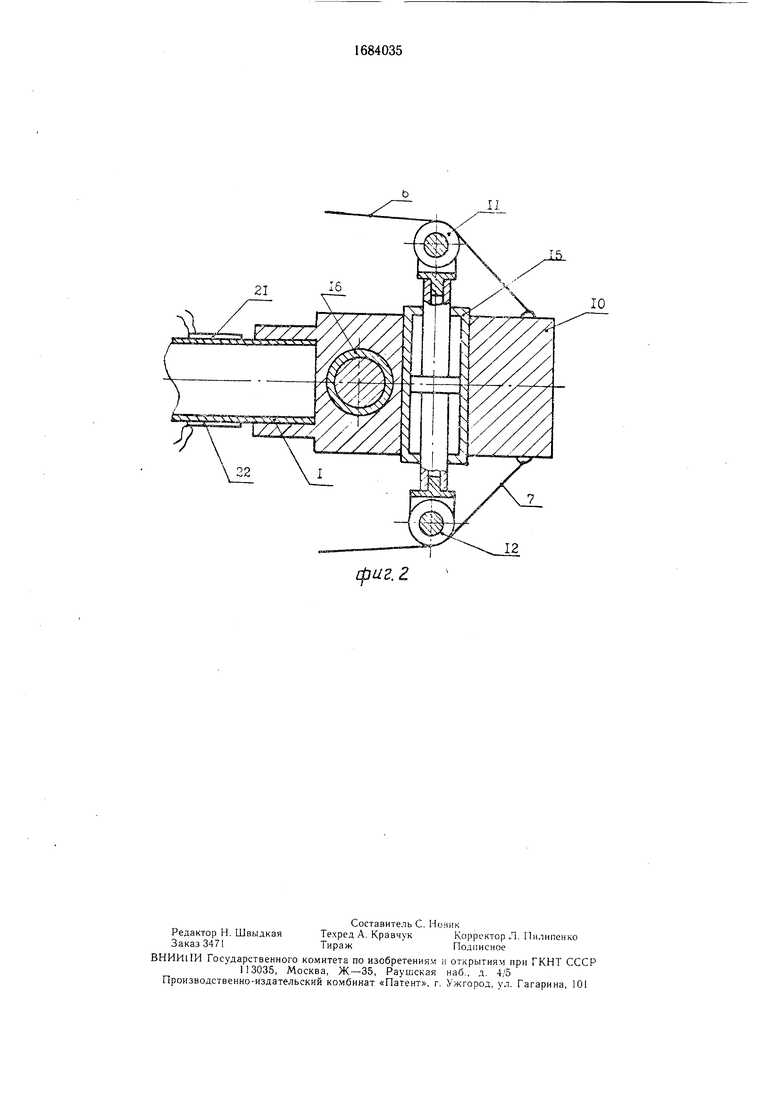
фиг. г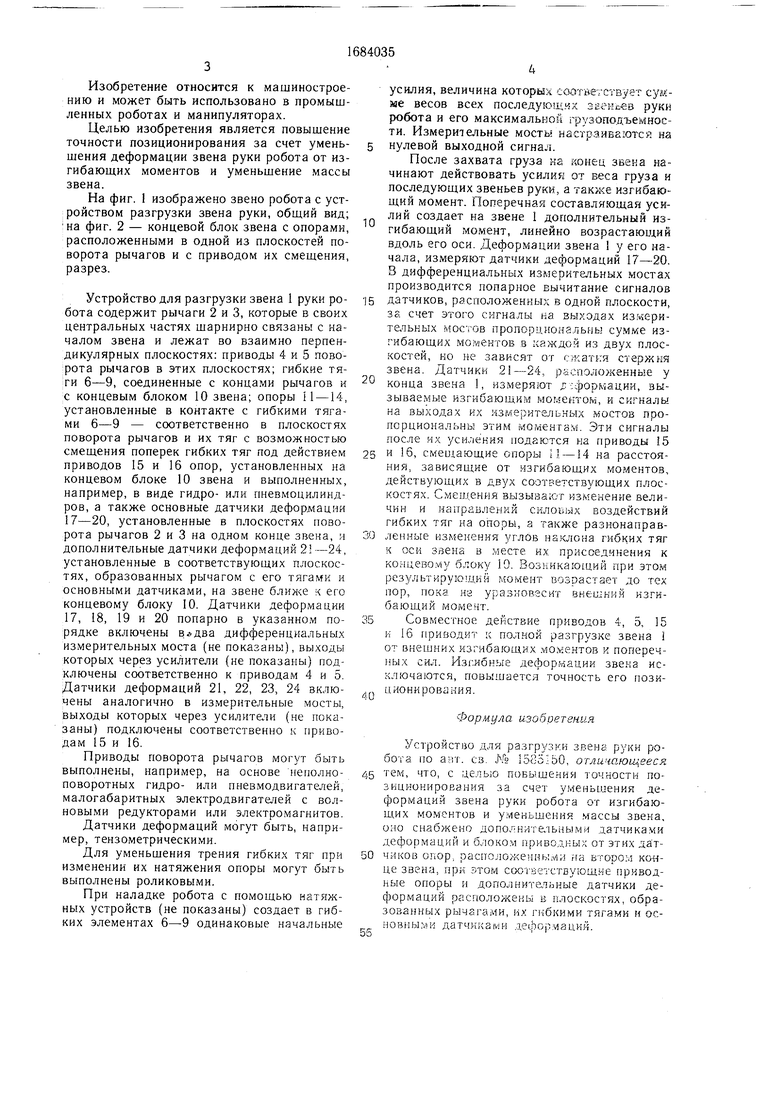
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| Разгрузочное устройство для промышленного робота | 1986 |
|
SU1313712A1 |
| Рука манипулятора | 1985 |
|
SU1585142A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Промышленный робот | 1986 |
|
SU1344600A1 |
| Способ круглого врезного шлифования маложестких фасонных деталей | 1984 |
|
SU1242317A1 |
| Способ компенсации упругих деформаций технологической системы | 1985 |
|
SU1335415A1 |
| ВЕТРОДВИГАТЕЛЬ | 2003 |
|
RU2253038C2 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2018 |
|
RU2691865C1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Цель изобретения - повышение точности позиционирования за счет уменьшения деформаций звена руки робота от изгибающих моментов и уменьшение массы звена. При захвате груза поперечная составляющая усилий- создает на звене 1 изгибающий момент, линейно возрастающий вдоль его оси, и соответствующие изгибающему моменту деформации этого звена. У начала звена 1 они измеряются датчиками 17, 18, 19 и 20, а у конца - датчиками 21, 22, 23 и 24. Сигналы с датчиков после соответствующей обработки подаются соответственно на приводы 4 и 5 поворота рычагов и приводы 15 и 16 опор 11, 12, 13 и 14. За счет перемещения опор изменяется усилие натяжения тяг, что приводит к полной разгрузке звена 1 от внешних изгибающих моментов и поперечных сил. 2 ил. а S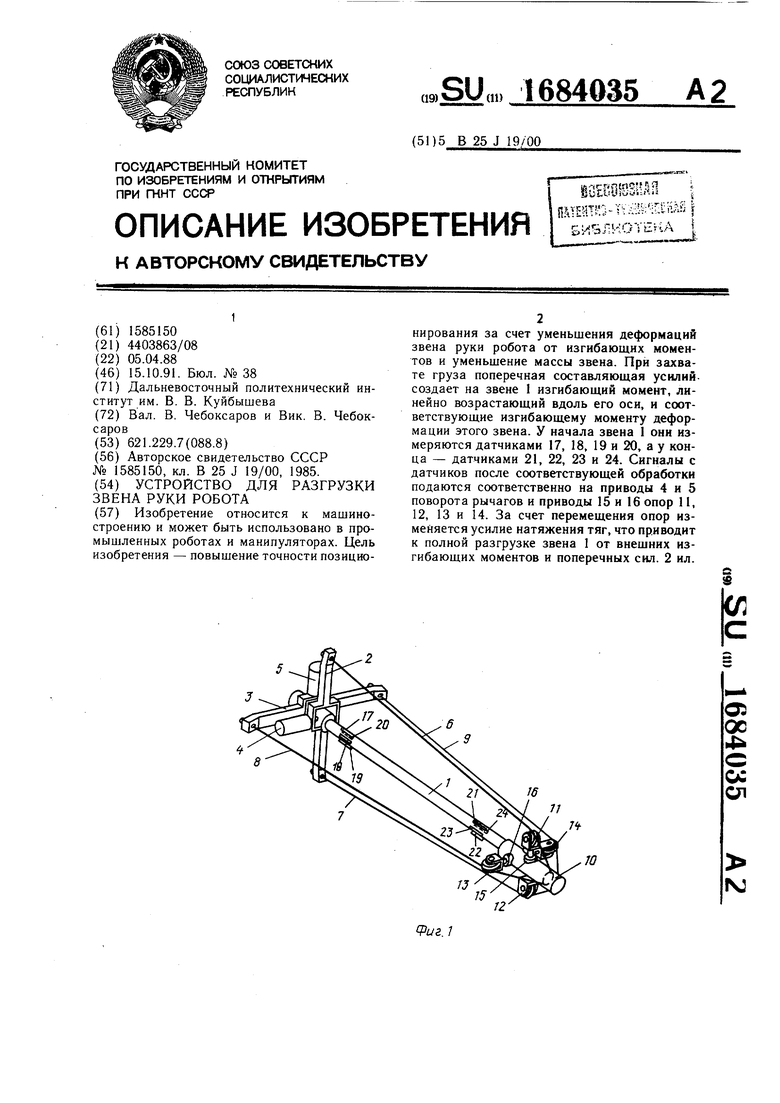
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
