2. Перегружатель по п.1, о т - лич ающийся тем, что привод колес имеет пневмодвигатель, а механизм поворота пары колес вьтолнен из шарнирно установленных на П-образной раме стоек нижние концы которых жестко связаны с осяг колес, а верхние - :Имеют подпружиненные рычаги с катками, установленными с воз-можностью контактировайия. с боковыми стенками соединенных между собой вагонеток, причем механизм поворота бункера вьшолнен из телескопических силовых цилиндров и из закреплен, ных на П-образной раме направляницих, при этом бункер имеет ролики, уста-, новленные с возможностью перемещения в направляющих.
39184
3„ Перегружатель по По1, о т л ичающийся тем, что, с целью перемещения перегружателя своим ходом, механизм поворота пары колес снабжен тягой, шарнирно связанной, с рычагами и имеет шарнирно установленный на П-обрАзной раме Г-образный рычаг, одно плечо которого шарнирно связано с шарнирной тягой,
4. Перегружатель по п.1, о т л ичающийся тем, что дно бункера вьшолкено из двух шарнирно связанг ных с торцевыми стенками бункера створок, каждая из которьк связана с П-образной рамой посредством силового цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУНКЕР-ПЕРЕГРУЖАТЕЛЬ | 1973 |
|
SU390296A1 |
| Конвейер-перегружатель | 1979 |
|
SU785522A1 |
| Устройство для обмена вагонеток | 1984 |
|
SU1155019A1 |
| Погрузочно-транспортная машина | 1987 |
|
SU1468078A1 |
| Шахтная вагонетка | 1980 |
|
SU901118A1 |
| Устройство для выгрузки сыпучих материалов | 1989 |
|
SU1775345A1 |
| Погрузочное устройство проходческого щита | 1980 |
|
SU905479A1 |
| Погрузочно-транспортная машина Куля Ю.И. | 1989 |
|
SU1624192A1 |
| Транспортное средство | 1984 |
|
SU1213625A1 |
| Устройство для удержания партии вагонеток в наклонной выработке | 1988 |
|
SU1666763A1 |

1. ПРОХОДЧЕСКИЙ ПЕРЕГРУЖАТЕЛЬ, включакнций раму на колесном ходу с осями и механизм перегрузки материала, отличающийся тем, что, с целью повышения производительности перегрузки материала в шахтные вагонетки, рама выполнена П-образной с возможностью охвата шахтной вагонетки, а колеса имеют механизм поворота и снабжены приводом, при этом механизм перегрузки выполнен из шарнирно установленного в верхней части П-образной рамы бункера с дном и торцевьтми стенками с возможностью его установки в транспортном положении посредством механизма поворота выше шахтной вагонетки. (Л со ;о 00 iu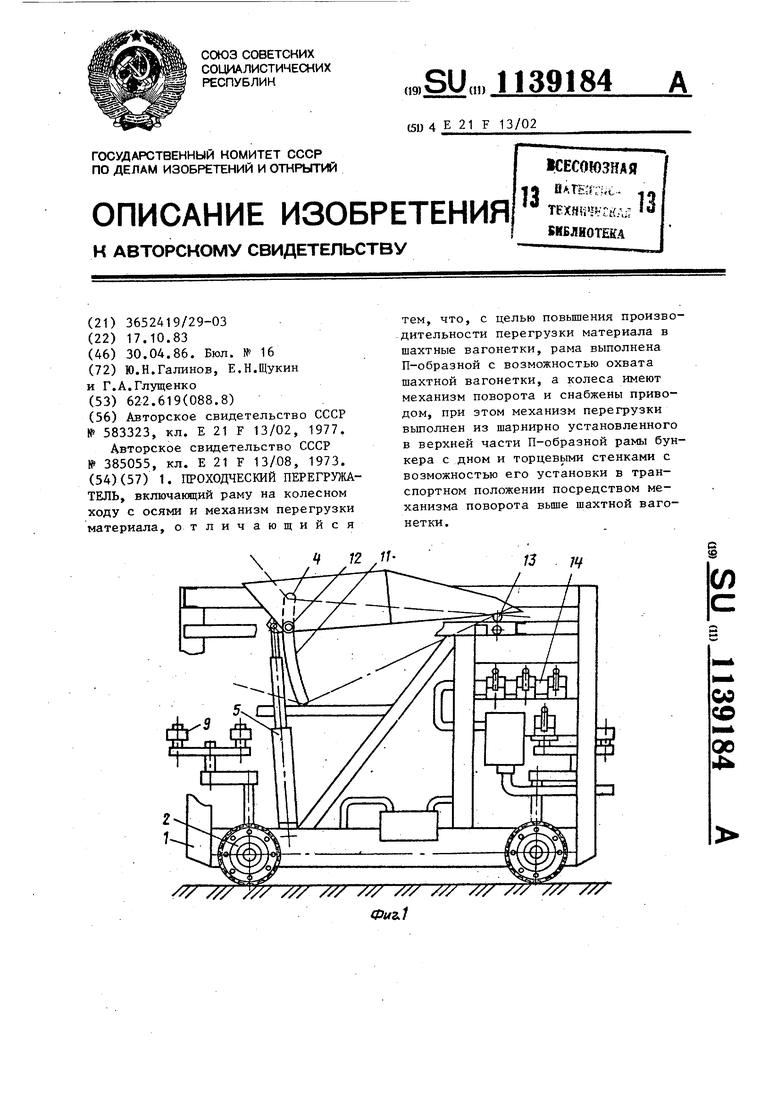
1
Изобретение относится к горной промышленности, а именно к перегруателям, и может быть использовано при проходке горизонтальных горных ыработок.
Известен перегружатель, включаюий саморазгружакяцийся скип с тележой, установленный с возможностью перемещения по направляющим балкам. Наиболее близким по техническому решению является проходческий перегружатель, включающий раму на колесном ходу с осями и механизм перегрузки материала., Общим недостатком известных перегружателей является пониженная эффективность погрузки отбитой горной массы в вагонетки, обусловленная необходимостью монтажа перегружателей перед началом погрузки, их малой мобипьностью и необходимостью наличия дополнительного механизма (агрегата) для замены вагонеток под разгрузочным участком перегружателя. Кроме того, все известные подвижные перегружатели имеют ограниченные возможности передвижения своим ходом по свободной выработке.
Цель изобретения - повышение производительности перегрузки материала в шахтные вагонетки.
Достигается это тем, что в проходческом перегружателе, включающем
раму на колесном ходу с осями и механизм перегрузки, рама вьтолнена П-образной с возможностью охвата шахтной вагонетки, а колеса имеют
механизм поворота и снабжены приводом, при этом механизм перегрузки вьтолнен из шарнирно установленной в верхней части П-образной рамы бункера с дном и торцевыми стенками с
возможностью его установки в транспортном положении посредством механизма поворота шахтной вагонетки, а привод колес имеет пневмодвигатель, причем механизм поворота пары колес выполнен из шарнирно установленньрс на П-образной раме стоек, нижние концы которых жестко связаны с осями колес, а верхние - имеют подпружиненные рычаги с катками, установленньв№ с возможностью контактирования с боковыми стенками соединенных между собой вагонеток, причем механизм поворота бункера выполнен из телескопических гидроцилиндров и из
закрепленных на П-образной раме направляющих, при этом бункер имеет ролики, установленные с возможностью перемещения в направляющих, а механизм поворота пары колес снабжен
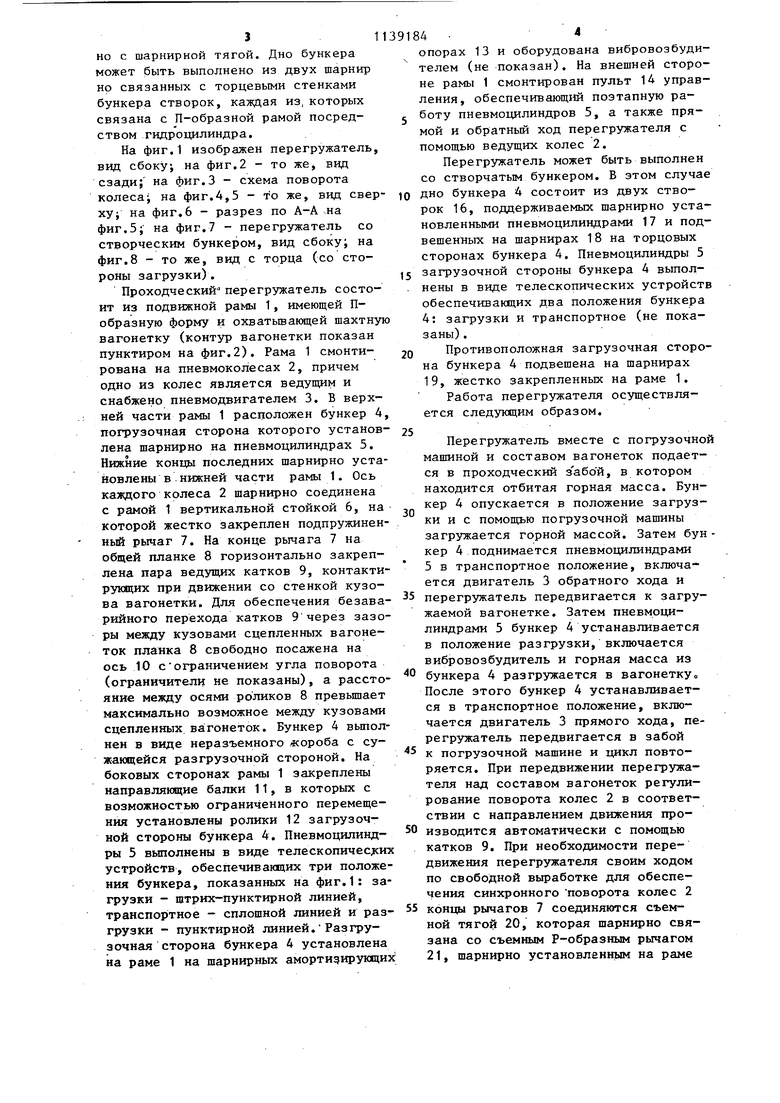
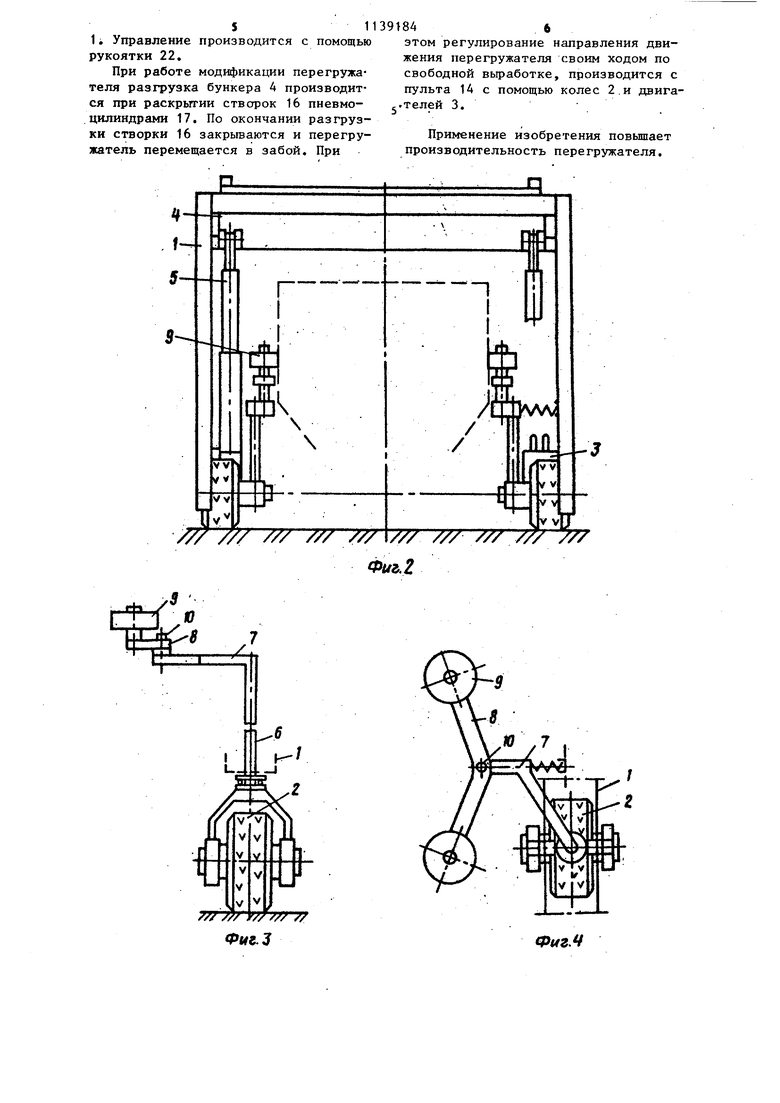
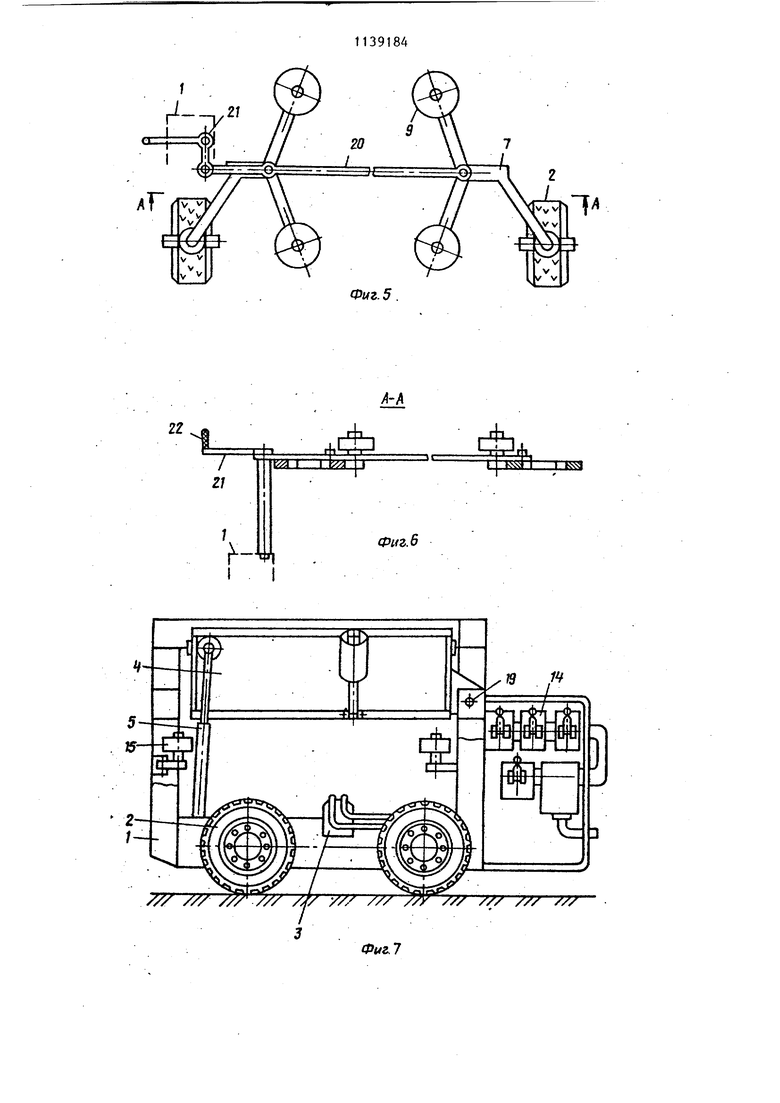
тягой, шарнирио связанной с рычага-. ми и имеет шарнирно установленный на П-образиой раме Г-образный рычаг, одно плечо которого шарнирно связа31но с шарнирной тягой. Дно бункера может быть выполнено из двух шарнир но связанных с торцевыми стенками бункера створок, каждая из, которых связана с П-образной рамой посредством гидрохдалиндра. На фиг.1 изображен перегружатель, вид сбоку; на фиг,2 - то же, вид сзади; на фиг.З - схема поворота колеса; на фиг.4,5 - то же, вид свер ху; на фиг.6 - разрез по А-А на фиг.5; на фиг,7 - перегружатель со створческим бункером, вид сбоку; на фиг.8 - то же, вид с торца (со стороны загрузки). Проходческий перегружатель состоит из подвижной рамы 1, имеющей Побразную форму и охватьтакщей шахтну вагонетку (крнтур вагонетки показан пунктиром на фиг.2). Рама 1 смонтирована на пневмоколесах 2, причем одно из колес является ведущим и снабжено пневмодвигателем 3. В верхней части рамы 1 расположен бункер 4 погрузочная сторона которого установ лена шарнирно на пневмоцилиндрах 5. Нижние концы последних шарнирно уста новлены в нижней части рамы 1. Ось каждого колеса 2 шарнирно соединена с рамой 1 вертикальной стойкой 6, на которой жестко закреплен подпружинен ный рычаг 7, На конце рычага 7 на общей планке 8 горизонтально закреплена пара ведущих катков 9, контакти рующих при движении со стенкой кузова вагонетки. Для обеспечения безава рийного перехода катков 9 через зазо ры между кузовами сцепленных вагонеток планка 8 свободно посажена на ось 10 сограничением угла поворота (ограничители не показаны), а рассто яние между осями роликов 8 превьш1ает максимально возможное между кузовами сцепленных вагонеток. Бункер 4 вьтол нен в виде неразъемного жороба с сужающейся разгрузочной стороной. На боковых сторонах рамы 1 закреплены направляющие балки 11, в которых с возможностью ограниченного перемещения установлены ролики 12 загрузочной стороны бункера 4. Пневмоцилиндры 5 выполнены в виде телескопичесдси устройств, обеспечивающих три положе ния бункера, показанных на фиг.1: за грузки - штрих-пунктирной линией, транспортное - сплошной линией и раз грузки - пунктирной линией.Разгру3очная сторона бункера 4 установлена на раме 1 на шарнирных амортизирующи 4 4 опорах 13 и оборудована вибровоэбудителем (не показан). На внешней стороне рамы 1 смонтирован пульт 14 управления, обеспечивающий поэтапную работу пневмоцилиндров 5, а также прямой и обратный ход перегружателя с помощью ведущих колес 2. Перегружатель может быть выполнен со створчатым бункером. В этом случае дно бункера 4 состоит из двух створок 16, поддерживаемых шарнирно установленными пневмоцилиндрами 17 и подвешенных на шарнирах 18 на торцовых сторонах бункера 4. Пневмоцилиндры 5 загрузочной стороны бункера 4 выполнены в виде телескопических устройств обеспечиваидих два положения бункера 4: загрузки и транспортное (не показаны) . Противоположная загрузочная сторона бункера 4 подвешена на шарнирах 19, жестко закрепленных на раме 1. Работа перегружателя осуществляется следующим образом. Перегружатель вместе с погрузочной машиной и составом вагонеток подается в проходческий забой, в котором находится отбитая горная масса. Бункер 4 опускается в положение загрузки и с помощью погрузочной машины загружается горной массой. Затем бун кер 4 поднимается пневмоцилиндрами 5 в транспортное положение, включается двигатель 3 обратного хода и перегружатель передвигается к загружаемой вагонетке. Затем пневмоцилиндрами 5 бункер 4 устанавливается в положение разгрузки, включается вибровозбудитель и горная масса из бункера 4 разгружается в вагонетку После этого бункер 4 устанавливается в транспортное положение, включается двигатель 3 прямого хода, перегружатель передвигается в забой к погрузочной машине и цикл повторяется. При передвижении перегружателя над составом вагонеток регулирование поворота колес 2 в соответствии с направлением движения производится автоматически с помощью катков 9. При необходимости передвижения перегружателя своим ходом по свободной выработке для обеспечения синхронного поворота колес 2 концы рычагов 7 соединяются съемной тягой 20, которая шарнирно связана со съемным Р-образным рычагом 21, шарнирно установленным на раме
1 Управление производится с помощью рукоятки 22.
При работе модификации перегружателя разгрузка бункера А производится при раскрытии створок 16 пневмоцилиидра ш 17. По окончании разгрузки створки 16 закрьгааются и перегружатель перемещается в забой. При /77/// /// /// /// /// .9
Г// xV/ /7
we.J
этом регулирование нгшравления движения перегружателя своим ходом по свободной выработке, производится с пульта 14 с помощью колес 2.и двига. .телей 3.
Применение изобретения повьшает производительность перегружателя. Фиь2
ФигМ /// ///
Г --1/2
Фиг. 5.
/б
| Перегружатель | 1974 |
|
SU583323A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ПЕРЕГРУЖАТЕЛЬ12 | 0 |
|
SU385055A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
