Изобретение относится к машиностроению и может быть использовано при производстве промышленных роботов и манипуляторов.
Цель изобретения - повышение точности позиционирования путем более полной разгрузки руки робота.
На фиг. I схематически изображено разгрузочное устройство для руки промышленного робота,HMfipt-Цей поворотное звено; на фиг. 2 - разгрузочное устройство для промышленного pb6ofa с по зоротным основанием,. .V
Устройство содержит стойку 1, установленную на основании робота, стрелу 2 с на- правляюпдим элементом, связанную со стойкой 1, и каретку 3 с приводом 4 ее переме- ш.ения, установленную на направляющем элементе стрелы 2. На каретке 3 установлен привод 5 натяжения гибких тяг 6, связанных с конечным звеном 7 робота, несущим схват 8. На руке робота также установлен тензодатчик 9. Кроме того, для руки робота, имеющей поворотное звено 10, установленное на колонне 11, жестко связанной с основанием, стрела 2 снабжена приводом 12 ее поворота, а стойка 1 расположена внутри колонны 11. Позициями 13-15 обозначены приводы перемещения звеньев руки робота.
Устройство работает следующим образом.
После захвата схватом 8 груза на несущее звено руки робота начинает действовать изгибающий момент, который улавливается датчиком деформаций (фиг. 2). По его сигналу привод 5 через гибкие тяги 6 начинает тянуть рабочий орган вверх до тех пор, пока несущее звено полностью не разгружается. Таким образом, механизм
управления положением автоматически разгружен в течение всего времени работы промышленного робота. Привод 5 работает синхронно с приводом несущего звена руки
робота так, что каретка 3 непрерывно находится непосредственно над конечным звеном 7 и усилие разгрузки при этом не оказывает побочного действия на привод несущего звена. При этом поворот руки происходит на основании вместе с устройством разгрузки. Если рука содержит поворотное вокруг вертикальной оси звено 10 (фиг. 1), стрела 2 поворачивается синхронно с эти.м звеном с помощ,ью привода 12 вокруг стойки 1, и по сигналу датчика деформации происходит разгрузка как несущего звена, так и колонны 11 робота.
Формула изобретения
1.Разгрузочное устройство для промыщ- ленного робота, содержащее гибкие тяги, связанные с конечным звено.м руки робота, несущим схват, привод натяжения тяг и тензодатчик, установленный на руке робота, выход которого связан с приводом натяжения, отличающееся те.м, что, с целью повышения точности позиционирования за счет более полной разгрузки, оно снабжено стойкой, установленной на основании робота, стрелой с направляющи.м элементом, связанной со стойкой, и кареткой с приводом ее перемещения, установленной на направляющем элементе стрелы, при этом привод натяжения тяг установлен на этой каретке.
2.-Устройство по п. 1, отличающееся тем, что оно снабжено приводом поворота стрелы,
а стойка расположена внутри колонны робота.
Риг. 2
ВНИИПИ Заказ 2170/18Тираж 954Подписное
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4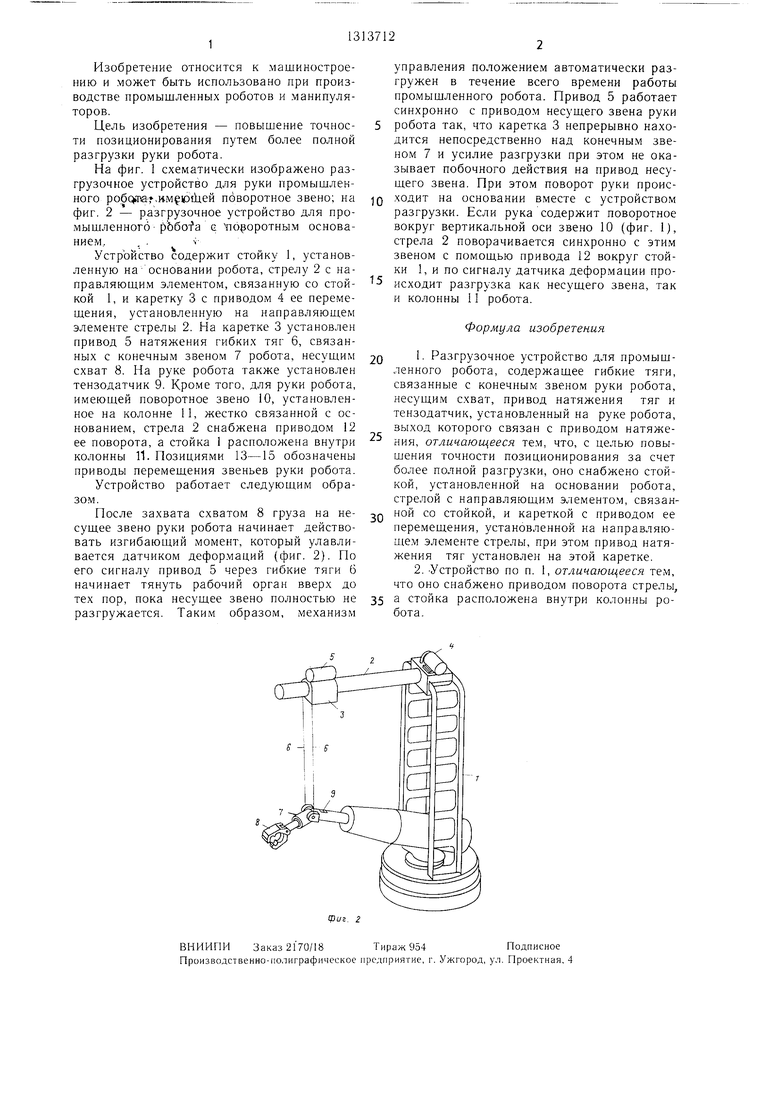
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Промышленный робот | 1986 |
|
SU1344600A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Устройство для разгрузки звена руки робота | 1988 |
|
SU1684035A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Рука манипулятора | 1985 |
|
SU1585142A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
Изобретение относится к машиностроению и может быть использовано при производстве промышленных роботов и .манипуляторов. Целью изобретения является повышение точности позиционирования за счет более полной разгрузки руки. После за.чвата с.хватом 8 робота груза на несушее звено руки начинает действовать изгибающий момент, который улавливается датчиком 9 деформации. По его сигналу привод 5, установленный на каретке 3 разгрузочного устройства, через гибкие тяги 6 начинает тянуть рабочий орган вверх до тех пор, пока несущее звено полностью не разгружается. Привод 5 перемещения каретки работает синхронно с приводом несущего звена, так чтобы каретка 3 находилась непосредственно над конечным звеном 7. 1 з. п. ф-лы, 2 ил. (Л со со ГчЭ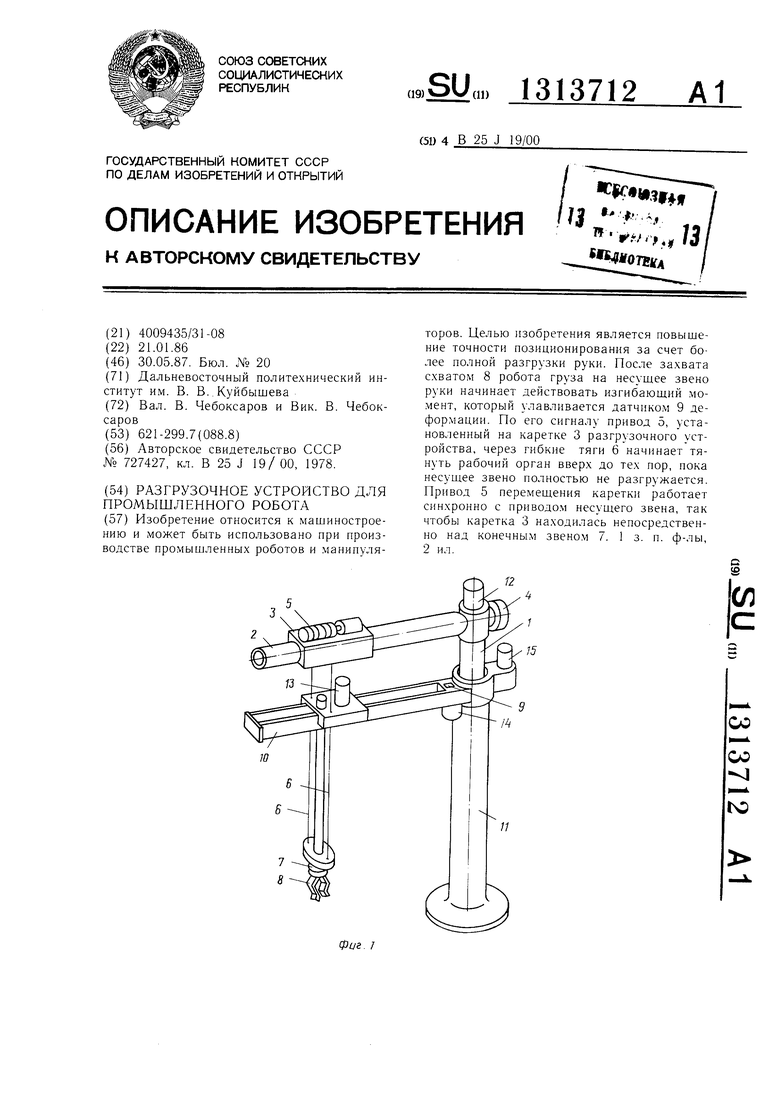
| 1978 |
|
SU727427A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
