315
Изобретение относится к машиностроению и может быть использовано при производстве промышленных роботов и манипуляторов.
Целью изобретения является повышение точности позиционирования за счет уменьшения деформации звена в процессе разгрузки и уменьшение массы звена.
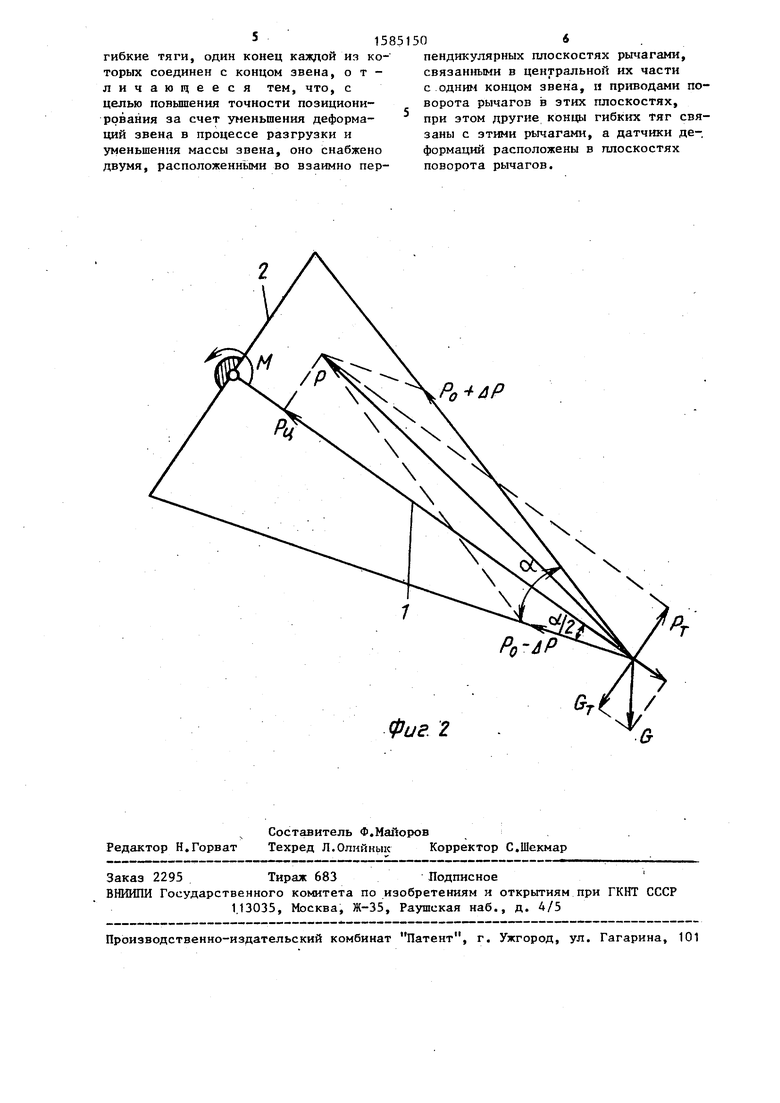
На фиг.1 изображено звено с устройством для его разгрузки, общий вид,; на фиг.2 - схема нагружения звена в одной из плоскостей поворота рычагов.
Устройство, реализующее способ, содержит звено руки робота, выполненное, например, в виде стержня 1, рычаги 2 и 3, которые в своих центральных частях шарнирцо связаны с началом звена и лежат во взаимно перпендикулярных плоскостях, приводы 4 и 5 поворота рычагов в этих плоскостях, гибкие тяги 6-9, соединенные с концами рычагов и концом
звена, узлы 10 - 13 натяжения гибких формации 14 - 17, установленные на стержне 1 симметрично в плоскостях поворота рычагов 2 и 3. Датчики деформаций попарно в указанном порядке включены в два дифференциальных измерительных моста (не показаны), выходы которых через усилители подключены соответственно к приводам 4 и 5, Приводы разгрузки могут быть выполиены, например, на основе неполно- поворотных гидро- или пневмодвигате- лей, малогабаритных электродвигателей с волновыми редукторами или элек- тромагнитов.
Датчики деформаций могут быть, например, тензометрическими.
Угол наклона гибких тяг к оси звена выбирается в пределах 10-40.
При наладке робота с помощью узлов 10-13 натяжения гибких тяг созда ,ют в этих тягах 6-9 одинаковые начальные усилия Р0, величина которых равняется : 2 sin d/2. , где GMttw сумма весов всех последующих звеньев руки робота -и максимальной грузоподъемности робота.
После захвата груза на конец звена начинает действовать усилие G от
35
40
45
50
Формула изобретения
1. Способ разгрузки звена руки робота, при котором измеряют деформацию звена и прикладывают между начат лом и концом звена усилия сжатия, при ращения которых пропорциональны деформации, отличающийся тем, что, с целью повышения точности позиционирования за счет уменьшения деформации звена в процессе разгрузки и уменьшения массы звена, измеряют деформации и прикладывают усилия в двух взаимно перпендикулярных плоскостях, проходящих через ось звена, при этом усилия, действующие в одной плоскости, направляют под равными углами к оси звена, а значения их
веса груза и всех последующих звеньев приращений выбирают равными по велиробота. Составляющая этого усилия, перпендикулярная к оси звена, вызывает появление изгибающего момента на стержне 1. Деформации стержня 1 в
чине и противоположными по знаку.
2. Устройство для разгрузки звена руки робота, содержащее установленные на звене датчики деформаций и
5
0
0
двух перпендикулярных направлениях измеряют датчики Деформаций 14-t7. В дифференциальных измерительных мостах производится попарное вычитание сигналов датчиков, расположенных в одной плоскости, за счет этого сигналы на выходах измерительных мостов пропорциональны изгибающим моментам, действующим в двух перпендикулярных плоскостях, и не зависят от сжатия стержня. Эти сигналы после усиления подаются на приводы разгрузки 4 и 5, к рычагам 2 и 3 прикладываются вращательные моменты относительно стержня 1. В результате в каждой паре гибких тяг 6-9, лежащих в одной плоскости, приращение усилий d P составляет GT : 2 sino(/2, где GT проекция G на плоскость, проходящую через данную пару гибких элементов. Так как гибкие элементы, лежащие в одной плоскости, присоединены к одному рычагу, то приращения усилий в них противоположны по знаку. Векторная сумма усилий Р, действующих в этих гибких элементах, имеет перпендикулярную
, которая
Gr и приложена к концу звена.
оси стержня проекцию равна
Таким образом, звено полностью разгружается от действия изгибающих моментов. Проекция Р на ось стержня Р„ остается постоянной и равной
35
Nome
t.f
0
5
0
Формула изобретения
1. Способ разгрузки звена руки робота, при котором измеряют деформацию звена и прикладывают между начат1 лом и концом звена усилия сжатия, приращения которых пропорциональны деформации, отличающийся тем, что, с целью повышения точности позиционирования за счет уменьшения деформации звена в процессе разгрузки и уменьшения массы звена, измеряют деформации и прикладывают усилия в двух взаимно перпендикулярных плоскостях, проходящих через ось звена, при этом усилия, действующие в одной плоскости, направляют под равными углами к оси звена, а значения их
чине и противоположными по знаку.
2. Устройство для разгрузки звена руки робота, содержащее установленные на звене датчики деформаций и
гибкие тяги, один конец каждой из которых соединен с концом звена, отличающееся тем, что, с целью повышения точности позиционирования за счет уменьшения деформаций звена в процессе разгрузки и уменьшения массы звена, оно снабжено двумя, расположенными во взаимно перпендикулярных плоскостях рычагами, связанными в центральной их части с одним концом звена, и приводами поворота рычагов в этих плоскостях, при этом другие концы гибких тяг связаны с этими рычагами, а датчики деформаций расположены в плоскостях поворота рычагов.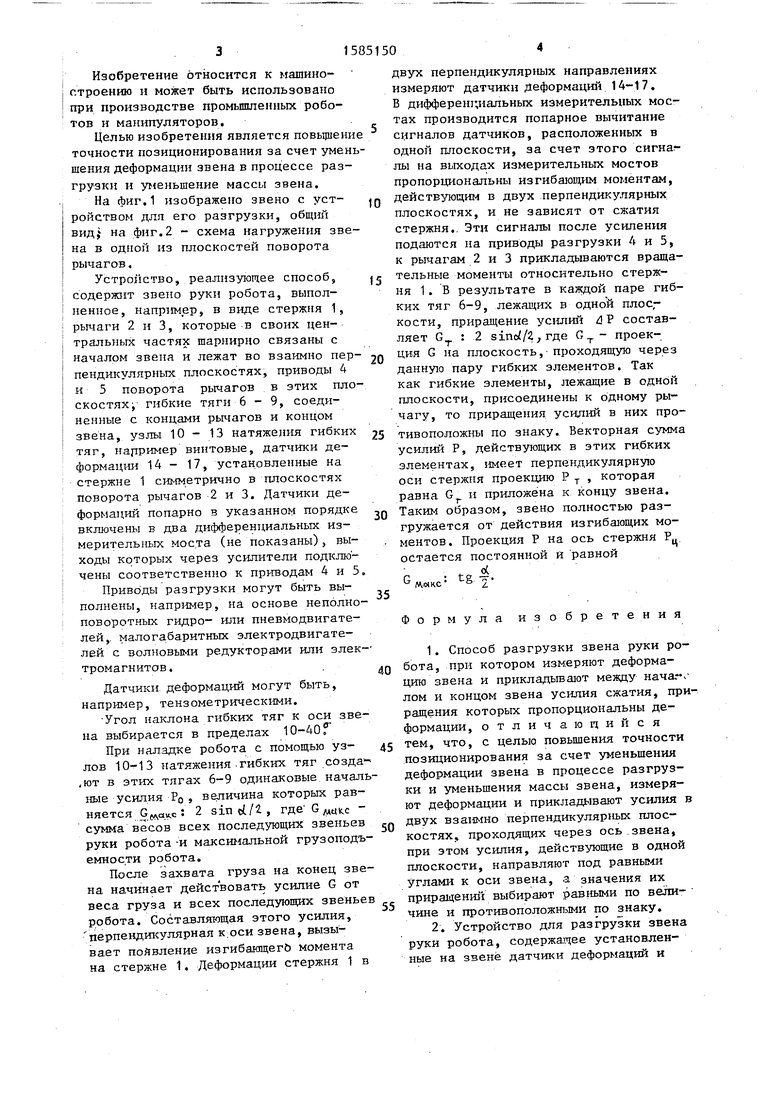
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Устройство для разгрузки звена руки робота | 1988 |
|
SU1684035A1 |
| Разгрузочное устройство для промышленного робота | 1986 |
|
SU1313712A1 |
| Рука манипулятора | 1985 |
|
SU1585142A1 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Промышленный робот | 1986 |
|
SU1344600A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
Изобретение относится к машиностроению и может быть использовано при производстве промышленных роботов и манипуляторов. Целью изобретения является повышение точности позиционирования за счет уменьшения деформации звена в процессе разгрузки и уменьшение его массы. При наладке с помощью узлов 10,11,12 и 13 натягивают гибкие тяги 6,7,8 и 9. Деформации стержня 1 после захвата груза измеряются в двух перпендикулярных плоскостях, проходящих через ось звена, датчиками 14,15,16 и 17. Разгружающие усилия между началом и концом звена прикладывают под углом к оси звена, например, по четырем симметричным направлениям в перпендикулярных плоскостях, проходящих через датчики 14,15,16 и 17 гибких тяг. Приращения усилий создаются приводами 4 и 5 поворота рычагов 2 и 3, которые в центральных точках шарнирно связаны со стержнем 1. При данной конструкции сумма проекций усилий на ось звена поддерживается постоянной. 2 с.п. ф-лы, 2 ил.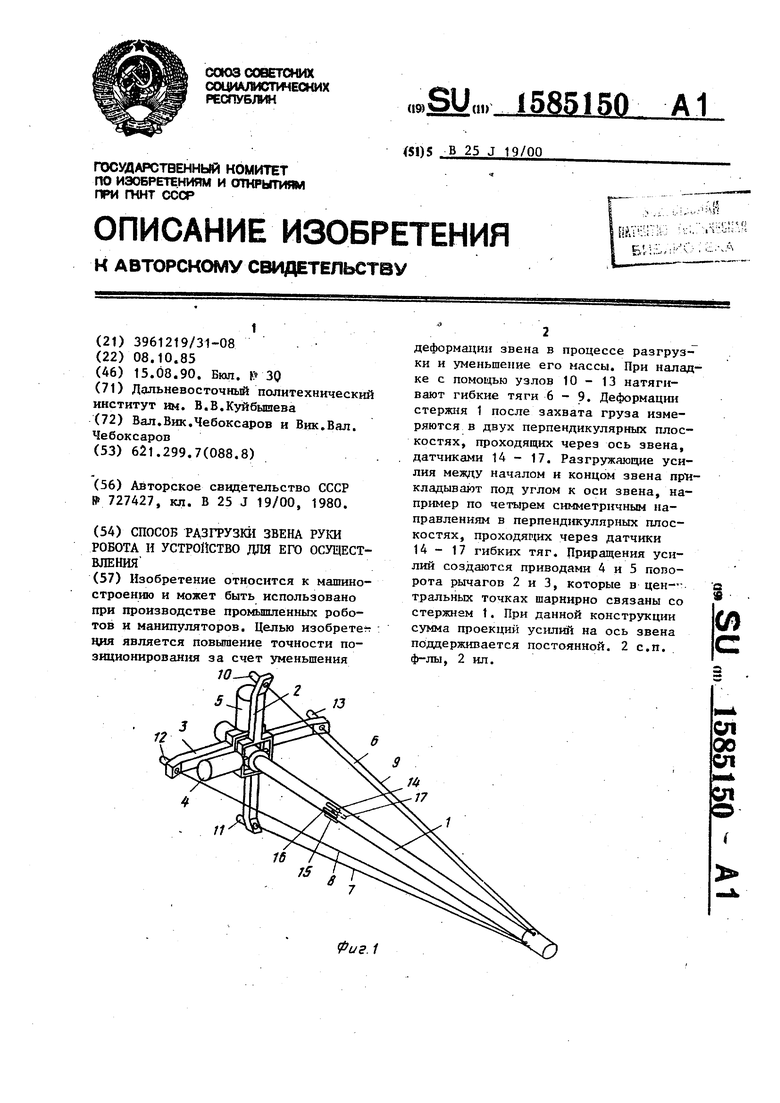
+ АР
Фиг. 2
| 1978 |
|
SU727427A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
