верстие 9 в скип 1, В ходе разгрузки Б5 ограничено перемещается вниз. Перемещение Б5 определяют по результатам измерений перемещения скипа 1 в ходе предьщущих операций его загрузки. Перемещение Б5 осуществляют в соответствии с отслеживаемым перемещением скипа 1. Во время разгрузки Б5 сообщают движение по траектории, являющейся фз.-нкцией времени. Эта траектория совпадает с крайними точками колебательного движения скипа 1. При этом сохраняется минимальное расстояние между границами загрузочного отверстия 9 скипа 1 и раз1
Изобретение относится к способу перегрузки материала, в частности к перегрузке таких материалов, как руда или горная порода в шахтах.
Целью изобретения является повышение эффективности перегрузки и эффективности работы устройства.
На фиг.1 изображено предлагаемое устройство для перегрузки материала вид сбоку; на фиг. 2 - график, отражающий перемещение скипа в устройстве в ходе операции нагрузки; на фиг. 3-6 - схемы управления, используемые в устройстве.
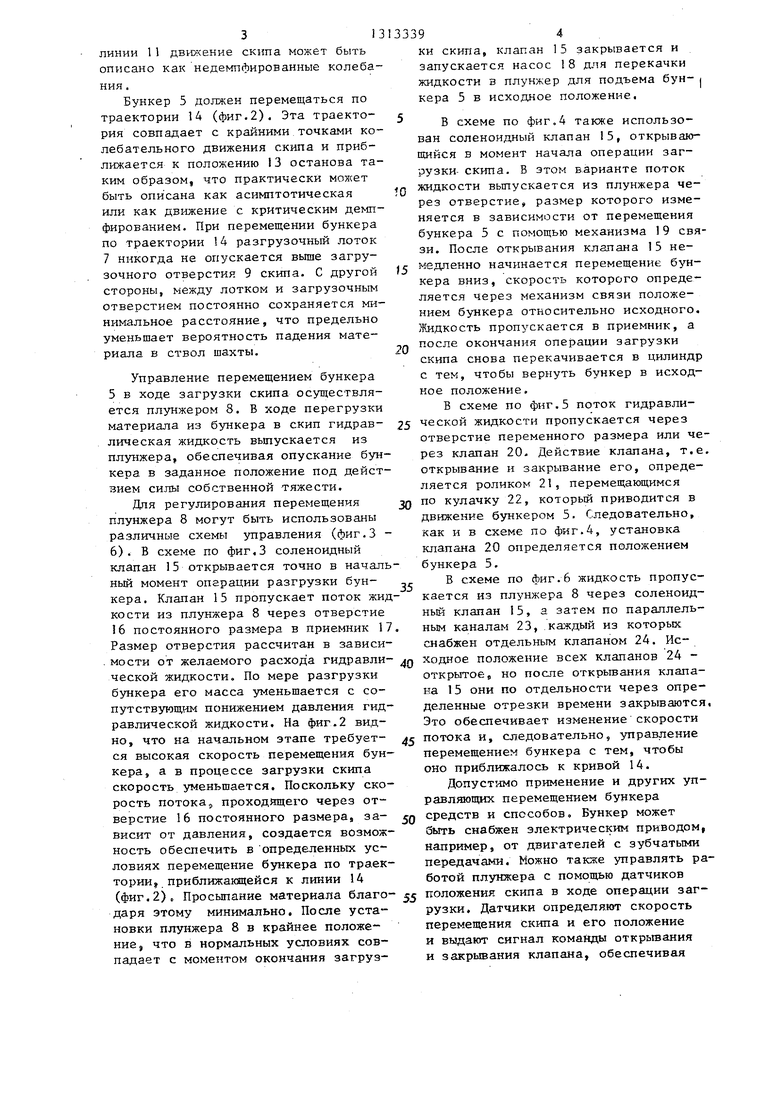
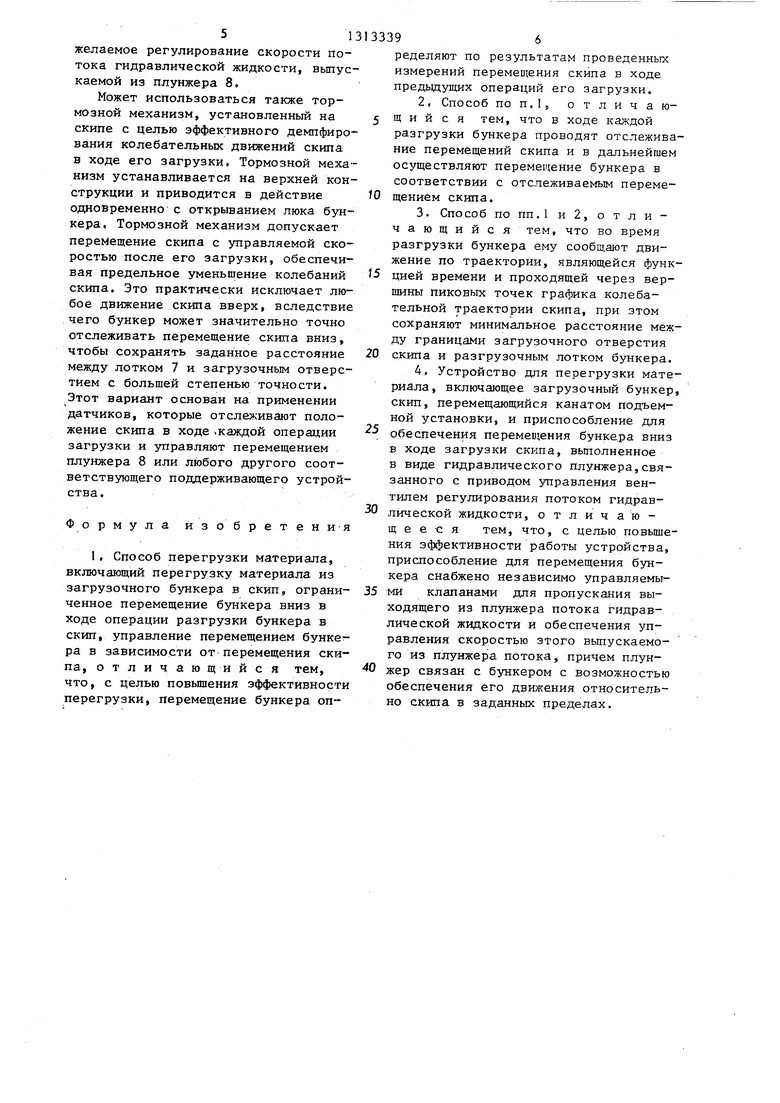
Устройство располагается под землей (фиг.1) и содержит скип 1, установленный в стволе шахты 2 с возможностью перемещения по вертикали. Скип подвешен на тросе 3, приводимом в. движение подъемным устройством (не показано). Для загрузки скип подводится к станции 4 загрузки, расположенной у подошвы ствола шахты.
Станция загрузки имеет загрузоч- ньш бункер 5 и один или более транспортеров 6 для подачи материал, т.е породы или руды, в бункер 5. Последний содержит разгрузочный лоток 7 и механизм управления открьгоанием и закрыванием люка бункера, ведущего к лотку 7. Бункер поддерживается одним или более установленными вер- тикапьно плунжерами 8,
грузочным лотком Б5. Для перемещения Б5 вниз служит приспособление, вьшол- ненное в виде гидравлического плунжера 8, связанного с приводом управления вентилем регулирования потоком гидравлической жидкости., Дополнительно приспособление для перемещения Б5 снабжено независимо управляемыми клапанами для пропускания выходящего из плунжера 8 потока гидравлической жидкости и обеспечения управления скоростью этого потока. Плунжер 8 связан с Б5 с возможностью обеспечения его движения относительно скипа 1. 2 с. и 2 з.п. ф-лы, 6 ил.
График (фиг.2) отражает перемещение скипа 1 в ходе загрузки в него материала из бункера 5. Практически операция загрузки производится автоматически, и запуск ее осуществляется известным способом после того, как установленный на бункере датчик показывает, что скип 1 занимает относительно бункера 5 рабоче е
положение загрузки. В этом положении загрузочное отверстие 9 на верхнем конце скипа практически совмещено с лотком; 7 и контактирует с ним. Датчик выдает сигнал к управляклцему средству для приведения в действие механизма 10, открывающего люк бункера. После этого материал под действием силы тяжести перегружается из бункера через загрузочное
отверстие 9 в скип 1. Операция перегрузки осуществляется очень быстро, примерно за 2 с. После разгрузки бункера 5 его люк закрьтается механизмом 10.
Мгновенное падение материала в скип создает ударную или импульсную нагрузку на скип. Трос 3 несколько вытягивается, а скип при погружении
на глубину ствола шахты колеблется. Сплошная линия 1 (фиг.2) отражает это движение скипа 1 в ходе операции загрузки с одновременным опусканием его из положения 12 загрузки
в положение 13 останова, в котором скип окончательно загружен.Согласно
313133394
линии П скипа может быть ки скипа, клапан 15 закрывается и описано как недемпфированные колеба- запускается насос 18 для перекачки НИН.жидкости в плунжер для подъема буиБункер 5 должен перемещаться по кера 5 в исходное положение,
траектории 14 (фиг.2). Эта траекто- s , /
- В схеме по фиг,ч также использо- рия совпадает с крайними точками колебательного движения скипа и приб- « соленоидный клапан 15, открываю- лижается. к положению 13 останова та- ся в момент начала операции заг- ким образом, что практически может скипа. В этом варианте поток быть описана как асимптотическая 10 жидкости выпускается из плунжера че- или как движение с критическим демп- Р отверстие, размер которого изме- фированием. При перемещении бункера яется в зависимости от перемещения по траектории 14 разгрузочный лоток бункера 5 с помощью механизма 19 свя- 7 никогда не опускается вьппе загру- - ° открывания клалана 15 не- зочного отверстия 9 скипа. С другой 15 едленно начинается перемещение бун- стороны, между лотком и загрузочным Р З скорость которого опреде- отверстием постоянно сохраняется ми- Р механизм связи положе- нимальное расстояние, что предельно « бункера относительно исходного, уменьшает вероятность падения мате- Жлдкость пропускается в приемник, а риала в ствол шахты.20 ° окончания операции загрузки
скипа снова перекачивается в цилиндр
Управление перемещением бункера с тем, чтобы вернуть бункер в исход- 5 в ходе загрузки скипа осуществля- ное положение.
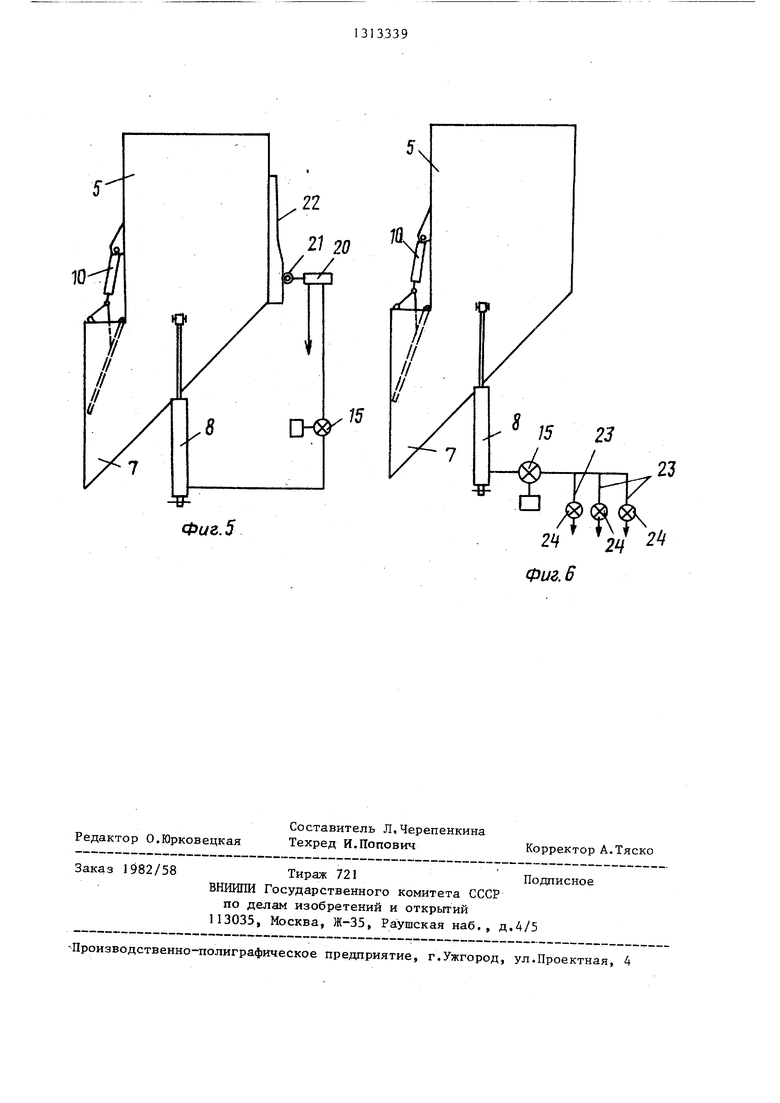
ется плунжером 8. В ходе перегрузки В схеме по фиг.5 поток гидравли- материала из бункера в скип гидрав- 25 ческой жидкости пропускается через лическая жидкость выпускается из отверстие переменного размера или че- плунжера, обеспечивая опускание буи- рез клапан 20. Действие клапана, т.е. кера в заданное положение под деист- открывание и закрывание его, опреде- зием силы собственной тяжести. ляется роликом 21, перемещающимся
Для регулирования перемещения jg по кулачку 22, который приводится в плунжера 8 могут быть использованы движение бункером 5. Следовательно, различные схемы управления (фиг.З - как и в схеме по фиг.4, установка 6). В схеме по фиг.З соленоидный клапана 20 определяется положением клапан 15 открывается точно в началь- бункера 5.
ный момент операции разгрузки бун- , В схеме по фиг.6 жидкость пропус- кера. Клапан 15 пропускает поток жид- кается из плунжера 8 через соленоид- кости из плунжера 8 через отверстие ньй клапан 15, а затем по параллель- 16 постоянного размера в приемник 17. ным каналам 23, каждый из которых Размер отверстия рассчитан в зависи- снабжен отдельным клапаном 24. Ис- мости от желаемого расхода гидравли- д ходкое положение всех клапанов 24 - ческой жидкости. По мере разгрузки открытое, но после открывания клапа- бункера его масса уменьшается с со- на 15 они по отдельности через опре- путствующим понижением давления гид- деленные отрезки времени закрываются, равлической жидкости. На фиг.2 вид- Это обеспечивает изменение скорости но, что на начальном этапе требует- потока и, следовательно, управление ся высокая скорость перемещения бун- перемещением бункера с тем, чтобы кера, а в процессе загрузки скипа оно приближалось к кривой 14. скорость уменьшается. Поскольку ско- Допустимо применение и других уп- рость потока, проходящего через от- равняющих перемещением бункера верстие 16 постоянного размера, за- д средств и способов. Бункер может висит от давления, создается возмож- быть снабжен электрическим приводом, ность обеспечить в определенных ус- например, от двигателей с зубчатыми ловиях перемещение бункера по траек- передачами. Можно также управлять ра- тории, приближающейся к линии 14 ботой плунжера с помощью датчиков (фиг.2). Просыпание материала благо- 55 положения скипа в ходе операции заг- даря этому минимально. После уста- рузки. Датчики определяют скорость новки плунжера В в крайнее положе- перемещения скипа и его положение ние, что в нормальных условиях сов- и выдают сигнал комайды открьшания падает с моментом окончания загруз- и закрьгоания клапана, обеспечивая
51
желаемое регулирование скорости потока гидравлической жидкости, выпускаемой из плунжера 8,
Может использоваться таюте тормозной механизм, установленный на скипе с целью эффективного демпфирования колебательньк движений скипа в ходе его загрузки. Тормозной механизм устанавливается на верхней конструкции и приводится в действие одновременно с открыванием люка бункера. Тормозной механизм допускает перемещение скипа с управляемой скоростью после его загрузки, обеспечивая предельное уменьшение колебаний скипа. Это практически исключает любое движение скипа вверх, вследствие чего бункер может значительно точно отслеживать перемещение скипа вниз, чтобы сохранять заданное расстояние между лотком 7 и загрузочным отверстием с большей степенью точности. Этот вариант основан на применении датчиков, которые отслеживают положение скипа в ходе «каждой операции загрузки и управляют перемещением плунжера 8 или любого другого соответствующего поддерживающего устройства.
Формула изобретения
1, Способ перегрузки материала, включающий перегрузку материала из загрузочного бункера в скип ограниченное перемещение бункера вниз в ходе операции разгрузки бункера в скип, управление перемещением бункера в зависимости от перемещения скипа, отличающийся тем, что, с целью повьщ1ения эффективности перегрузки, перемещение бункера оп96
ределяют по результатам проведенньгх измерений перемещения скипа в ходе предыдуш 1х операций его загрузки.
2.Способ non.I, отличаю- щ и и с я тем, что в ходе каждой
разгрузки бункера проводят отслеживание перемещений скипа и в дальнейшем осуществляют перемещение бункера в соответствии с отслеживаемым переме- щением скипа.
3.Способ ПОПП.1 и2, отличающийся тем, что во время разгрузки бункера ему сообщают движение по траектории, являющейся функцией времени и проходящей через вершины пиковых точек графика колебательной траектории скипа, при этом сохраняют минимальное расстояние между границами загрузочного отверстия
скипа и разгрузочным лотком бункера.
4.Устройство для перегрузки материала, включшощее загрузочный бункер, скип, перемещающийся канатом подъемной установки, и приспособление для
обеспечения перемещения бункера вниз в ходе загрузки скипа, выполненное в виде гидравлического плунжера,связанного с приводом управления вентилем регулирования потоком гидравлнческой жидкости, отличающееся тем, что, с целью повьше- ния эффективности работы устройства, приспособление; для перемещения бункера снабжено независимо управляемыми клапанами для пропускания выходящего из плунжера потока гидравлической жидкости и обеспечения управления скоростью зтого вьтускаемо- го из плунжера потока причем плунжер связан с бункером с возможностью обеспечения его движения относительно скипа в заданных пределах.
Фи9.2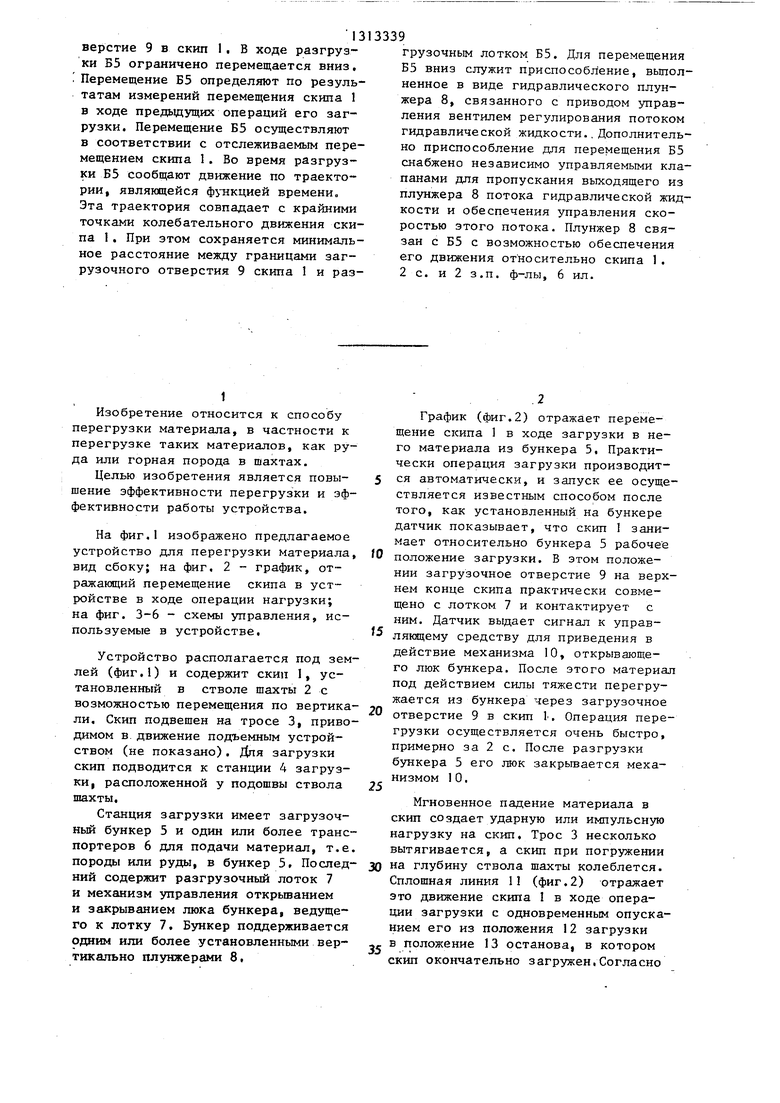
| название | год | авторы | номер документа |
|---|---|---|---|
| Проходческий перегружатель | 1983 |
|
SU1139184A1 |
| Подъемная скиповая установка | 1987 |
|
SU1579451A3 |
| Самоходный комбайн | 1980 |
|
SU921447A3 |
| Устройство для обеспыливания места перегрузки сыпучего материала из скипа | 1983 |
|
SU1132027A1 |
| ПРЕСС-ПОДБОРЩИК И СПОСОБ УСОВЕРШЕНСТВОВАННОГО МАНИПУЛИРОВАНИЯ ТЮКОМ | 2015 |
|
RU2697048C2 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1990 |
|
RU2057944C1 |
| Способ загрузки доменной печи | 1979 |
|
SU775129A1 |
| Механизированный бункер | 1972 |
|
SU597859A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ, В ЧАСТНОСТИ ПНЕВМАТИЧЕСКАЯ ТЕЛЕЖКА ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ СЕЯЛКИ | 2006 |
|
RU2426294C2 |
| Загрузочное устройство доменнойпЕчи | 1979 |
|
SU808533A1 |
Изобретение относится к способу перегрузки материалов таких, как руда или горная порода в шахтах, и повышает эффективность перегрузки и работы устр-ва. Скип 1 занимает относительно бункера (Б) 5 рабочее положение загрузки. После этого, материал под действием силы тяжести перегружается из Б5 через загрузочное отО) с ы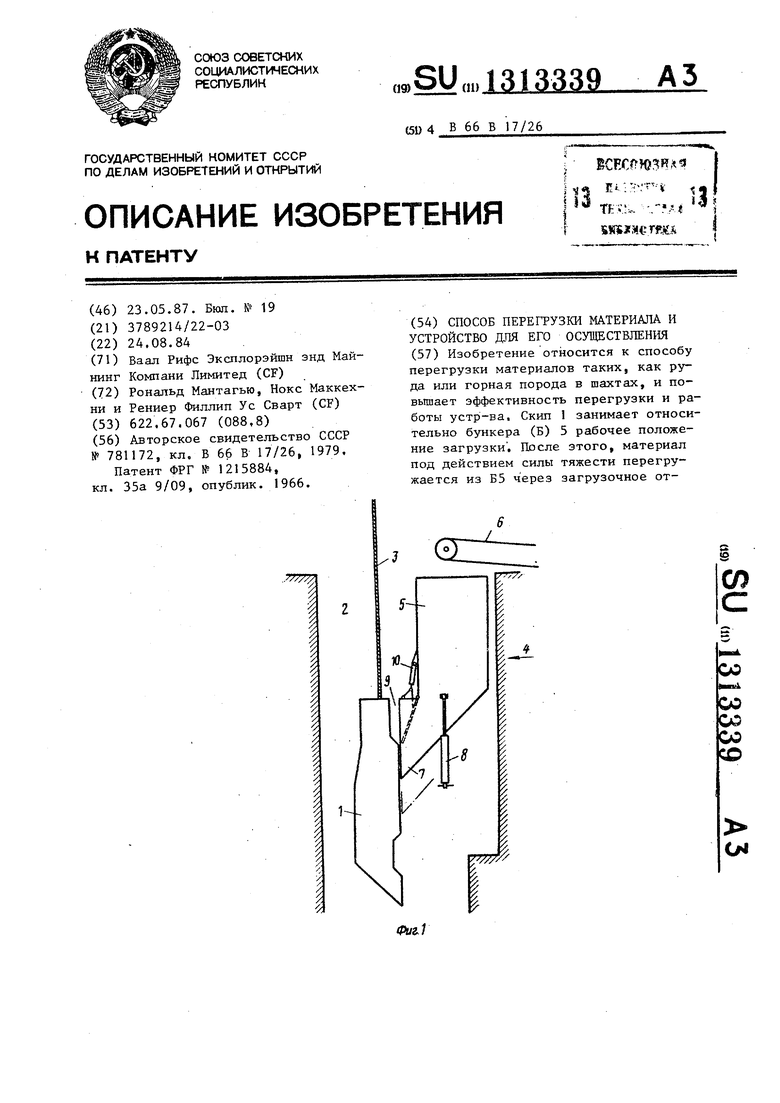
Фиг.
Редактор О.Юрковецкая
Составитель Л.Черепенкина Техред И.Попович
Заказ 1982/58
Тираж 721Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб, , д,4/5
-Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор А.Тяско
| Устройство для загрузки рудничных скиповых подъемников | 1979 |
|
SU781172A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
