Изобретение относится к дистанционному управлению землеройными машинами посредством оптического луча.
Цель изобретения - расширение области применения системы за счет обе- спечения возможности одновременного управления креном рабочего органа.
На-фиг,1 приведена оптико-кинематическая схема системы дистанционного
г- f5
управления; на ф иГо2 и 3 - электрон- JO гана машины посредством гидроприво- ная схема систег-гы дистанционного управления, варианты.
Система содержит фотоприемн ики 1 и 2, качающуюся линейку 3, штангу фо- сприемника 4, раму 5 машины, высот ные гидропроводы 6, раму 7 рабочего ор гана, гидропривод 8 крена, - рабочий орган 9, рычаг 10 рабочего органа, соединительную тягу 11 , шкалу 12 углов крена, подъемный винт 13, карданный 20 вал 14 с отсчеТным механизмом, пре- дЗ силители 15, фототока, блоки 16,, фильтров, компараторы 17, регуляторы 18( чувствительности, выходные усилителИ 19,,2 .
Основной фотоприемник 1 установлен на штанге А, жестко связанной с рабочим органом 9, например с ножом грей25
дов 6 и 8.
Для возможности применения на машинах с различной динамикой компараторы 17( и 17 снабжены регуляторами 18, и 182 чувствительности, позволяю щими достигнуть высокой чувствительности и избежать автоколебаний.
Система работает следующим образом
Для движения машины в заданной плоскости без учета крена прожектор устанавливается на заданный угол уклона и включается основной прием- лик 1 со своей электронной схемой, управляющий гидроприводами 6, которы обеспечивают выполнение заданного вертикального профиля сооружения. Ес ли при этом требуется и выполнение нужного поперечного профиля крена, то линейка 3 при помощи винта 13 по
Для движения машины в заданной плоскости без учета крена прожектор устанавливается на заданный угол уклона и включается основной прием- лик 1 со своей электронной схемой, управляющий гидроприводами 6, котор обеспечивают выполнение заданного вертикального профиля сооружения. Е ли при этом требуется и выполнение нужного поперечного профиля крена, то линейка 3 при помощи винта 13 по
дера или бульдозера. На той же штанге
установлена качающаяся линейка 3с. -30 шкале 12 наклоняется на требуемый
дополнительным приемником 2 на одном угол у крена, как показано на фиг.1
конце, причем второй ее конец шарнирно связан с подъемным винтом 13, на
котором укреплена шкала 12 углов крештрихпунктиром.
При включении электронной схемы дополнительного приемника 2 он такж
на. Для возможности установки величи- 35 как и основной, начинает отслеживать
ны крена водителем во время движения шкала 12 соединена с находящимся в кабине маховичком при помощи карданного вала 1А, Механизм установки углов крена связан с рабочим органом соединительной тягой. Штанга 4 укреплена в раме 7 рабочего органа, которая подвешена к раме 5 машины, посрегоризонтальную границу раздела часто в управляющем луче, причем посредст- вом гидропривода 8 разворачивает рабочий орган 9 и связанную с ним тяго 11 линейку 3 таким образом, чтобы об фотоприемника находились на границе частот f, и fj управляющего луча, т.е. в одной горизонтальной плоскости. При этом нож 9 разворачивается на за
дством дйух гидроприводов 6, управляющих высотным положением фотоприемни- 45 данный угол у, как показано на фиг.1 ка 1. Рабочий орган 9, например нож, штрихпунктиром. шарнирно подвешен к раме 7, а его положение к углу крена у управляется гидроприводом 8, воздействующим на 10,. причем угол наклона ножа
50
Погрешность отработки угла крена, как это видно из схемы (фиг.1), опре деляется расстоянием 1 между приемни ками 1 и 2 и чувствительностью систе мы управления. Экспериментально уста новленная чувствительность системы ПУЛ-Н в статике равна ±1,2 мм на -да
равен углу наклона линейки 3, так как они связаны тягой 11, образующей параллелограмм.
Погрешность отработки угла крена как это видно из схемы (фиг.1), опр деляется расстоянием 1 между приемн ками 1 и 2 и чувствительностью сист мы управления. Экспериментально уст новленная чувствительность системы ПУЛ-Н в статике равна ±1,2 мм на -да
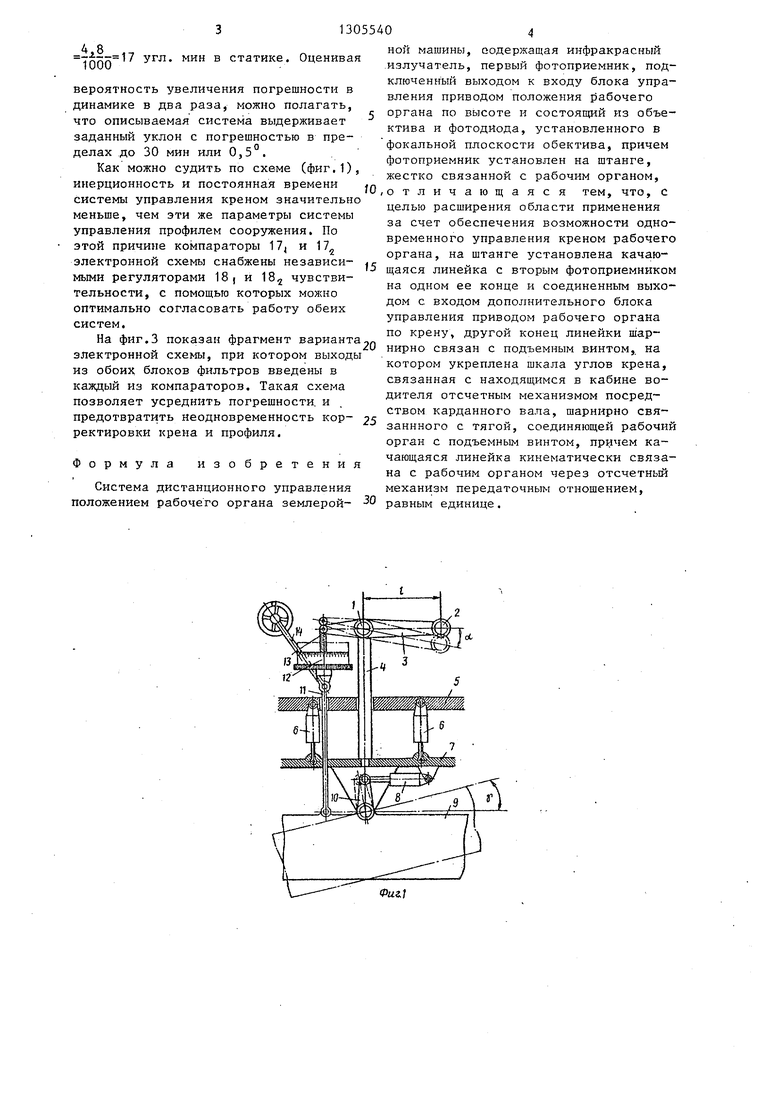
На фиг. 2 и 3 показан путь сигнала „ статике равна zi,z мм на w от фотоприемников 1 и 2 к гидропрово- ьности 240 м. Приняв величину 1
дам рабочего органа. Сигналы фотоприемников 1 и 2 поступают в предусили- тели 15, и 15, имеющие ЛРУ, затем 5з
500 мм, получаем наибольшую величи
9 1 9
ну погрешности в угле )Г 5)f спл
блоки 16,, фильтров, где они разделяются по частотам. Далее сигналы, ртвечающие частотам f и f, направляются в компараторы 17, и 17, где они сравниваются по величине и разностные сигналы направляются в выходные усилители 19;( и 19, откуда поступают Б систему управления высотным положением и углом крена рабочего органа машины посредством гидроприво-
гана машины посредством гидроприво-
дов 6 и 8.
Для возможности применения на машинах с различной динамикой компараторы 17( и 17 снабжены регуляторами 18, и 182 чувствительности, позволяю щими достигнуть высокой чувствительности и избежать автоколебаний.
Система работает следующим образом.
Для движения машины в заданной плоскости без учета крена прожектор устанавливается на заданный угол уклона и включается основной прием- ик 1 со своей электронной схемой, управляющий гидроприводами 6, которые обеспечивают выполнение заданного вертикального профиля сооружения. Если при этом требуется и выполнение нужного поперечного профиля крена, то линейка 3 при помощи винта 13 по
шкале 12 наклоняется на требуемый
штрихпунктиром.
При включении электронной схемы дополнительного приемника 2 он также.
горизонтальную границу раздела частот в управляющем луче, причем посредст- вом гидропривода 8 разворачивает рабочий орган 9 и связанную с ним тягой 11 линейку 3 таким образом, чтобы оба фотоприемника находились на границе частот f, и fj управляющего луча, т.е. в одной горизонтальной плоскости. При этом нож 9 разворачивается на заданный угол у, как показано на фиг.1 штрихпунктиром.
данный угол у, как показано на фиг.1 штрихпунктиром.
Погрешность отработки угла крена, как это видно из схемы (фиг.1), определяется расстоянием 1 между приемниками 1 и 2 и чувствительностью системы управления. Экспериментально установленная чувствительность системы ПУЛ-Н в статике равна ±1,2 мм на статике равна zi,z мм на w ьности 240 м. Приняв величину 1
статике равна zi,z мм на w ьности 240 м. Приняв величину 1
500 мм, получаем наибольшую величи9 1 9
ну погрешности в угле )Г 5)f спл
1000
угл. мин в статике. Оценивая
вероятность увеличения погрешности в динамике в два раза, можно полагать, что описываемая система выдерживает заданный уклон с погрешностью в пределах до 30 мин или 0,5 .
Как можно судить по схеме (фиг.1), инерционность и постоянная времени системы управления креном значительно меньше, чем эти же параметры системы управления профилем сооружения. По этой причине компараторы 174 электронной схемы снабжены независимыми регуляторами 18j и IS чувствительности, с помощью которых можно оптимально согласовать работу обеих систем.
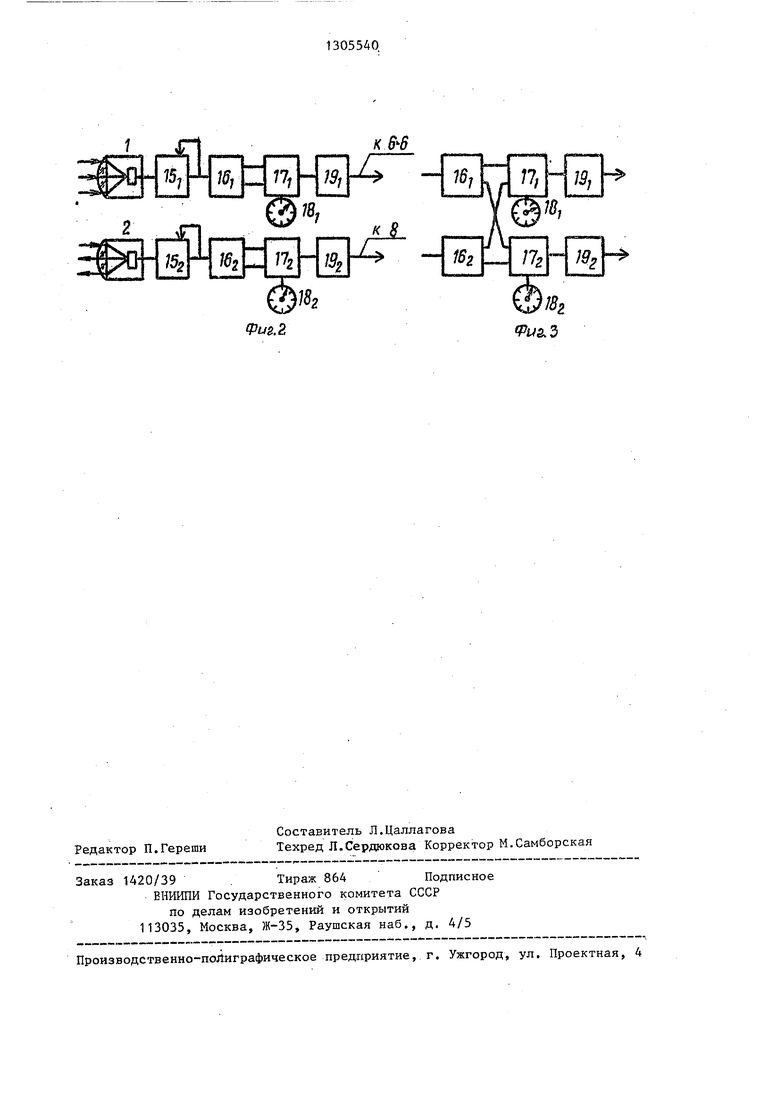
На фиг.З показан фрагмент варианта электронной схемы, при котором выходы из обоих блоков фильтров введены в каждый из компараторов. Такая схема позволяет усреднить погрешности, и предотвратить неодновременность корректировки крена и профиля.
Формула изобретения
Ш,
Система дистанционного управления положением рабочего органа землерой- равным единице.
13055404
ной машины, содержащая инфракрасный излучатель, первый фотоприемник, подключенный выходом к входу блока управления приводом положения рабочего органа по высоте и состоящий из объектива и фотодиода, установленного в фокальной плоскости обектива, причем фотоприемник установлен на штанге, жестко связанной с рабочим органом, отличающаяся тем, что, с целью расширения области применения за счет обеспечения возможности одновременного управления креном рабочего органа, на штанге установлена качающаяся линейка с вторым фотоприемннком на одном ее конце и соединенным выходом с входом дополнительного блока управления приводом рабочего органа по крену, другой конец линейки niap- нирно связан с подъемным винтом, на котором укреплена шкала углов крена, связанная с находящимся в кабине водителя отсчетным механизмом посредством карданного вала, шарнирно свя- заннного с тягой, соединяющей рабочий орган с подъемным винтом, причем качающаяся линейка кинематически связана с рабочим органом через отсчетный механизм передаточным отношением.
15
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления рабочим органом землеройной машины | 1984 |
|
SU1418567A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| ДАТЧИК УГЛОВ КРЕНА И ТАНГАЖА | 2021 |
|
RU2787949C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| БОЛОМЕТРИЧЕСКИЙ ПРИЕМНИК ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1995 |
|
RU2082116C1 |
Изобретение относится к системам дистанционного управления высотным положением рабочего органа землеройных машин посредством инфракрасного светодиодного оптического луча типа для одновременного управления как высотой, так и креном рабочего органа, что необходимо, например, при подготовке оснований под железные и автодороги,.прокладке траншей под водоводы и др. работах. Цель изобретения - расширение области применения. Для этого приемная часть системы дополняется вторым приемником с электронной схемрй, аналогичным основному, расположенным на поперечной линейке размером около 0,5 м, имеющей возможность наклона из кабины водителя на нужный угол крена. Выходной сигнал злектросхемы второго приемника управляет приводом крена рабочего органа машины. Дальность действия системы до 300 м, погрешность выполнения угла крена в пределах 30 угл. мин. 3 ил.
Фиг.
Г Г1
- 75, -ЦТ
17,
19i
Фт.2
UT
19,
Редактор П.Гереши
Составитель Л.Цаллагова
Техред Л.Сердюкова Корректор М.Самборская
Заказ 1420/39 . Тираж 864 Подписное ЕНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНЫХ МАШИН | 0 |
|
SU201936A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пуговица | 0 |
|
SU83A1 |
| Л.: Межотраслевой центр научно-технической информации и пропаганды, , 1983. | |||
