к стационарной жгли прибадаб
лику из блока 10, установленному с возможностью свободного вращения от- носительно смежных звеньев. Угол поворота звена 1 контролируют на противоположном от места приложения крутящего момента конце этого звена датчиком 13. Поворот звеньев 2 и 3 осуществляется аналогично. В результате звенья 1-3 не изгибаются, а выходные сигналы датчиков 13-15 соответствуют фактическим положениям концов этих звеньев. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Разгрузочное устройство для промышленного робота | 1986 |
|
SU1313712A1 |
| Устройство для разгрузки звена руки робота | 1988 |
|
SU1684035A1 |
| Звено-модуль руки манипулятора | 1984 |
|
SU1194668A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| Промышленный робот | 1986 |
|
SU1344600A1 |
| ВЕТРОДВИГАТЕЛЬ | 2003 |
|
RU2253038C2 |
Изобретение относится к станкостроению, в частности к промышленным роботам и манипуляторам. Цель изобретения - повышение точности и позиционирования за счет обеспечения достоверности контроля углов поворота и снижения массы и упругих характеристик звеньев руки манипулятора. Для поворота звена 1 вокруг поперечной к нему оси прикладывают крутящий момент через трос 5 к одному звену, сопряженному с последующим звеном 2. При этом трос 5 прокатывается по ролику из блока 10, установленному с возможностью свободного вращения относительно смежных звеньев. Угол поворота звена 1 контролируют на противоположном от места приложения крутящего момента конце этого звена датчиком 13. Поворот звеньев 2 и 3 осуществляется аналогично. В результате звенья 1, 2, 3 не изгибаются, а выходные сигналы датчиков 13, 14 и 15 соответствуют фактическим положениям концов этих звеньев. 1 ил.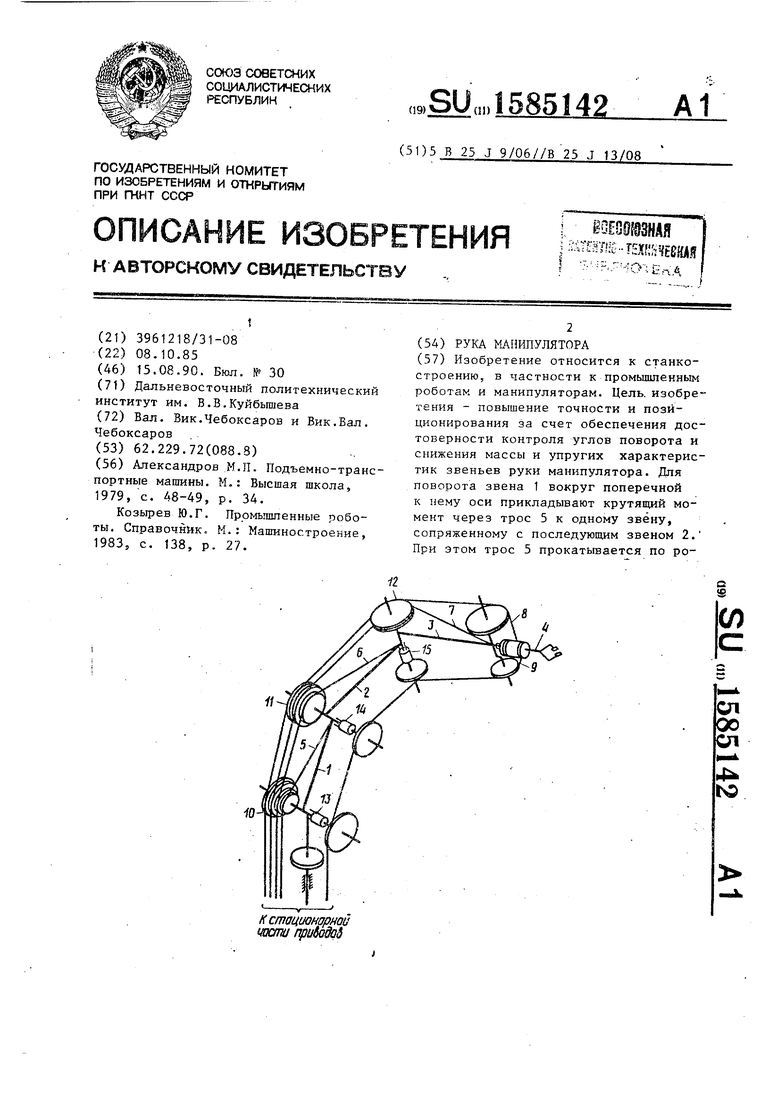
15
20
30
Изобретение относится к станко- строению, в частности к промышленным роботам и манипуляторам, преимущественно, с программным управлением. Целью изобретения является повышение точности позиционирования за счет обеспечения достоверности контроля углов поворота и снижения мас- Ьы И упругих характеристик звеньев руки манипулятора.
На чертеже показана принципиальная кинематическая схема руки манипу- 25 йятора.
Рука манипулятора содержит шарнир- но соединенные звенья 1-3, захватное устройство 4 и приводы поворота звеньев, выполненные в виде стационар- йой части (не показано), установленной на стойке манипулятора, тяговых Элементов 5-7, концы которых соедине ны с осями шарниров соответственно Звеньев 2-4, тяговых элементов 8 и 9, Охватывающих барабан поворота захватного устройства 4 вокруг лродоль- Йой оси, и блоков-10-12 свободно вращающихся роликов, расположенных на Осях шарниров соответственно звеньев 1-3 и огибаемых тяговыми элементами 5-8. Рука также содержит датчики 13- 15 углов поворота звеньев, смонтиро- Ьанные на осях шарниров соответственно звеньев 1-3.
Для поворота звена 1 вокруг оси его шарнира стационарная часть привода выпускает или втягивает тяговый элемент 5, который, прокатываясь nof крайнему свободно вращающемуся роли35
40
45
за ось шарнира звена 2, поэтому изг ба звена 1 не происходит. Контроль угла поворота звена 1 производится чиком 13 угла поворота. Так как зве 1 не изогнуто, то выходной сигнал д чика 13 угла поворота соответствует фактическому положению конца звена 1 - оси шарнира звена 2.
Поворот звеньев 2 и 3 осуществля ется аналогично с помощью соответст венно тяговых элементов 6 и 7, а та же датчиков 14 и 15 углов поворота.
Тяговый элемент 8 поворачивает захватное устройство 4 вокруг продольной оси, а тяговый элемент 9 на гивает кинематическую цепь руки.
Формула изобретени
Рука манипулятора, содержащая ша нирно связанные звенья, приводы их поворота и датчики углов поворота з ньев, смонтированные на осях шарнир отличающаяся тем, что, с целью повышения точности позиционирования за счет обеспечения досто верности контроля углов поворота и снижения массы и упругих характерис тик звеньев, привод каждого звена выполнен в виде блока, свободно рас положенного на оси шарнира, и тягов го элемента, огибающего этот блок, при этом датчик угла поворота звена расположен на оси шарнира, связываю щей это звено с предыдущим, и соосн с блоком, а конец тягового элемента соединен с осью шарнира, связывающ это звено с последующим.
KV из блока 10, поворачивает звено 1
Составитель С.Новик Редактор Н.Горват Техред М.Ходанич Корректор С.Шевкун
Заказ 2294Тираж 701 Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ CCClP 113035, Москва, Ж-35, Раушская наб., д. 4/5
5
0
0
5
5
0
5
за ось шарнира звена 2, поэтому изгиба звена 1 не происходит. Контроль угла поворота звена 1 производится датчиком 13 угла поворота. Так как звено 1 не изогнуто, то выходной сигнал датчика 13 угла поворота соответствует фактическому положению конца звена 1 - оси шарнира звена 2.
Поворот звеньев 2 и 3 осуществляется аналогично с помощью соответственно тяговых элементов 6 и 7, а также датчиков 14 и 15 углов поворота.
Тяговый элемент 8 поворачивает захватное устройство 4 вокруг продольной оси, а тяговый элемент 9 натягивает кинематическую цепь руки.
Формула изобретения
Рука манипулятора, содержащая шар- нирно связанные звенья, приводы их поворота и датчики углов поворота звеньев, смонтированные на осях шарниров, отличающаяся тем, что, с целью повышения точности позиционирования за счет обеспечения достоверности контроля углов поворота и снижения массы и упругих характеристик звеньев, привод каждого звена выполнен в виде блока, свободно расположенного на оси шарнира, и тягового элемента, огибающего этот блок, при этом датчик угла поворота звена расположен на оси шарнира, связывающей это звено с предыдущим, и соосно с блоком, а конец тягового элемента соединен с осью шарнира, связывающей это звено с последующим.
| Александров М.П | |||
| Подъемно-транспортные машины | |||
| М.: Высшая школа, 1979, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
