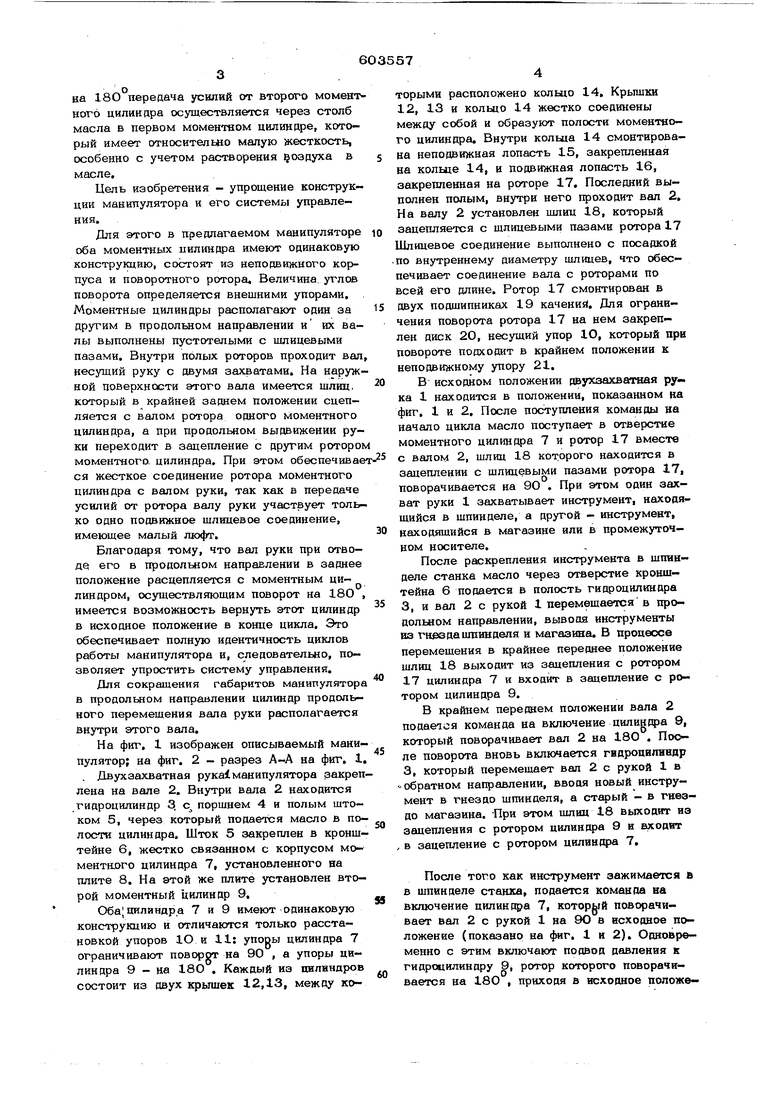
иа ISO передача усилий от второго момент ного цилиндра осуществляется через столб масла в первом моментном цилиндре, который имеет относительно малую жесткость, особенно с учетом растворения §оэдуха в масле. Цель изобретения - упрощение конструкции манипулятора и его системы управления. Для этого в предлагаемом манипуляторе оба моментных цилиндра имеют одинаковую конструкцию, состоят из неподвижного корпуса и поворотного ротора. Величина углов поворота определяется внешними упорами, Моментные цилиндры располагают один за другим в продольном направлении и их валы выполнены пустотелыми с шлицевыми пазами. Внутри полых роторов проходит вал несущий руку с двумя захватами. На наружной поверхности этого вала имеется щлиц. который в крайней заднем положении сцепляется с валом ротора одного моментного цилиндра, а при продольном выдвижении руки переходит в зацепление с другим ротором моментного. цилиндра. При этом обеспечивае ся жесткое соединение ротора моментного цилиндра с валом руки, так как в передаче усилий от ротора валу руки участвует только одно подвижное шлицевое соединение, имеющее малый люфт. Благодаря тому, что вал руки при отводу его Б продольном направлении в заднее положение расцепляется с моментным цилиндром, осуществляющим поворот на 180 , имеется возможность вернуть этот цилиндр в исходное положение в конце цикла. Это обеспечивает полную идентичность циклов работы манипулятора и, следовательно, позволяет упростить систему управления. Для сокращения габаритов манипулятора в продольном направлении цилиндр продольного перемещения вала руки располагается внутри этого вала. На фиг. 1 изображен описываемый манипулятор; на фиг. 2 - разрез А-А на фиг. 1. . Двухзахватная рука манипулятора закреп лена на вале 2. Внутри вала 2 находится гидроцилиндр 3 с порщнем 4 и полым щтоком 5, через который подается масло в по- лости цилиндра. Шток 5 закреплен в кронштейне 6, жестко связанном с корпусом мо- ментн.ого цилиндра 7, установленного на плите 8, На этой же плите установлен второй моментный цилиндр 9, Оба; цилиндра 7 и 9 имеют-одинаковую конструкцию и отличаются только расстановкой упоров Ю и 11: упооы цилиндра 7 ограничивают поворот на 90 , а упоры цилиндра 9 - на 180 . Каждый из цилиндров состоит из двух крышек 12,13, между которыми расположено кольцо 14, Крьпдки 12, 13 и кольцо 14 жестко соединены между собой и образуют полости моментно- го цилиндра. Внутри кольца 14 смонтирована неподвижная лопасть 15, закрепленная на кольце 14, и подвижная лопасть 16, закрепленная на роторе 17. Последний выполнен полым, внутри него проходит вал 2. На валу 2 установлен щлиц 18, который зацепляется с щлицевыми пазами ротора 17 Шлицевое соединение выполнено с посадкой по внутреннему диаметру шлицев, что обеспечивает соединение вала с роторами по всей его длине. Ротор 17 смонтирован в двух подшипниках 19 качений. Для ограничения поворота ротора 17 на нем закреплен диск 20, несущий упор 1О, который при повороте подходит в крайнем положении к неподвижному упору 21, В исходном положении дьухзахватная рука 1 находится в положении, показанном на фиг, 1 и 2, После поступления команды на начало цикла масло поступает в отверстие моментного цилиндра 7 и ротор 17 вместе с валом 2, шлиц 18 которого находится в зацеплении с щлицевыми пазами ротора 17, поворачивается на 90 . При этом один захват руки 1 захватывает инструмент, находящийся в шпинделе, а другой - инструмент, находящийся в магазине или в промежуточном носителе. После раскрепления инструмента в шпинделе станка масло через отверстие кронштейна 6 подается в полость гидроцилиндра 3, и вал 2 с рукой 1 перемещается в продольном направлении, выводя инструменты из гнездащпинделя и магазина. В процессе перемещения в крайнее переднее положение шлиц 18 выходит из зацепления с ротором 17 цилиндра 7 и входит в зацепление с ротором цилиндра 9. В крайнем переднем положении вала 2 пoдae oя команда на включение цилиндра 9, который поворачивает вал 2 на 180 . После поворота вновь включается гвдроцилиндр 3, который перемещает вал 2 с рукой 1 в Обратном направлении, вводя новый инструмент в гнездо щпинделя, а старый - в гнездо магазина, -При этом шлиц 18 выходит иа зацепления с ротором цилиндра 9 и входит в зацепление с ротором цилиндра 7. После того как инструмент зажимается в в шпинделе станка, подается команда на включение цилинсфа 7, который поворачивает вал 2 с рукой I на 9О в исходное положение (показано на фиг. 1 и 2). Одновременно с этим включают подвод давления к гидроцилиндру 9, ротор которого поворачивается на 180 , приходя в исходное положе- ние. Этот поворот не приводит к повороту вала 2, так как шлиц 18 вала 2 не находится в зацеплении с ротором цш1ИН{фа 9. Благодаря возврату всех цилиндров 3,7 и 9 в исходное положение, цшш управления устройством остается постоянным, т.е. нет четных и нечетных циклов. Формула изобретения 1. Манипулятор для автоматической сме ны инструмента в металлорежущих станках содержащий механизм поворота вала даухаахватной руки в.виде двух моментных цилиндров, отличающийся тем, чт с целью упрощения конструкции и системы управления, моментные цилиндры распсшожёны последовательно друг эа другом в направлении перемещш1ия руки, а их роторы выполнены полыми с ишииевыми пазами на внутренней поверхности, в которых расположен вал двухзахватной руки с выполненным на наружной поверхности шлицем, попеременно зацепляющимся с полыми роторами. 2. Манипулятор по п. 1,отлича ю- щ и и с я тем, что, с цепыо сокращения габаритов, цилиндр продольного перемещения расположен внутри вала двухзахватной руки. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 4О7708, кл. В 23 Q 3/155, 1972, 2. Авторское свидетельство СССР № 516506, кл, В 23 Q 3/155, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Манипулятор для автоматической смены инструмента | 1974 |
|
SU516506A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |
| Манипулятор для автоматической смены инструментов | 1980 |
|
SU867601A1 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Манипулятор | 1985 |
|
SU1310196A1 |
| Устройство для автоматической смены инструментов | 1979 |
|
SU854676A1 |
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Двухзахватная механическая рука | 1977 |
|
SU659357A1 |
