11313800
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления стреловыми уравновешивающими подъемниками.
Цель изобретения - повышение надежности устройства.
На чертеже изображена функциональная схема nuyjnaragMOro устройства.
Устро1 тааГдля управления стреловым уравноввйтЛа ои м подъемником содержит да,тчр.с,: е йа, под ключ енный к управляюще ту входу 2 повторителя 3, подсоединенного входом 4 источнику 5 сжатого воздуха, выходом 6 через дроссель 7 к атмосфере, а выходом 8 через последовательно соединенные пневмоклапаны 9 и 10 первой пары - к силовому пневмоцилиндру 11 подъемника. Пневмоцилиндр 1 также сообщен с
10
15
При выпадении груза из захвата стрелы требуется быстро снизить дав ление в пневмоцилиндре 1 1 во избежа ние резкого перемещения стрелы. Редукционный клапан 19 настраивают та чтобы давление на его выходе было н меньше разности давлений в пневмоци линдре 11 и на выходе датчика 1 вес При выпадении груза из захвата откр вается клапан 13 и через клапаны 12 и 13 воздух из пневмоцилиндра 11 сбрасывается в атмосферу. При обрыв линии в цепи клапана 19 пневмоклапа 10 блокирует пневмоцилиндр 11 стрел подъемника. Формула изобретени
Ограничитель грузоподъемности кр на-штабелера, имеющего два загрузоч ных конвейера, содержащий -жестко
атмосферой через последовательно сое- -20 закрепленный на металлоконструкции
диненные пневмоклапаны 12 и 13 второй пары. Управляющие входы 14-16 пневмо- клапанов 9,12,13 соединены с датчиком 1. Управляющие входы 17 и 18 пневмо- клапанов 10 и 13 соединены с выходом редукционного клапана 19. Входы клапана 19 и датчика 1 подключены к источнику 5, Управляющий вход 20 пнев- моклапана 13 соединен с цилиндром 11, Предохранительньш клапан 21 подключен к пневмоципиндру 11 или к датчику 1. Дроссель.7 может быть регули- . руемым.
Устройство для управления Стреловым уравновешивающим подъемником работает следующим образом.
При нормальной работе устройства клапа1-1Ы 9 и 10 открыты, а клапан 13 закрыт. Дагление в пневмоцилиндре определяется сигн алом датчика 1 веса. Для относительно медленного сброса давления в пневмоцилиндре при уменьшении сигнала датчика 1 предназначен дроссель 7, что позволяет устанавливать заданную скорость опускания груза. При обрыве линии связи между источником 5 и датчиком 1 пневмоклапаны 9 и 12 закрываются и отсекают пневмоцили.вдр 11 от атмосферы, стрела подъемника останавливается и оператор не может манипулировать стрелой до устранения неисправностей. При обрыве линии связи на выходе датчика 1 устройство работает аналогично.
ВНИИПИ Заказ 2174/22
Произв.-полигр, пр-тие, г. Ужгород, ул. Проектная 4
0
15
При выпадении груза из захвата стрелы требуется быстро снизить давление в пневмоцилиндре 1 1 во избежа- ние резкого перемещения стрелы. Редукционный клапан 19 настраивают так, чтобы давление на его выходе было не меньше разности давлений в пневмоцилиндре 11 и на выходе датчика 1 веса. При выпадении груза из захвата открывается клапан 13 и через клапаны 12 и 13 воздух из пневмоцилиндра 11 сбрасывается в атмосферу. При обрыве- линии в цепи клапана 19 пневмоклапан 10 блокирует пневмоцилиндр 11 стрелы подъемника. Формула изобретения
Ограничитель грузоподъемности кра- на-штабелера, имеющего два загрузочных конвейера, содержащий -жестко
20 закрепленный на металлоконструкции
5
0
5
корпус с установленным в нем связан- ньш с грузовым канатом, огибающим блок подпружиненным ползуном, вертикальна установленный подвижный стержень и связанный с цепью привода, подъема груза чувствительный элемент, от л.и чающий ся тем, что, с целью расширения технологических возможностей путем обеспечения контроля массы каждого контейнера при их одновременной загрузке, он снабжен допол- 1-штельным ползуном и дополнительными чувствительными элементами, при этом - ползуны установлены с возможностью горизонтального перемещения и связаны с соответствующей ветвью грузового каната посредством сектора, установленного на эксцентриковой оси, соединенной с осью соответствующего блока, упомянутый стержень установлен между ползунами и связан с каждым из них посредством пары тяг, а чувствительные элементы представляют собой включенны:е по мостовой схеме,
в диагональ которой включено поляризованное исполнительное реле, потенциометры, резисторы двух из которых соединены параллельно и установлены на корпусе симм:етрично отн осительно
0 стержня, а их подвижные контакты закреплены на последнем, резистор третьего закреплен на одном из ползунов, а его подвижный: контакт - на другом ползуне.
0
Тираж 721
Подписное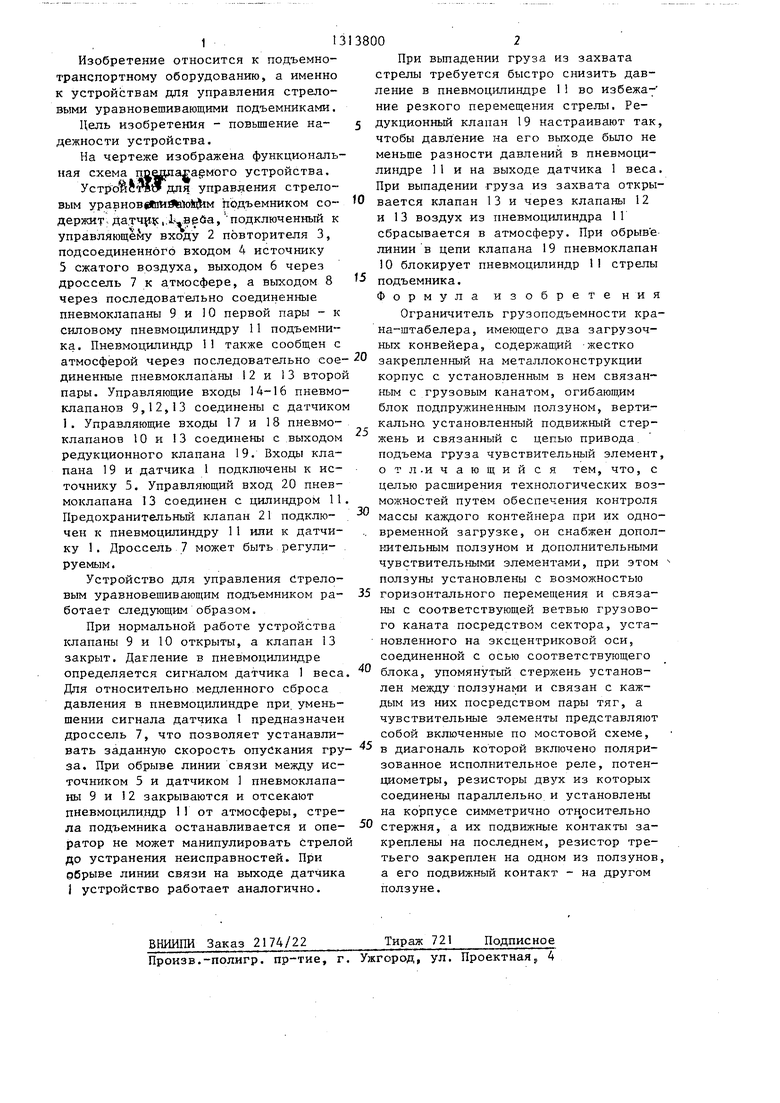
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| СПОСОБ ИСПЫТАНИЯ РЕЖУЩИХ УЗЛОВ ДЕРЕВООБРАБАТЫВАЮЩИХ СТАНКОВ И НАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2077044C1 |
| Система управления уравновешивающим пневматическим подъемником | 1988 |
|
SU1532523A2 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2729623C1 |
| Устройство для управления уравновешенным стреловым подъемником | 1984 |
|
SU1235813A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1983 |
|
SU1177259A1 |
| Источник сейсмических сигналов | 1983 |
|
SU1125566A1 |
Изобретение позволяет исключить запрокидывание стрелы при выпадении груза из захвата, а также блокирует работу стрелы при обрыве в цепи управления. Цель изобретения - повышение надежности. При обрыве цепи датчика 1 веса пневмоцилиндр II отсекается от атмосферы пневмоклапанами 9, 12.При обрыве цепи редукционного клапана 19 пневмоцилиндр II отсекается от атмосферы пневмоклапанами 10, 13.При падении груза из захвата стрелы сброс давления пневмоцилиндра 11 происходит через пневмоклапаны 12, 13. 1 3.п. ф-лы, 1 ил. Q & (Л со со 00
| Ограничитель грузоподъемности крана-штабелера | 1980 |
|
SU931686A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
