13
станка и рабочий орган 10 фиксируется на оправке инструментального блока. Одновременно с выталкиванием инструмента из шпинделя (собственным устройством станка) подается энергоноситель в привод 2 и поршень 7, сжимая пружину 8, и опускается до крайнего нижнего положения руки 4. Коническое колесо 11 входит в зацепление с колесом 12 стойки манипулятора. Инструмент полностью выведен из шпинделя станка. Затем энергоноситель подается в привод 3, и рука 4 поворачивается в сторону магазина инструментов. При этом одновременно поворачивается относительно руки 4 ведомое колесо 9 с рабочим органом 10, подводя его к свободному гнезду магазина. Инструмент оставляется в гнезде магазина (раскрывается рабочий орган 10), и рука 4 поднимается (без пово1
Изобретение относится к средствам манипулирования для перемещения изделий от места хранения к месту установки и обратно, и может быть использовано в различных отраслях про- мьшшенности дпя перемещения, например, обрабатываемых деталей или металлорежущих инструментов от магазинов их хранения к металлopeжyшJ м станкам и обратно.
Цель изобретения - упрощение конструкции манипулятора.
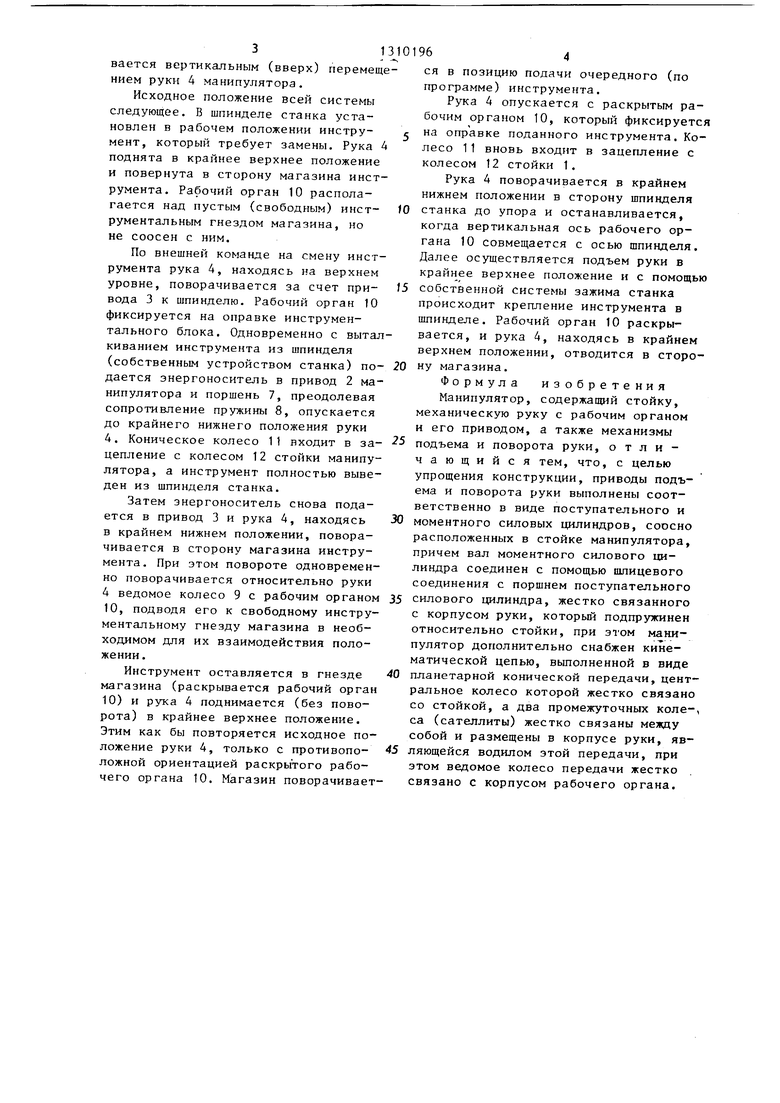
На фиг.1 представлена схема устройства манипулятора; на фиг.2 - вид А на фиг.1.
Стойка 1 снабжена встроенными в нее приводами подъема 2 и поворота 3 руки 4, выполненными соответственно в виде поступательного и моментного силовых цилиндров, соосно расположенных в стойке 1 манипулятора с возможностью поворота привода 2 подъема при вращении привода 3 поворота. Вал 5 лопасти 6 привода 3 соединен с поршнем 7 привода 2 подъема ишицевым или шпоночным подвижным соединением.
Поршень 7 подпруткинен пружиной 8 и несет на себе руку 4, на которой установлено ведомое коническое коле6
рота) в крайнее верхнее положение. Магазин повогГачивается в позицию поачи очередного (по программе) инструмента. Рука 4 опускается с раскрытым рабочим органом 10, который фиксируется на оправке инструмента. Колесо 11 вновь входит в зацепление с колесом 12 стойки 1. Рука 4 поворачивается в крайнем нижнем положении в сторону шпинделя станка до упора и останавливается, когда вертикальная ось рабочего органа 10 совместится с осью шпинделя. Далее осуществляется подъём руки в крайнее верхнее положение. С помощью собственной системы зажима станка происходит крепление инструмента в шпинделе. Рабочий орган 10 раскрывается и рука 4, находясь в крайнем верхнем положении, отводится в сторону магазина . 2 ил.
со 9, жестко связанное с корпусом рабочего органа 10.
Кинематическая цепь между приводом 3 поворота и рабочим органом 10 обеспечивается промежуточными коническими колесами 11, смонтированными в руке 4. Замыкание кинематической цепи осуществляется на центральном коническом колесе 12 стойки 1 в крайнем нижнем положении руки 4 при ее поступательном перемещении.
Подача энергоносителя (жидкость, воздух) в приводы подъема 2 и поворота 3 осуществляется по командам
от внешнего программного устройства (не показано).
Манипулятор работает следующим образом.
Манипулятор устанавливается на станине станка так, что при повороте руки 4 из одного крайнего положения в другое обеспечивается совмещение вертикальной оси рабочего органа 10 соответственно с осью шпинделя станка, или с осью инструментального гнезда магазина инструмента (магазин и станок не показаны). Установка инструмента в шпиндель станка обеспечи-
3
вается вертикальным (вверх) перемещ нием руки 4 манипулятора.
Исходное положение всей системы следующее. В шпинделе станка установлен в рабочем положении инструмент, который требует замены. Рука поднята в крайнее верхнее положение и повернута в сторону магазина инструмента. Рабочий орган 10 располагается над пустым (свободным) инструментальным гнездом магазина, но не соосен с ним.
По внешней команде на смену инструмента рука 4, находясь на верхнем уровне, поворачивается за счет привода 3 к шпинделю. Рабочий орган 10 фиксируется на оправке инструментального блока. Одновременно с выта киванием инструмента из шпинделя (собственным устройством станка) подается энергоноситель в привод 2 манипулятора и поршень 7, преодолевая сопротивление пружины 8, опускается до крайнего нижнего положения руки 4. Коническое колесо 11 входит в зацепление с колесом 12 стойки манипулятора, а инструмент полностью выведен из шпинделя станка.
Затем энергоноситель снова подается в привод 3 и рука 4, находясь в крайнем нижнем положении, поворачивается в сторону магазина инструмента. При этом повороте одновременно поворачивается относительно руки 4 ведомое колесо 9 с рабочим органо 10, подводя его к свободному инструментальному гнезду магазина в необходимом для их взаимодействия положении.
Инструмент оставляется в гнезде магазина (раскрывается рабочий орга 10) и рука 4 поднимается (без поворота) в крайнее верхнее положение. Этим как бы повторяется исходное положение руки 4, только с противоположной ориентацией раскрытого рабочего органа 10. Магазин поворачивае
ся в позицию подачи очередного (по программе) инструмента.
Рука 4 опускается с раскрытым рабочим органом 10, который фиксируется на оправке поданного инструмента. Колесо 11 вновь входит в зацепление с колесом 12 стойки 1.
Рука 4 поворачивается в крайнем нижнем положении в сторону шпинделя
0 станка до упора и останавливается, когда вертикальная ось рабочего органа 10 совмещается с осью шпинделя. Далее осуществляется подъем руки в крайнее верхнее положение и с помощью
5 собственной системы зажима станка происходит крепление инструмента в шпинделе. Рабочий орган 10 раскрывается, и рука 4, находясь в крайнем верхнем положении, отводится в сторону магазина.
Формула изобретения Манипулятор, содержащий стойку, механическую руку с рабочим органом и его приводом, а также механизмы подъема и поворота руки, отличающийся тем, что, с целью упрощения конструкции, приводы подъема и поворота руки выполнены соответственно в виде поступательного и моментного силовых цилиндров, соосно расположенных в стойке манипулятора, причем вал моментного силового цилиндра соединен с помощью шлицевого соединения с поршнем поступательного
5 силового цилиндра, жестко связанного с корпусом руки, которьв подпружинен относительно стойки, при этом манипулятор дополнительно снабжен кинематической цепью, выполненной в виде
0 планетарной конической передачи, центральное колесо которой жестко связано со стойкой, а два промежуточных кoлe- са (сателлиты) жестко связаны между собой и размещены в корпусе руки, являющейся водилом этой передачи, при этом ведомое колесо передачи жестко . связано с корпусом рабочего органа.
0
5
0
Ось шпинделя станка
ША,П
иг.2
Редактор И.Касарда
Составитель А.Позняк
Техред И.Попович Корректор Г.Решетник
Заказ 1854/1А Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4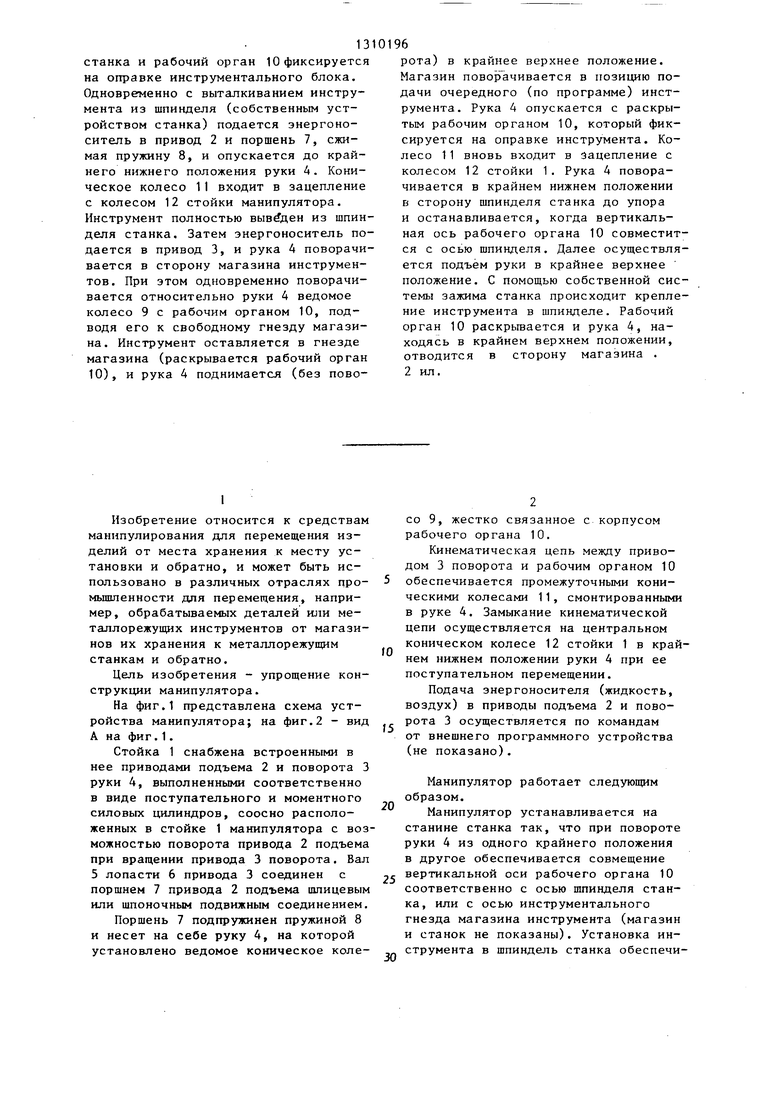
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1981 |
|
SU1034869A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Устройство для автоматической смены инструментов | 1986 |
|
SU1419850A1 |
| Манипулятор для автоматической смены инструмента | 1976 |
|
SU603557A1 |

Изобретение относится к средствам манипулирования в машиностроении и может быть использовано д-пя перемещения обрабатываемых деталей или режущих инструментов от магазинов их хранения к металлорежущим станкам и обратно. Целью изобретения является упрощение конструкции. По команде на смену инструмента рука 4 поворачивается за счет привода 3 к шпинделю I 1 1ФФ. v VtfпЦ&д Ю / с ДЗ (Л Инструмент Энергоноситель оо О со 05 /// / фиг. 1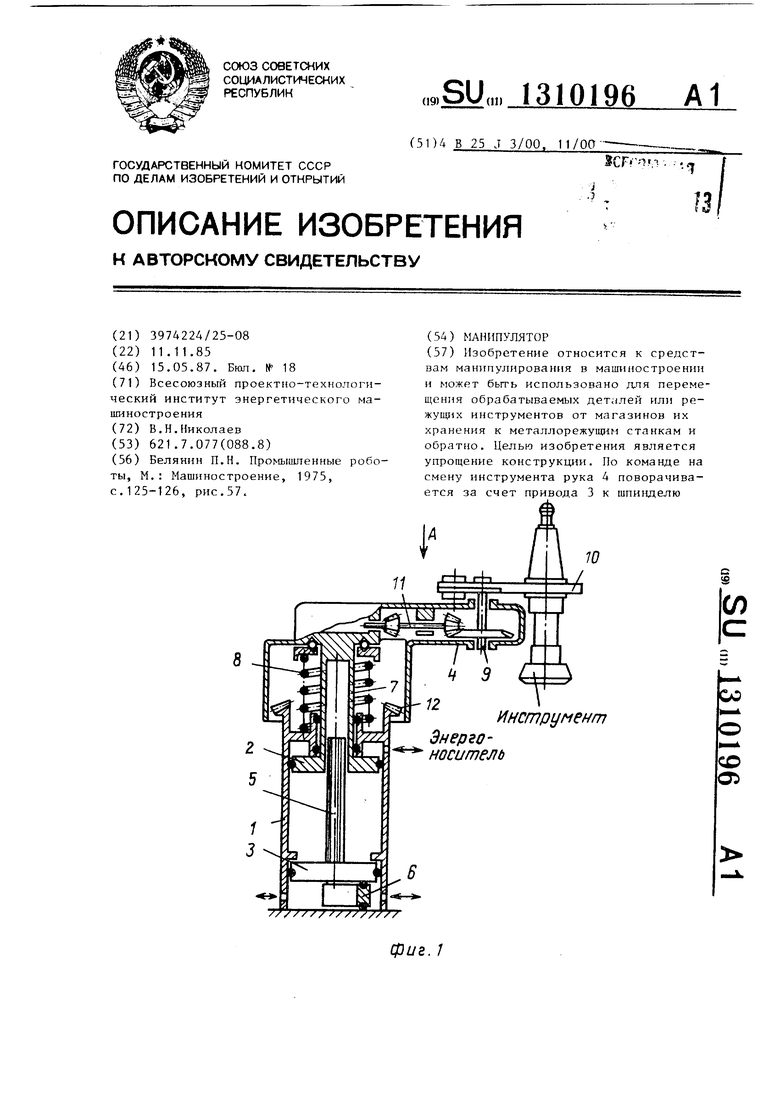
| Белянин П.Н | |||
| Промышленные роботы, М.: Машиностроение, 1975, с.125-126, рис.57 | |||
| у/ |
