Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам для перекладки изделий, преимущественно листовых заготовок.
Целью изобретения является расширение технологических возможностей за счет обеспечения переориентации изделий.
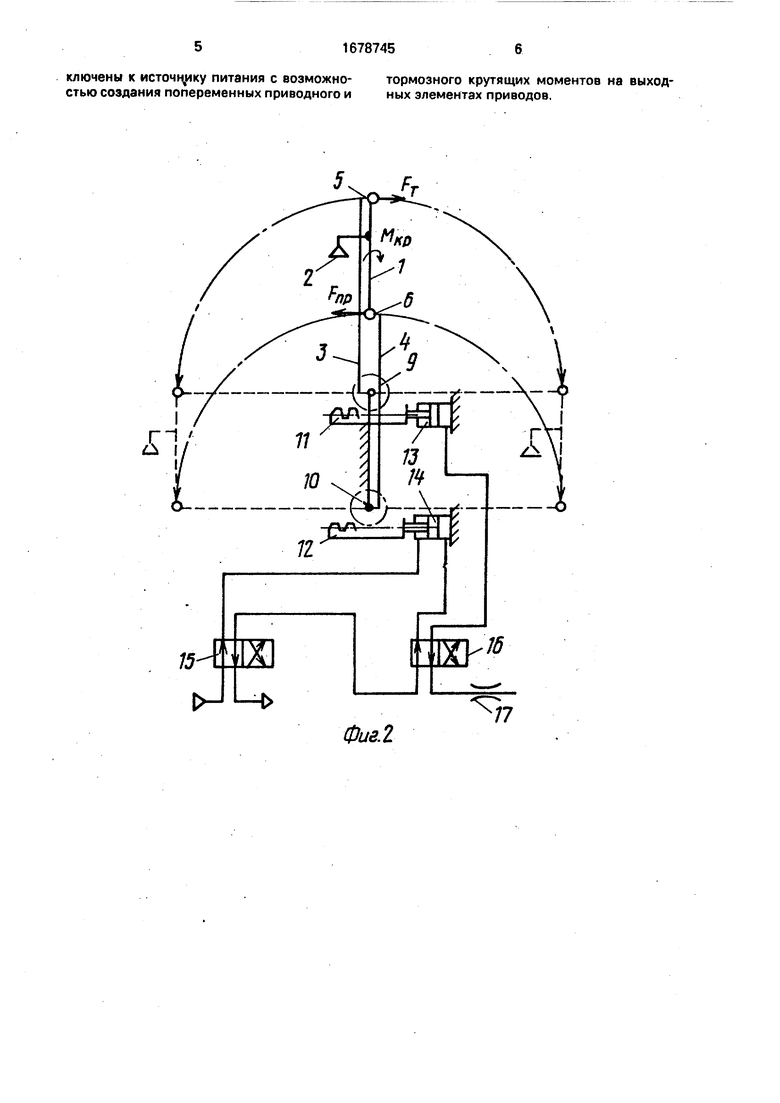
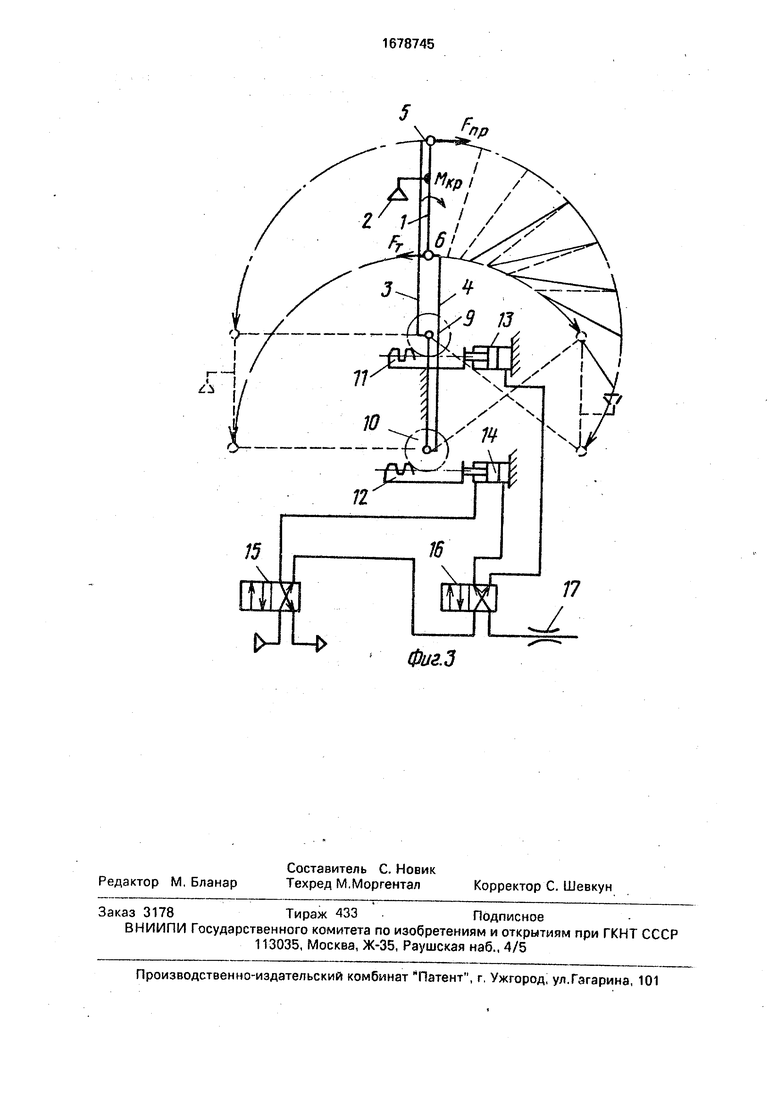
На фиг.1 изображена кинематическая схема перекладчика; на фиг.2 - схема перемещения элементов перекладчика; на фиг.З - схема перемещения элементов перекладчика с переориентацией изделия на 180°,
Перекладчик имеет люльку 1 с вакуумным схватом 2, установленную на двух кривошипах 3 и 4 с параллельными осями 5, б и 7, 8 их поворота. На осях 7 и 8 кривошипов установлены зубчатые колеса 9 и 10, соединенные с помощью реек 11 и 12 с реверсивными приводами, выполненными, например, в виде двух силовых цилиндров 13и14.
Управление перекладчиком осуществляется распределителями 15 и 16 и дросселем 17, через которые полости силовых цилиндров 13 и 14 соединены с источником давления (не показан).
Перекладчик работает следующим образом.
При включении распределителя 15 в правое положение (фиг.2) рабочая среда попадает в штоковую полость силового цилиндра 14, поршень перемещается вправо, перемещая рейку 12, при этом зубчатое колесо 10, соединенное с осью 8 кривошипа 4, начинает вращаться. Кривошип 4, перемещаясь влево, через люльку 1 увлекает за собой кривошип 3, при этом зубчатое колесо 9 воздействует на рейку 11, которая толкает поршень силового цилиндра 13 вправо. Поршень вытесняет из бесштоковой полости силового цилиндра 13 рабочую среду, которая через распределитель 16 и дроссель 17 выходит в атмосферу. При дросселировании создается сопротивление ходу поршня силового цилиндра 13 и, как результат, тормозная сила FT, приложенная к оси 5 соединения кривошипа 3 и люльки 1 и направленная противоположно приводной силе РПр, приложенной к оси 6 соединения кривошипа 4 и люльки 1 от силового цилиндра 14. Создаваемый при этом крутящий момент обеспечивает силовое замыкание кинематической цепи, что гарантирует прохождение люлькой 1 зоны неустойчивого равновесия. Люлька 1 по дуге окружности подходит к листовой заготовке в левое положение схватом 2 вниз и захватывает заготовку.
При переключении распределителя 15 в левое положение рабочая среда через распределитель 16 попадает в бесштоковую полость силового цилиндра 14. Поршень силового цилиндра 14, перемещаясь влево, через рейку 12, зубчатое колесо 10, кривошип 4 создает приводную силу ГЯр в противоположном направлении. Кривошип 4, перемещаясь вправо, через, люльку 1 увлекает за собой кривошип 3, который через зубчатое колесо 9 воздействует на рейку 11,
0 которая толкает поршень силового цилиндра 13 влево, в бесштоковой полости которого создается разрежение, и рабочая среда через распределитель 16 и дроссель 17 засасывается в эту полость силового цилиндре
5 13.
При дросселировании рабочей среды создается сопротивление ходу поршня силового цилиндра 13 и, в результате, тормозная сила FT, приложенная к оси 5 и
0 направленная противоположно силе Fnp. При этом люлька 1 по дуге окружности перемещает схват 2 в правое положение, где происходит сброс изделия.
Если необходимо при перекладке пере5 вернуть изделие на 180°, перекладчик управляется следующим образом.
При переключении распределителей 15 и 16 в левое положение (фиг.З) рабочая среда через распределитель 15 попадает в рас0 пределитель 16 и далее в бесштоковую полость силового цилиндра 13. Его поршень перемещает рейку 11 влево, рейка вращает зубчатое колесо 9, которое перемещает кривошип 3 по дуге окружности вправо, при
5 этом к оси 5 прикладывается приводная сила Fnp, а к оси 6 - тормозная сила FT за счет того, что при перемещении кривошипа 4 вправо он через зубчатое колесо 10, рейку 12 воздействует на поршень пневмоцилин0 дра 14, который, перемещаясь влево, преодолевает сопротивление рабочей среды, проходящей через дроссель 17.
Созданный при этом крутящий момент одновременно перемещает в правое поло5 жение и переворачивает люльку 1 со схватом 2 на 180°, обеспечивая переориентирование изделия вверх. Формула изобретения Перекладчик, содержащий люльку с ва0 куумным схватом, шарнирно связанные с ней основной и дополнительный кривошипы, первый из которых кинематически связан с реверсивным приводом, а также источник питания, отличающийся тем,
5 что, с целью расширения технологических возможностей за счет обеспечения переориентации изделия, он снабжен дополнительным реверсивным приводом, кинематически связанным с дополнительным кривошипом, при этом приводы под
ключены к источнику питания с возможно- тормозного крутящих моментов на выход- стью создания попеременных приводного и ных элементах приводов.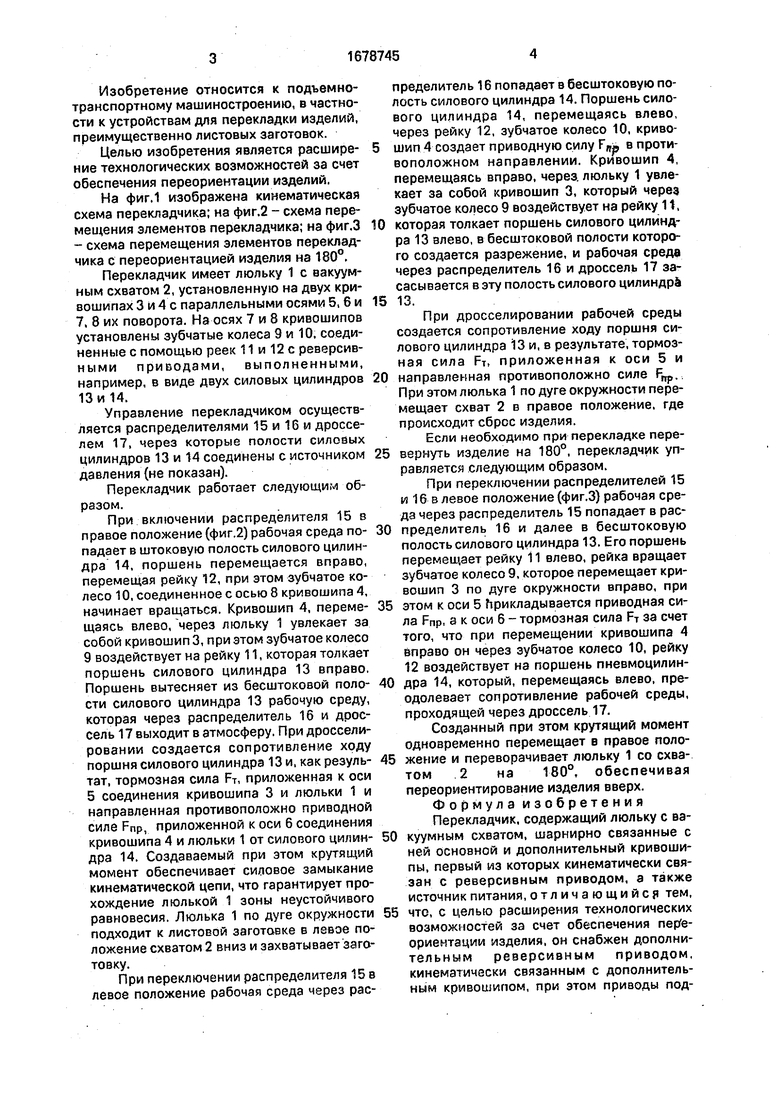
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Тормозной привод прицепа | 1988 |
|
SU1533919A2 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Кинематическая цепь обката зубообрабатывающего станка | 1978 |
|
SU770689A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам для перекладки изделий, преимущественно листовых заготовок. Целью изобретения является расширение технологических возможностей за счет обеспечения переворота заготовок. При включении привода 14 на создание приводного крутящего момента, а привода 13 на создание тормозного крутящего момента люльке 1 с вакуумным захватом 2 и заготовкой обеспечивается плоскопараллельное перемещение При включении привода 13 на создание приводного крутящего момента, а привода 14 на создание тормозного крутящего момента люльке 1 с вакуумным захватом 2 и заготовкой обеспечивается перемещение с переориентацией на 180°. 3 ил. 5 Ё С 00 VJ N ел Риг f
Фиг. 2
77
Фиг.З
| Автоматический вакуумный перекладчик грузов | 1983 |
|
SU1209559A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
