Изобретение относится к устройствам для передачи длинномерных грузов с одной технологической позиции на другие.
Целью изобретения является расширение технологических возможностей за счет приведения в действие поворотных рычагов в необходимый момент времени и унроще- ние конструкции устройства.
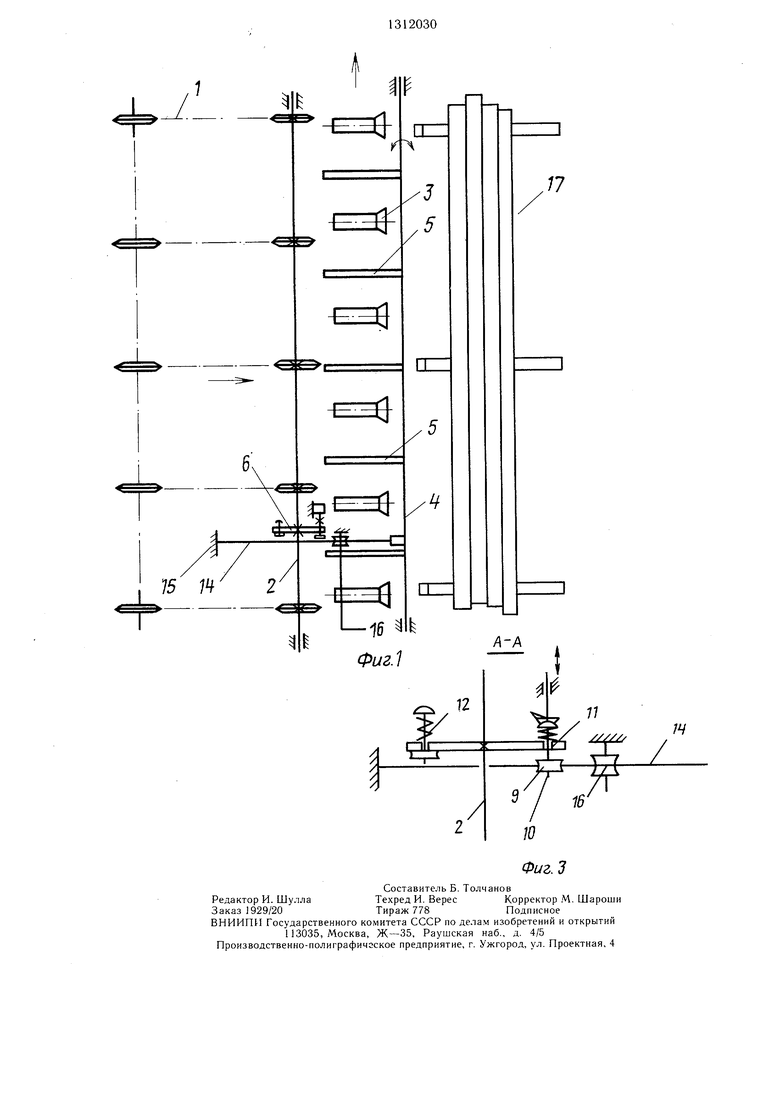
На фиг. 1 изображено схематически предлагаемое устройство, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 2.
Устройство содержит подающий поперечный конвейер 1 с приводным валом 2, установленные на выходной позиции подающего поперечного конвейера, приводной рольганг 3 для продольного перемещения грузов и перекладчик, выполненный в виде установленных на горизонтальном валу 4 поворотных рычагов 5 с рабочим 6 и нерабочим 7 плечами. В исходном положении плечо 6 рычага 5 располагается между роликами рольганга 3. Рычаги 5 соединены с приводным валом через кинематическую связь, выполненную в виде жестко закрепленного на приводном валу 2 подающего поперечного конвейера диска 8 с консоль- но установленными на его боковой поверхности и расположенными по концентрической окружности роликами 9. Оси 10 роликов 9 пропущены в отверстии 11 на диске 8 и снабжены пружинами 12, прижимающими ролики к боковой поверхности диска.
Ролики выполнены подвижными с возможностью осевого перемещения при взаимодействии их осей 10 со средством осевого их перемещения в виде толкателя 13 (не показан). Привод толкателей 13 может быть осуществлен от электромагнита и содержит датчик положения роликов 9 относительно толкателя 13 (не показаны).
В кинематическую связь также входит гибкий элемент, например канат 14, пропущенный параллельно боковой поверхности диска 8 на расстоянии от последнего, равном величине осевого перемещения роликов 9. Один конец каната 14 прикреплен к основанию 15, а другой - к плечу 7 одного из рычагов 5. Устройство также снабжено направляющим роликом 16 и лесонакопите- лем 17.
Устройство работает следующим образом.
В исходном положении плечо 6 рычага 5 занимает горизонтальное положение и размещается между роликами продольного рольганга 3. В этом положении все ролики 9 прижаты к боковой поверхности диска 8, а канат 14 находится в натянутом состоянии и проходит вблизи от оси диска 8.
Бревна подающим поперечным конвейером 1 подаются на рольганг 3, которым затем перемещаются в продольном направлении на одну из технологических позиций. Для передачи бревен на другую технологическую позицию, например в лесонакопитель 17, оператор включает электромагнитный
привод осевого перемещения толкателя 13. Диск 8 вращаясь вместе с приводным валом 2 конвейера 1, надвигает на толкатель 13 один из роликов 9. Последний, взаимодействуя с толкателем своей осью 10, переме,. щается в осевом направлении и входит в контакт с канатом 14. При дальнейшем вращении диска 8 ролик 9, обкатываясь по канату 14, натягивает последний, а тот поворачивает рычаги 5, закреп.ленные на горизонтальном валу 4, осуществляя передачу
5 бревен в накопитель 17.
При дальнейшем вращении диска 8 ролик 9 выходит из зацепления с канатом 14 и посредством пружины 12 занимает исходное положение, прижимаясь к боковой поверхности диска 8. Под действием собственного
0 веса рычаги 5 также занимают исходное положение.
Формула изобретения
51. Устройство для передачи длинномерных грузов с подаюп|его поперечного конвейера на два технологических потока, включаю цее установленный на выходе подающего поперечного конвейера перекладчик в виде установленных на горизонталь0 но валу, смонтированном на основании, поворотных рычагов, соединенных через кинематическую связь с приводным валом подающего поперечного конвейера, отличающееся тем, что, с целью расширения технологических возможностей за счет приведения в
5 действие поворотных рычагов в необходимый момент времени, кинематическая связь поворотных рычагов с приводным валом выполнена в виде жестко закрепленного на приводном валу подаюпхего поперечного конвейера диска с консольно установленными посредством осей на его боковой поверхности и расположенными по концентрической окружности подвижными подпружиненными роликами, имеющими средство для осевого перемещения последних, и установленного с
5 возможностью взаимодействия с подвижными подпружиненными роликами гибкого элемента, расположенн : 1ми параллельно боковой поверхности диска на расстоянии от последнего, равном величине осевого перемещения подвижного подпружиненного ро0 лика, при этом один из поворотных рычагов выполнен двуплечим, а гибкий элемент одним концом закреплен на основании, а другим - на плече рычага, не взаи.модействующем с длинномерными грузами.
2. Устройство по п. 1, отличающееся тем,
5 что гибкий элемент выполнен в виде каната.
0
77
Л-А
Фиг.д
Составитель Б. Толчанов
Редактор И. ШуллаТехред И. ВересКорректор М. Шароши
Заказ 1929/20Тираж 778Подписное
ВНИИПИ Государствениого комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфичгское предприятие, г. Ужгород, ул. Проектная, 4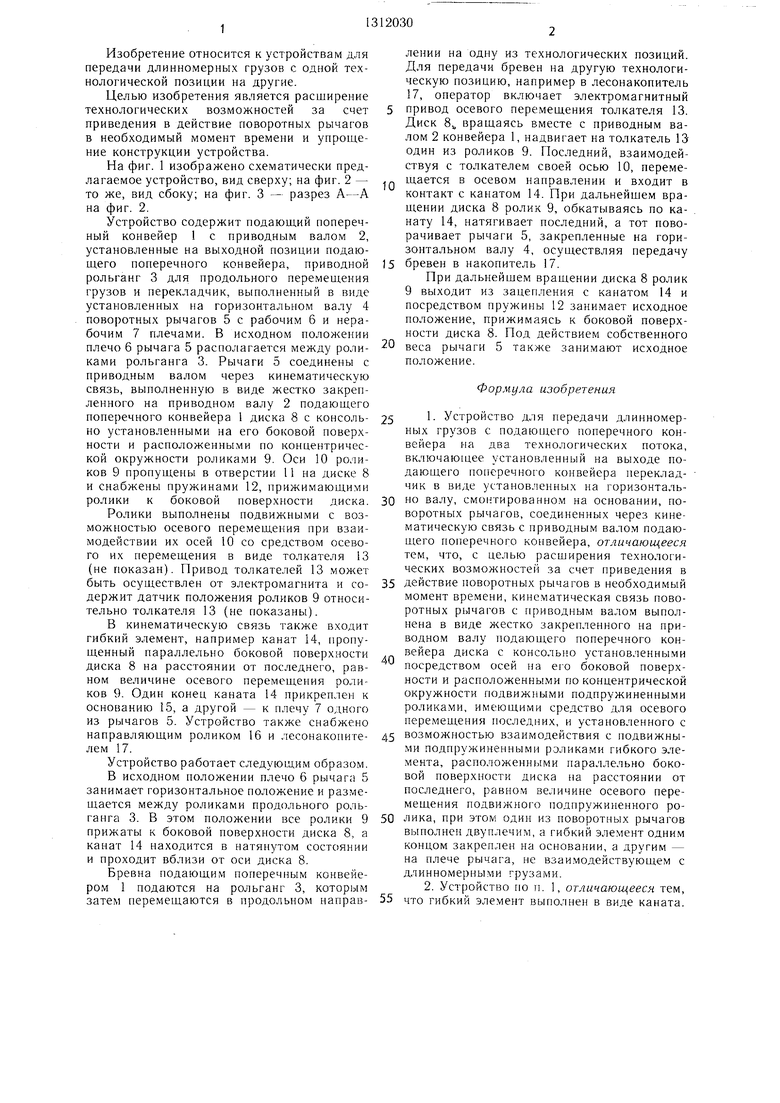
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования пакета стержнеобразных изделий и устройство для его осуществления | 1981 |
|
SU1008086A1 |
| Сбрасыватель длинномерных грузов с рольганга | 1981 |
|
SU1002213A2 |
| Станок для окорки и раскалывания лесоматериалов,ножевая головка для раскалывания лесоматериалов,нажимная плита механизма надвигания,окорочная фреза,механизм поворота лесоматериалов и загрузочное приспособление окорочного станка | 1981 |
|
SU1009765A1 |
| Устройство для сортировки бревен по диаметру | 1960 |
|
SU133808A1 |
| Поточная линия для обработки штучных длинномерных изделий | 1979 |
|
SU880505A1 |
| Устройство для выравнивания на конвейере длинномерных грузов | 1982 |
|
SU1066915A1 |
| Ролик рольганга | 1980 |
|
SU882873A1 |
| Автоматическая линия для химико-термической обработки длинномерных деталей | 1989 |
|
SU1710588A1 |
| Машина для формирования пакетов длинномерных грузов (ее варианты) | 1980 |
|
SU984964A1 |
| Устройство для перемещения и сбрасывания длинномерных грузов | 1983 |
|
SU1142381A1 |
Изобретение относится к конвейерному транспорту и позволяет расширить технологические возможности за счет приведения в действие поворотных рычагов в необходимый момент времени. На выходе подаю- ш,его поперечного конвейера установлен переукладчик устройства в виде установленных на горизонтальном валу, смонтированном на основании, поворотных рычагов (Р) 5, один из которых двуплечий. Через кинематическую связь Р 5 соединены с приводным ва1 лом подаюш,его конвейера. Кинематическая связь выполнена в виде жестко закрепленного на приводном валу конвейера диска 8 с консольно установленными посредством осей на его боковой поверхности и расположенными по концентрической окружности подвижными подпружиненными роликами (ПР) 9 и гибкого элемента в виде канала (К) 14. Он расположен параллельно боковой поверхности диска 8 на расстоянии от диска 8, равном величине осевого пере- меш,ения ПР 9. Одним концом К 14 закреплен на основании 15, другим - на плече Р 5, не взаимодействуюшем с длинномерными грузами. Причем ПР 9 имеют средство их осевого перемещения в виде толкателя. Для передачи бревен, например, в лесонакопи- тель 17 оператор включает привод толкателя. Диск 8, врашаясь вместе с приводным валом подающего конвейера, надвигает на толкатель один из ПР 9. Взаимодействуя с толкателем своей осью, ПР 9 перемещается в осевом направлении и входит в контакт с К 14. При дальнейшем вращении диска 8 ПР 9, обкатываясь по К 14, натягивает его и К 14 поворачивает Р 5, осуществляя передачу бревен в накопитель 17. 1 з.п.ф-лы. 3 ил. 5.i (Л со о со о Фиг. 2
| Сбрасыватель длинномерных материалов с рольганга | 1978 |
|
SU963937A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для сортировки лесоматериалов | 1978 |
|
SU695727A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
