1П
Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к тягачам для поч- вообработки.
Цель Изобретения - обеспечение автоматического выравнивания загрузки ведущих колес при работе на косогоре.
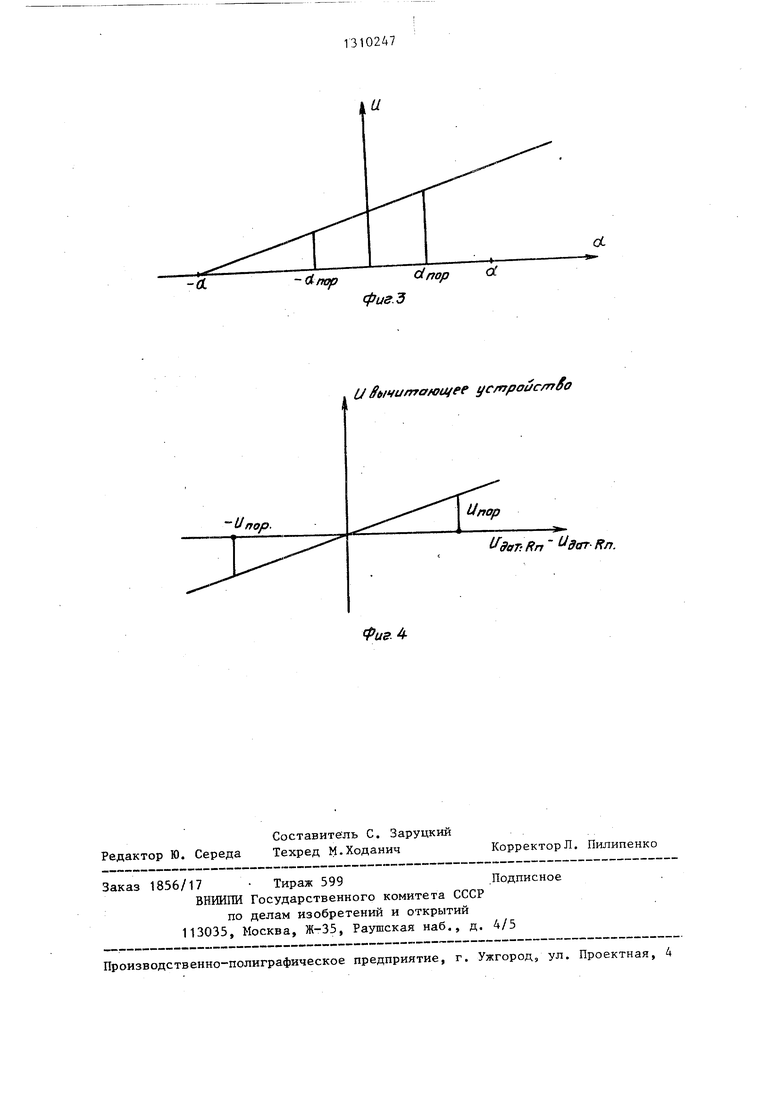
На фи1 . 1 показан тягач со стороны навески при движении на косогоре; на фиг. 2 - функциональная схема устройства управления положением навесного устройства в зависимости от тяги и распределения нагрузки по бортам -тягача; на фиг. 3 - схема зависимости сигнала, снимаемого с датчика углового положения от угла поворота навески; на фиг. 4 - схема сигнала на выходе вычитающего устройства
Тягач для почвообработки состоит из навесного устройства (навески) 1, рама 2 которой связана горизонтальным продольным шарниром 3 с остовом 4 тягача, а привод поперечно-углового подворота остова 4 относительно рамы 2 жестко связанной тягами навески с почвообрабатывающим заглубленным орудием, реализован с помощью гидроцилиндра 5.
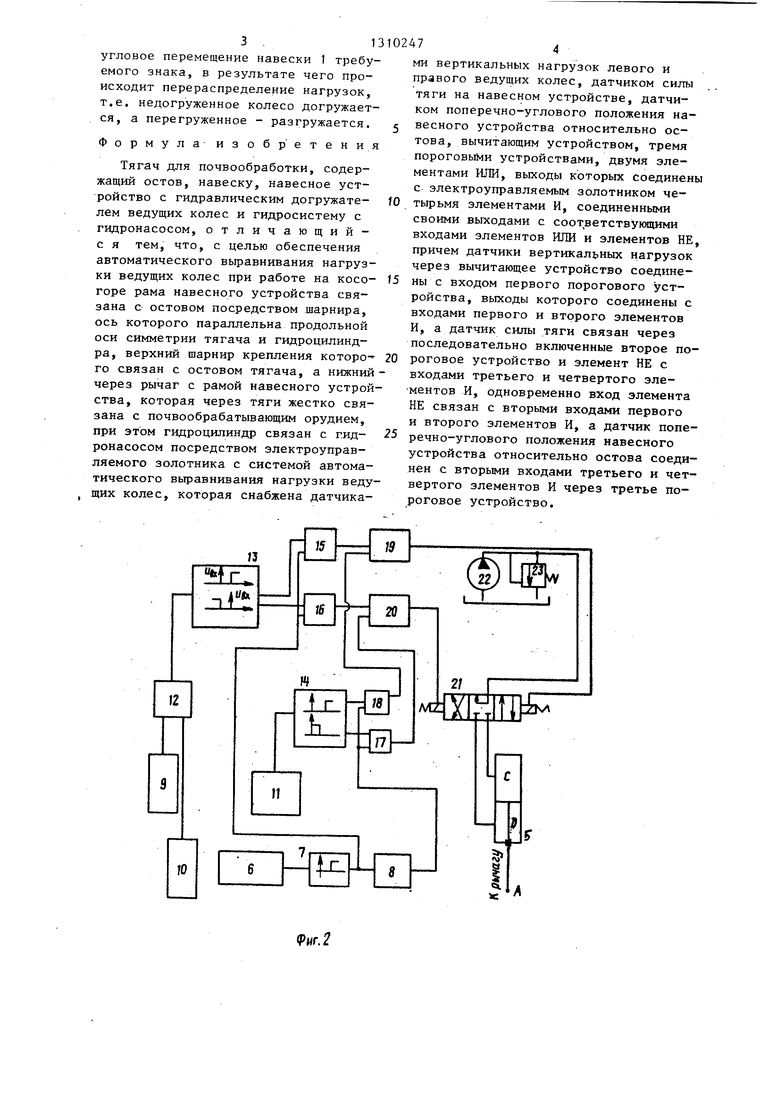
Система автоматического выравнивания нагрузки ведущих колес тягача содержит датчик 6 силы тяги на навеске 1, пороговое устройство 7,, элемент НЕ 8, датчики 9 и 10 вертикальных нагрузок ведущих колес тягача, датчик 11 углового положения навец- ки 1 относительно остова 4, вычитающее устройство 12, пороговые устройства 13 и 14, элементы И 15-18, элементы ИЛИ 19 и 20, электроуправля- емьй золотник 21, гидронасос 22 с предохранительным клапаном 23.
Тягач для почвообработки работает следующим образом.
При движении тягача с тяговой нагрузкой Рт5,г Рпароговыу1 а выходе порогового устройства 7 присутствует сигнал О, а на выходе элемента НЕ 8 - сигнал 1. Элемент НЕ 8 разрешает прохождение сигналов с выхода порогового устройства 14 на выход элементов И 17 и 18, а сигнал с порогового устройства 7 запрещает поступление сигналов с выхода порогового устройства 13, на выход элементов И 15 и 16. Таким образом, на выходе элементов ИЛИ 19 и 20, которые связаны с соответствующими электромагни2472
тами электроуправляемого золотника 21 присутствуют сигналы, поступающие с выхода порогового устройства 14. Датчик 11 углового положения навески 1
с относительно остова 4, например по- тенциометрический, выдает аналоговый сигнал, величина которого пропорциональна углу поворота навески 1.
Если при движении тягача оказыва10 ется, что угол d поворота навески 1 больше, чем oL пороговое, величина которого может быть выбрана с учетом необходимой точности установки навески 1 в вертикальное положение, то на
5 входе элемента И 18 присутствует сигнал 1, а на входе элемента И 17 - О. Сигналы поступают на выход элементов И 17 и 18, через элементы ИЛИ 19 и 20 воздействуют на электро20 магниты электроуправляемого золотника 21, что вызывает перемещение поршня силового гидроцилиндра 5, шток которого связан lepes тягу с навеской 1. Устройство управления положе 5 нием навески 1 начинает изменять угол
положения навески 1 и при о с порог
, на выходах порогового устройства 14
появятся сигналы О, в итоге электроуправляемый золотник 21 занимает
30 среднее положение и разъединяет рабочую полость С с источником давления, а рабочую полость D со сливом.
Таким образом, при движении тягача
t с нагрузкой меньше навеска 1 занимает Положение с точностью, определяемой пороговым устройством 14 и точностью датчика 11 углового положения навески 1. При этом устанавли4С ваются равные давления в рабочих полостях С и D силового цилиндра 5, которые определяются гидронасосом 22, что в конечном итоге не позволяет перемещаться навеске и тягач двигается
45 с углом поворота навески 1 относительно остова 4 Ы |t dnopl
В общем случае, если нагрузка левого колеса больше, чем пр-авого, то на выходе вычитающего устройства 12
50 присутствует отрицательный сигнал, если меньше - положительный. Причем, если абсолютная величина разностного сигнала больще, чем выходе порогового устройства 13 будет
55 соответствующий сигнал. В результате чрго, электроуправляемый золотник 21 срабатывает и соединяет одну полость гидроцилиндра 5 с гидронасосом 22, а другую - со сливом, что вызывает
3 .1310247
угловое перемещение навески 1 требуемого знака, в результате чего происходит перераспределение нагрузок, т.е. недогруженное колесо догружается, а перегруженное - разгружается. г
Формула изобретения
Тягач для почвообработки, содержащий остов, навеску, навесное устройство с гидравлическим догружате- fO лем ведущих колес и гидросистему с гидронасосом, отличающий- с я тем, что, с целью обеспечения автоматического вьфавнивания нагрузки ведущих колес при работе на косо- 15 горе рама навесного устройства связана с остовом посредством шарнира, ось которого параллельна продольной оси симметрии тягача и гидроцилиндра, верхний шарнир крепления которо- 20 го связан с остовом тягача, а нижний - через рычаг с рамой навесного устройства, которая через тяги жестко связана с почвообрабатывающим орудием, при этом гидроцилиндр связан с гид- 25 ронасосом посредством электроуправ- ляемого золотника с системой автоматического выравнивания нагрузки веду- щих колес, которая снабжена датчикамипр тя ко ве то по ме с ты св вх пр че ны ро вх И, по ро вх ме НЕ и ре ус не ве ро
ми вертикальных нагрузок левого и правого ведущих колес, датчиком силы тяги на навесном устройстве, датчиком поперечно-углового положения навесного устройства относительно остова, вычитающим устройством, тремя пороговыми устройствами, двумя элементами ИЛИ, выходы которых соединены с электроуправляемым золотником четырьмя элементами И, соединенными своими выходами с соот ветствующими входами элементов ИЛИ и элементов НЕ, причем датчики вертикальных нагрузок через вычитающее устройство соединены с входом первого порогового устройства, выходы которого соединены с входами первого и второго элементов И, а датчик силы тяги связан через последовательно включенные второе пороговое устройство и элемент НЕ с входами третьего и четвертого элементов И, одновременно вход элемента НЕ связан с вторыми входами первого и второго элементов И, а датчик поперечно-углового положения навесного устройства относительно остова соединен с вторыми входами третьего и четвертого элементов И через третье пороговое устройство.
-а.-cf/и ffop
фиг-Ъ
и ffifiHumafotj ee устраас/гт о
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Машинно-тракторный агрегат | 1979 |
|
SU770902A1 |
| Сельскохозяйственный агрегат | 1984 |
|
SU1194300A1 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1324598A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| Устройство для стабилизации курса сельскохозяйственного агрегата | 1983 |
|
SU1160957A1 |
| МЕХАНИЗМ ВЫРАВНИВАНИЯ НАГРУЗКИ ПО ОПОРНОЙ ПОВЕРХНОСТИ ТРАКТОРА | 2002 |
|
RU2236978C2 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Колесный сельскохозяйственный трактор | 1987 |
|
SU1419542A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОЛЕСНЫЙ ТРАКТОР | 1999 |
|
RU2162625C2 |
Изобретение относится к тракторному и сельскохозяйственному машиностроению.. Цель изобретения - обеспечение автоматического выравнивания нагрузки ведущих колес тягача при ра- боте на косогоре. Рама 2 навесного устройства связана с остовом 4 тягача посредством шарнира 3, ось которого параллельна продольной оси симметрии тягача и гидроцилиндра 5,верхний шарнир крепления которого связан с остовом 4 тягача, а нижний через рычаг - с рамой навесного устройства, жестко связанной с почнообрабатьгоаю- щим орудием. Автоматическое выравнивание нагрузки ведущих колес осуществляется за счет системы автоматического управления положением штока гидроцилиндра 5, содержащей датчики вертикальной нагрузки левого и правого ведущих колес тягача, датчик силы тяги, датчик углового положения навески 1 относительно остова 4, логическую схему соответствующей обработки их сигналов и электроуправля- емый золотник. Гидроцилиндр 5 поворачивает остов 4 относительно навесного устройства почвообрабатывающего орудия на некоторый угол в зависимости от соотношения сигналов от перечисленных датчиков. 4 ил. е (О со ю Pi 
Unop
U 9aT:Kn дат Кп.
Редактор Ю. Середа
Составитель С. Заруцкий Техред М.Ходанич
Заказ 1856/17 Тираж 599Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fpus. 4
Корректор Л. Пилипенко
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Техническое | |||
| описание и инструкция по эксплуатации | |||
| Минск: Ураджай, 1981, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
