1
Изобретение относится к измерительной технике, в частности к области измер ения размеров инструментов, например фрез, на станках с программным управлением,
Целью изобретения является авто- мaтизaIJЗiя процесса измерения разме- ;рсв инструментов и расширения техно- логических возможностей за счет удаления устройства из зоны крепления детали и инструмента в процессе ра- боты,
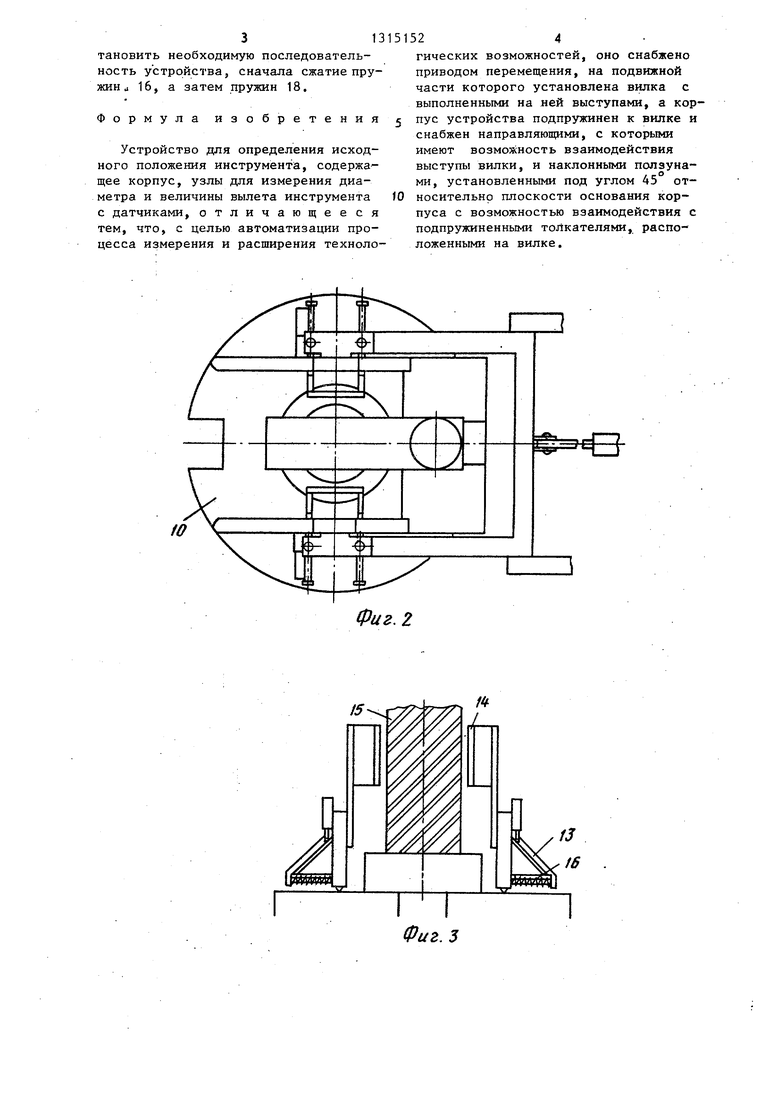
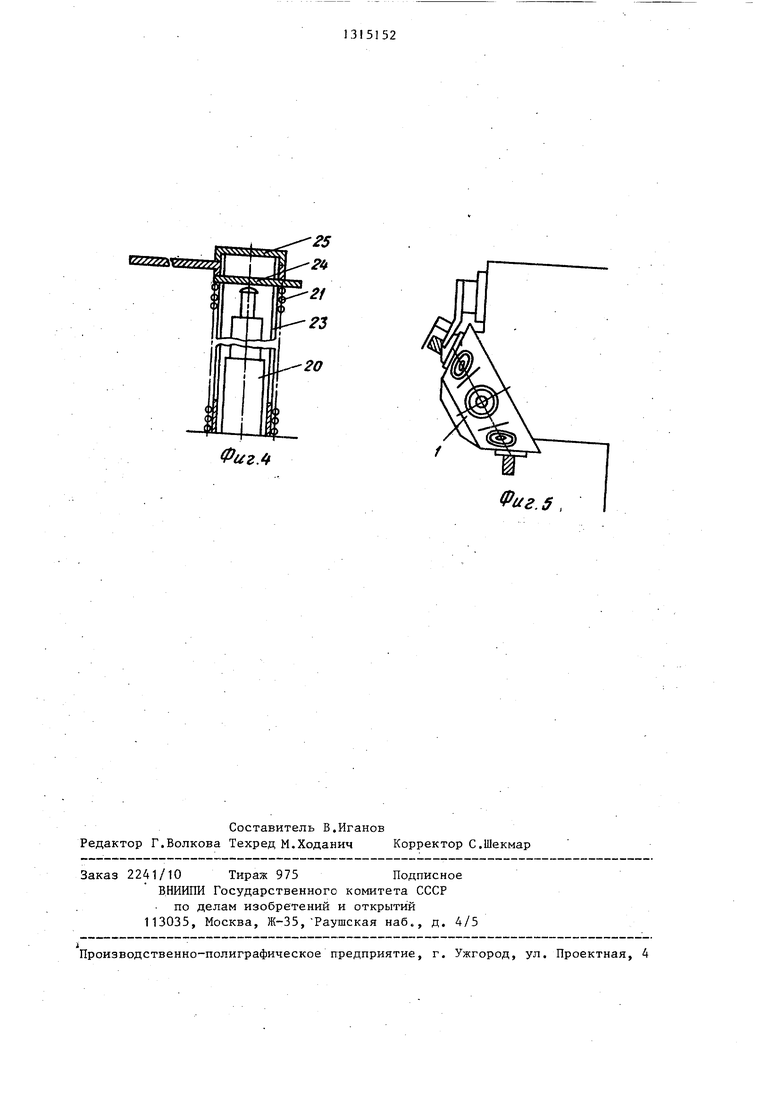
На фиг, 1 представлено предлагаемое устройство-, вид сбоку-, на фиг.2 то же, вид сверху; на фиг. 3 - узел для измерения диаметра инструмента; на фиг. 4 - узел измерения величины вылета инструмента; на фиг. 5 - размещение устройства на станке.
Устройство состоит из корпуса 1, закрепленного перпендикулярно плоскости направляющего цилиндра 2, на котором размещена втулка 3 с контактной пластиной 4, выполненная с возможностыо перемещения вдоль оси ци- линдра.
Вьщвигается устройство в измерительную позицию гидроцилиндром 5, с подвижной частью которого соединена удерживающая корпус 1 вилка 6, вые- тупы 7 которой скользят по направляющим 8. Пружина 9 удерживает устройство относительно вилки 6 в исходном положении и позволяет осуществлять подпружиненный прижим кор- пуса устройства к оправке 10 при вы- :ходе в измерительную позицию.
В боковых выступах 11 корпуса 1 расположены направляющие пазы 12 уз- ла для измерения диаметра инструмента, по которым скользят наклонные ползуны 13, вьщвигающие во время прижима корпуса к оправке контактные пластины -14 навстречу друг другу до контакта с боковой поверхностью инструмента ,15„ Возвратные пружины 16 обеспечивают возврат контактных пластин 14 в начальное положение после измерения, а подпружиненные толка тели- 17 с пружинами 18 предохраняют эти узлы от возможного разрушения пр дости сении контактными пластинами 14 инструмента 15. Датчики 19 хшнейных перемещений фиксируют величину пере- мещения контактных пластин 14 от исходного положения их и до остановки движения при касании инструмента.
52 2
Устройство работает следующим образом.
После фиксирования устройства в измерительной позиции (корпус устройства прижат к оправке) и срабатывании при этом узла для измерения диаметра инструмента подается сигнал на измерение величины вылета инструмента. При этом гидроцилиндр 20, расположенный внутри направляющего цилиндра 2 и находящийся в исходном крайнем верхнем положении, устанавливается в крайнее нижнее положение Под действием силы пружины 21 втулка 3 с контактной пластиной 4 перемещается в направлении корпуса до момента, когда контактная пластина 4 не упрется в торец инструмента 15.
Датчик 22 линейных перемещений при этом фиксирует длину пути,пройденного втулкой от исходного положения и до остановки ее, при касании контактной пластины 4 инструмента 15, причем, зная координаты контактной пластины в исходном положении, можно сразу получить информацию о координате торца инструмента.
Для предотвращения разворота втулки 3 с контактной Цластиной 4 вокруг оси направляющего цилиндра в нем вырезаны пазы 23, через которые проходит перемычка 24, в которую упирается подвижная часть гидроцилиндра 20, устанавливая втулку с .контактными пластинами в исходное положение. 25 служит ограничителем перемещения и регулировки исходного по- узла.
На основании корпуса имеются три выступа 26, упирающиеся в плоскость оправки при установке устройства в измерительную позицию, расположенные в пространстве под углом в 120 .
Угол наклона контактных выступов 27, с которыми контактируют чувствительные элементы датчиков 19 перемещений и размещенных на наклонных ползунах 13, равен 45 . При этом ве- личина контактной пластины 14, а следовательно j. и ползуна в направлении детали равна величине перемещения чувствительного элемента датчика.
Сила пружины 18 в два раза больше сил пружин 16, что позволяет ус313
тановить необходимую последовательность устройства, сначала сжатие пружин 16, а затем пружин 18.
151524
гических возможностей, оно снабжено приводом перемещения, на подвижной части которого установлена вилка с выполненными на ней выступами, а корФормула изобретения пус устройства подпружинен к вилке и
снабжен направляющими, с которыми имеют возможность взаимодействия
Устройство для определения исходного положения инструмента, содержащее корпус, узлы для измерения диаметра и величины вылета инструмента с датчиками, отличающее ся тем, что, с целью автоматизации процесса измерения и расширения техноловыступы вилки, и наклонными ползунами, установленными под углом 45 от- 10 носительнр плоскости основания корпуса с возможностью взаимодействия с подпружиненными толкателями, расположенными на вилке,
выступы вилки, и наклонными ползунами, установленными под углом 45 от- носительнр плоскости основания корпуса с возможностью взаимодействия с подпружиненными толкателями, расположенными на вилке,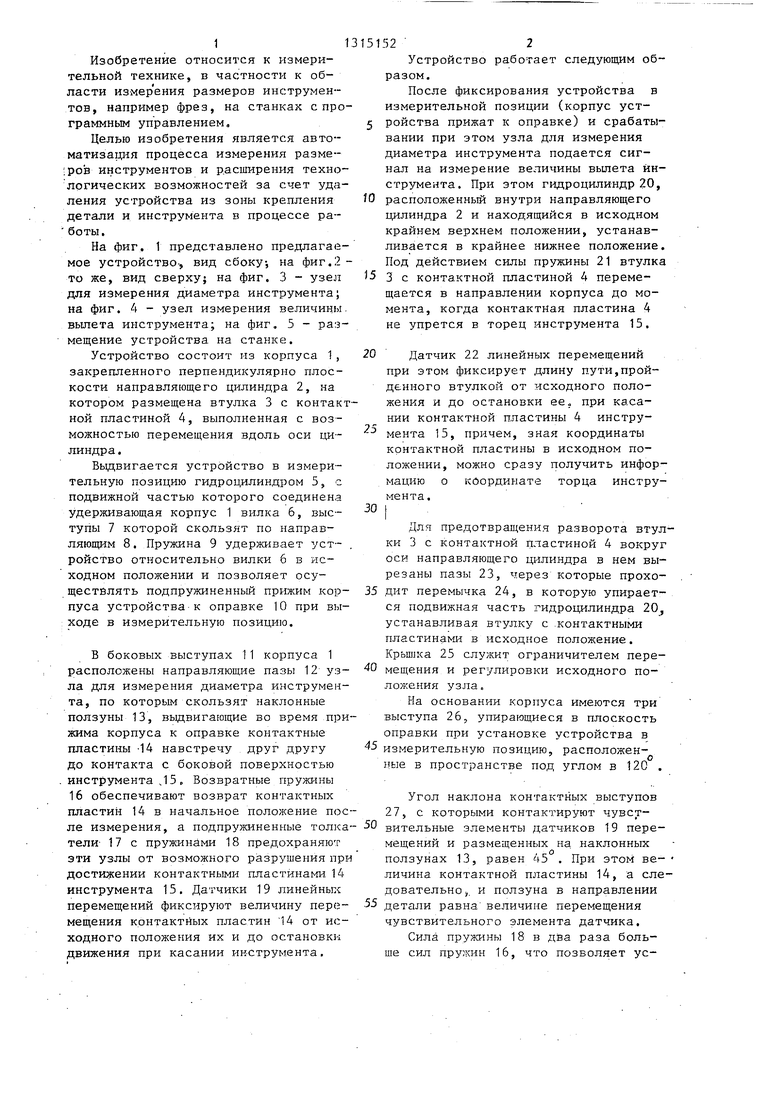
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения инструментов | 1986 |
|
SU1404184A1 |
| Диагностическое устройство для испытания фрезерного станка с программным управлением | 1986 |
|
SU1328086A2 |
| Диагностическое устройство для испытания фрезерного станка с программным управлением | 1985 |
|
SU1247241A1 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| Устройство для регулирования межэлектродного зазора | 1980 |
|
SU973281A1 |
| АВТОМАТ ДЛЯ РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ | 1973 |
|
SU390601A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Шпиндельный узел | 1986 |
|
SU1743719A1 |
| Устройство для контактной точечной сварки | 1984 |
|
SU1211011A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
Изобретение относится к измерительной технике, в частности к области измерения размеров инструментов, например фрез на станках с программным управлением. Целью изобретения является автоматизация процесса измерения размеров инструмента и расширение технологических возможностей за счет удаления устройства из зоны крепления детали и инструмента в процессе работы. Устройство вьщвигается в позицию измерения при помощи гидроцилиндра 5, с подвижной частью которого соединена вилка 6, выступы 7 которой скользят по направляющим 8 корпуса 1. В процессе выхода устройства в измерительную позицию корпус прижимается пружиной 9 к оправке 10. Узел для измерения диаметра инструмента содержит ползуны 13, выполненные наклонно и несущие контактные пластины 14, контактирующие с боковой поверхностью инструмента. Возврат пластин 14 осуществляется пружиной. Выпет инструмента измеряе,т- ся датчиком при касании контактной пластины 4 инструмента 15. 5 ил. (/) /5 13 // Фиг.1
fPu2.2
Фиг. 5
СУу у уУД
Фиг.ft
Фиг.5.
| Устройство для определения исходного положения инструмента | 1981 |
|
SU998003A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
