрапную оправку 7.
Одновременно, вследствие нерсмендения цилиндра 2.7, пружинящие упоры 29 окажутся утонленп.ыми. Б }-;ачале движен15я цилиидра 27 влево его упор 32 освободит шток п1-1евмоко;ггакта о5. который, перемещаясь, разобщит цилиндр 36 с сетью сжатого воздуха.
В конце перемещения цп.-;иидра 27 влево его унор 32, воздействуя на щток пцевмоко такта 33, сместит его влево, чем сообщит полость цилиндра 27 с атмосферой.
Подпружиненный рычаг 37, действующий па шток цилиндра 36, переместится влево, утоиит этот шток и уберет вверх донный мостик 4, закрыв тем самым люк нриемиого бункера .3. Подъем мостика осуществится беспрепятственно, так как в это время вилка 5 находится в крайнем левом положеиии. Унор 39 цилиндра 36 в конце хода воздействует ца электрический конечный выключатель 40, осуществляющий включение электромагнита 41 воздушного крана /./.
Сместившийся влево золотник крана 11 с сетью левую полость левого пневмоцилиндра 6.
Одновременно полоети цилиндров 13 и 14 и обе правые полоети пневмоцилиндра 6 через правую полость пневмокрана 11 и сверление в ней сообщатся с атмосферой. В результате падения давления в цилиндре J4 мерительная головка 15 начнет опускаться. Это опускание будет происходить с выдержкой времени, обеспеченной действием калиброванного перепускного отверстия в плунжере лубрикатора 42, согласованной
- 3 112457
№ 112457- 4 -
со временем, необходимым для снятия с поверхности жолоба кольца Кз токарных рисок излифовальным кругом станка, вступающим в действие.
Одновременно отсекатель 2 питающего лотка / переместится влево и, утопив щток цилиндра 13, перепустит следующее кольцо в вилку отсекателя 2. В результате поступления сжатого воздуха в левую полость пневмоцилиндра 6 и под действием упругой силы мембранной оправки 7 щток 18 ппевмоцилиндра 6 переместится вправо и мембранная оправка прочно закрепит кольцо /Сз, подлежащее обработке. Шток 13 в конце хода и разжатия оправки 7 воздействует на подпружиненный рычаг 19, который при повороте, под действием своей пружины против часовой стрелки, переместит вправо планку 20 с упорами 21, 22 и 23. Последние воздействуют па пневмоконтакты 24 ц 25 и при этом, вследствие смещения щтоков этих нневмсконтактов, первый отсечет левую полость крана 11 от левой полости цилиндра 27, а второй сообщит ее с атмосферой. В результате этого в обеих полостях цилиндра 27 давление станет равным нулю и упоры 29 силой своих пружин установят цилиндр 27 вместе с вилкой 5 в нейтральное положение, при котором последняя не будет касаться соседних вращающихся частей.
Вместе с тем положение обрабатываемого очередного кольца /Сэ обеспечит в дальнейщем съем последнего. К моменту полного разжатия оправки 7 полностью заканчивается цикл работы автооператора, а повторение цикла начнется от действия конечного выключателя 43, шток которого освободится при перемещении вправо планки 20.
Предмет изобретения
1.Автооператор к сферощлифовальному станку с качающейся бабкой и фиксированной плоскостью вращения щлифовального круга для обработки наружных поверхностей колец, например подщипников, с применением шпинделя с мембранной оправкой для насадки на нее колец и механизма подачи их к приемному лотку бункера, отличающийся тем, что, с целью полной автоматизаци цикла щлифования и уменьшения вспомогательного времени обработки, мембранная оправка снабжена соверщающей возвратно-поступательные движения вилкой, предназначенной для нриема колец из бункера и подачи их на рабочую позицию, с последующим отводом и сбрасыванием в отводной лоток.
2.Автооператор по п. 1, отличающийся тем, что для поочередного и последовательного ввода в действие и останова механизмов подачи и сообщения вилке возвратно-поступательного движения применена система взаимосвязанных электрических и пневматических устройств, последовательно включающих, начиная с конечного пункта отвода бабки, путевые контакты системы.
щ.ШШ
xf|i
2/ir ,
ei 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор к станку для шлифования буртиков внутренних колец роликоподшипников | 1959 |
|
SU128326A1 |
| Автооператор для горизонтальных многошпиндельных токарных станков | 1980 |
|
SU882724A1 |
| Устройство для ротационного выдавливания тонкостенных цилиндров | 1972 |
|
SU446340A1 |
| Автомат для нарезания резьбы в круглых шлицевых гайках | 1977 |
|
SU707763A1 |
| Устройство для разборки нажимных валиков машин прядильного производства | 1977 |
|
SU672236A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| КЛЕПАЛЬНЫЙ СТАНОК | 1970 |
|
SU268874A1 |
| Автомат для сборки уплотнительногоузлА КАРдАННыХ пОдшипНиКОВ | 1978 |
|
SU796513A1 |
| Загрузочное устройство к станку для обработки деталей | 1984 |
|
SU1310165A1 |
| Приспособление для создания пульсаций давления у гидравлических машин, служащих для статического испытания рессор | 1940 |
|
SU58740A1 |