Изобретение относится к машиностроению и может быть использовано при производстве промышленных роботов и манипуляторов.
Целью изобретения является повышение точности позиционирования за счет разгру- жения несуш,их элементов робота.
На чертеже изображена кинематическая схема робота.
Промышленный робот содержит установленную на основании прямоугольную раму со сторонами 1--4, три основных каретки 5, 6 и 7 и три дополнительных каретки 8, 9 и 10 с приводом их перемещения, основной мост 11, установленный на каретках 5 и 6, расположенных на противоположных сторонах 1 и 3 рамы, несущий каретку 7 дополнительный мост 12, установленный на каретках 8 и 9, расположенных па сторонах 2 и 4 рамы, и несущий каретку 10. Каретка 7 связана с исполнительным органом 13 и выходом привода 14, установленного на каретке 10.
На основном мосту 1 установлен датчик 15 деформации, выход которого соединен с управляющим в.ходо.м привода 14. Нозициями 16 и 17 обозначены приводы вертикального пере.мещения.
Нривод 14 может быть выно.1нен на основе гидро или ннев.моцилиндра или двигателя любого типа с намоточным ба)а- баном и связан с рабочим органом 13 посредством тросов.
Пром1 ипленный робот работает следующим образом.
После захвата рабочим органом 13 груза на основной мост 1 1 начинает действовать изгибакиций момент, который устанавливается датчиком 15. По сигналу датчика 15 привод 14 через связывающие элементы (тросы) начинает тянуть рабочи;, орган вверх до тех пор, пока основной мост, а вместе г ним и стороны 1 и 3 рамы нолностьк: не разг)узятся. Таким образом позициони|1укпиие элементы конструкции робота автома 1 ичос ки разгружаются в ече
ние всего времени работы промыщленного робота. От веса груза разгружается и привод 16 вертикального перемещения. Приводы дополнительных кареток перемещают их в горизонтальной плоскости синхронно с соот- ветствующими приводами основных кареток, поэтому каретка 10 непрерывно находится непосредственно над рабочим органом 13 и усилие разгрузки не оказывает побочного действия на координатные приводы пере- мещения в горизонтальной плоскости.
Восприятие всех нагрузок осуществляется дополнительным моетом 12 и сторонами 2 и 4, упругие деформации которых при малых углах поворота сечений на концах, которые как правильно не превышают нескольких десятков угловых минут, не могут повлиять на точность пространственного положения сторон 1, 3 рамы и каретки 5.
Формула и:юбретения
Промьмнленный робот, содержащий установленную на основании нрямоугольную раму, гри основных каретки с приводом их перемещения, две из которых расположены на противоположных сторонах рамы, и уста- иов,.ченный на этих каретках основной мост, несущий третью каретку, связанную с исполнительным органом, отличающийся тем, что, с целью повьинения точности позиционировании за счет разгружения несущих элементов, он снабжен датчиком деформации, установленным на основном мосту, приводом с управляющим входом, дополнительным мостом и тремя донолнительны- ми каретками с приводами их перемещения, при этом две из дополнительных ка- регок установлены на свободных сторонах и жестко свящаны с дополнительным MfjcTOM, несущим третью дополнительную каретку, на которой закреплен привод, управляющий вход которого связан с вы- ходом .датчика деформаций, а его выход - с исно.тпптельным органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разгрузочное устройство для промышленного робота | 1986 |
|
SU1313712A1 |
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Устройство для разгрузки звена руки робота | 1988 |
|
SU1684035A1 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| Сборочный робот | 1986 |
|
SU1355477A1 |
| Устройство для переноса заготовок | 1987 |
|
SU1375386A1 |
| КРАН-ШТАБЕЛЕР | 1965 |
|
SU214390A1 |
| Подвесной сортировочный конвейердля шТучНыХ гРузОВ | 1979 |
|
SU804008A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ В ТРЕХ НАПРАВЛЕНИЯХ | 1991 |
|
RU2015102C1 |
Изобретение относится к ма1нинострос- нию и может быть использовано при производстве промышленны.х роботов и манипуляторов. Целью изобретения является повышение точности позиционирования за счет разгружения несущи.х элементов робота, 11осле захвата рабочим органом 13 груза на основной мост 1 I начинает .leiicTBO- FiaTb изгибаюпи1Й момент, и с датчика 15 деформации на унравлянэщий вход привода 14, связанного с кареткой 10, буде поступать сигнал, приводящий к его вклю- че}1ию до обнуления этого сигна,-1а. Эго приводит к разгрузке OCHOBHOIXI моста I и сторон I и 3 рамы po6oia. I ил. а с 12 в о: 4 с: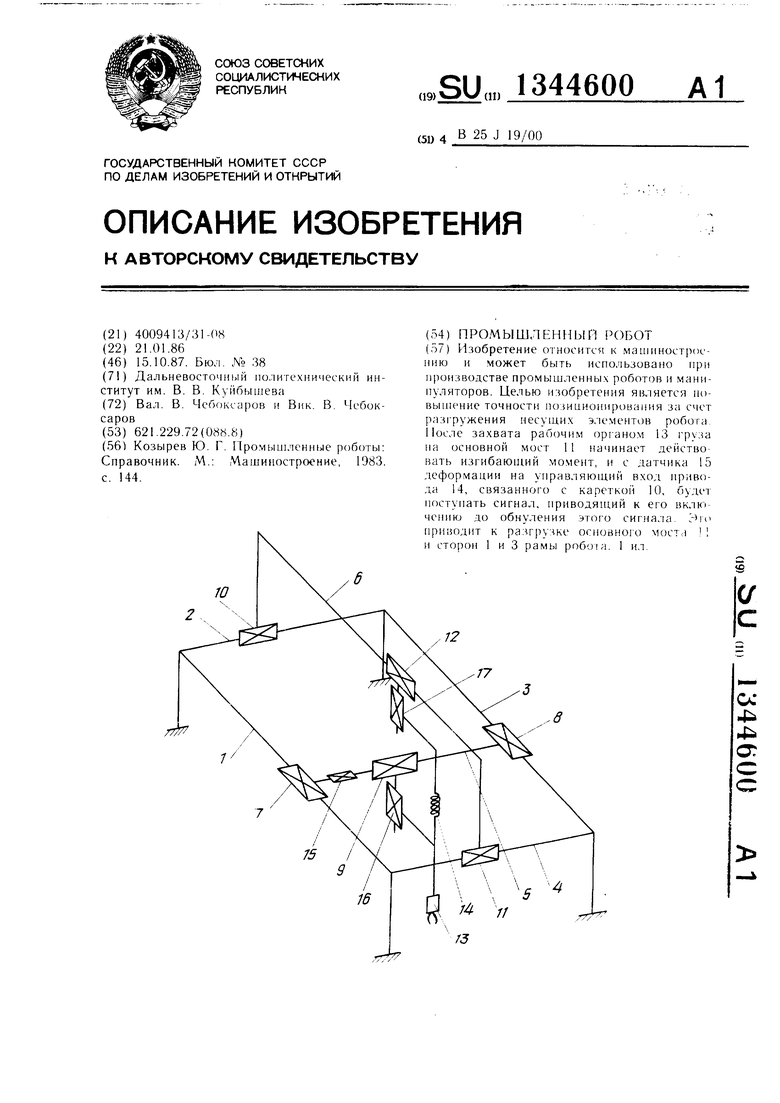
| Козырев Ю | |||
| Г | |||
| ПромЕ,1Н1ленные роботы: Справочник | |||
| М.: Машиностроение, 1983 | |||
| с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
