1
Изобретение относится к машине- строерию и может быть использовано для сборки шестерни привода стартера со штифтами и сухарями.
Цель изобретения - повышение производительности за счет одновременного захвата, транспортировки и сборки всего комплекта устанавливаемых деталей.
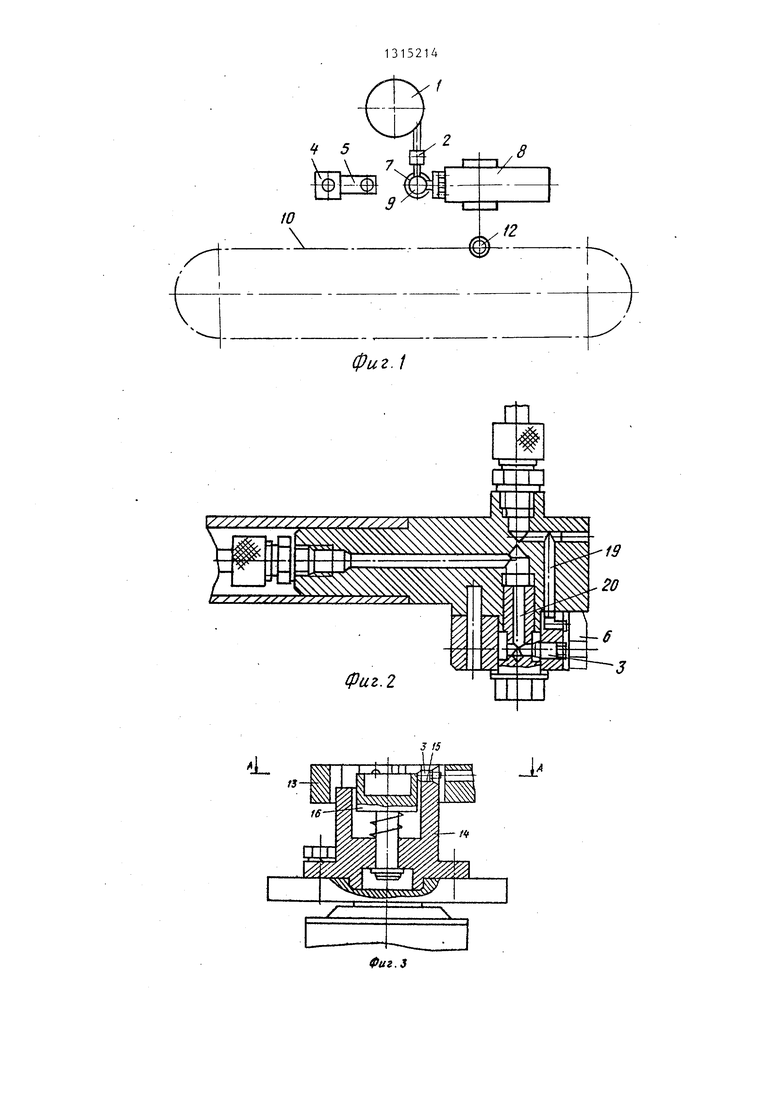
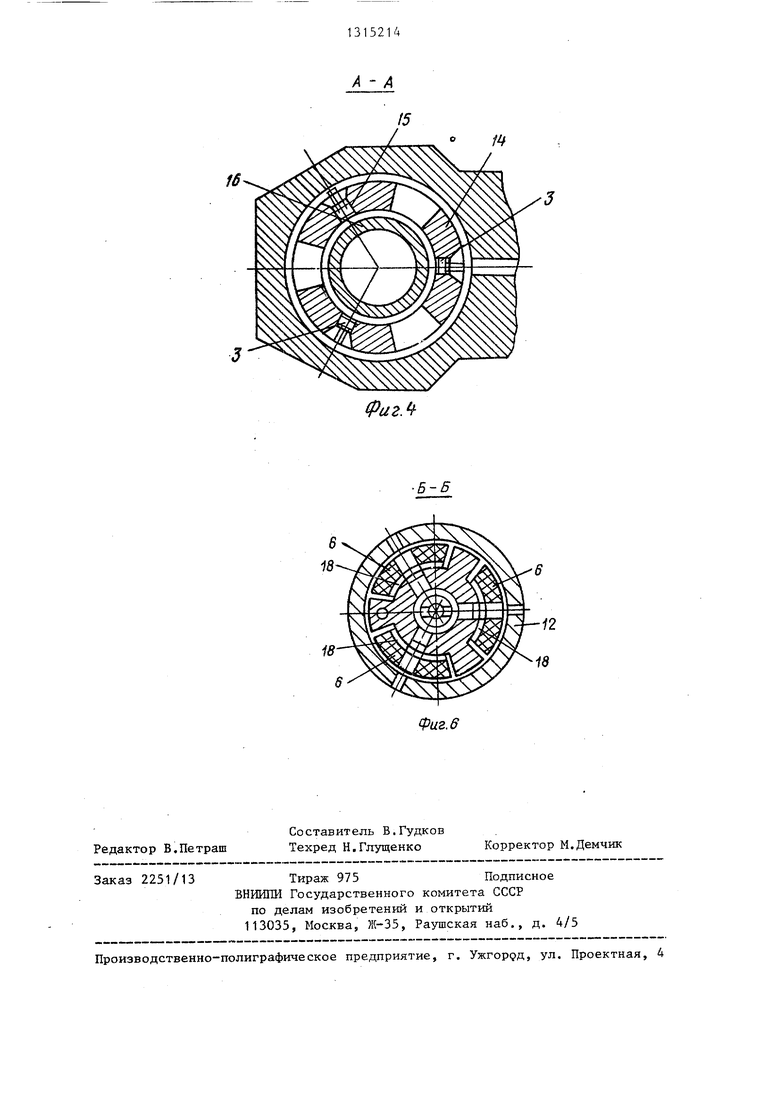
На фиг, 1 изображен робототехнологический комплекс, вид сверху; на фиг. 2 - захватная головка робот на фиг. 3 - поворотньй накопитель; на фиг. 4 - сечение А-А на фиг, 3; на фиг. 5 - захватная головка робота в момент установки штифтов и сухарей .в щестерню привода стартера; на фиг. 6 - сечение Б-Б на фиг. 5.
Робототехнологический комплекс состоит из механизмов подачи 1 и ориентации 2 штифтов 3, магазина 4 механизмом 5 вьщачи сухарей 6, поворотного накопителя 7, промышленного робота 8.с захватной головкой 9, транспортера-накопителя 10 с приспособлениями 11 для установки шестерен 12.
Поворотньй накопитель 7 состоит из неподвижного корпуса 13, обоймы 14, установленной с возможностью поворота относительно корпуса 13 и снабженной сквозными радиальными каналами 15 под штифты 3, и упора 16, подпружиненного относительно обоймы 14.
Захватная головка 9 снабжена ответными каналами 17 и ложементами 18, выполненными в соответствии с конфигурацией сухарей 6 к соединенными магистралями 19 и 20 с источником сжатого воздуха и вакуума (не показано).
Робототехнологический комплекс рботает следующим образом.
Штифты 3 из механизма 1 подачи и механизма 2 ориентации подаются по одному в радиальные каналы 15 накопителя 7 до касания с упором 16, Для набора полного комплекта штифтов 3 обойма 14 поворачивается относительно корпуса 13 на заданньй угол.
После окончания зтой операции: робот 8 подает захватную головку 9 к Накопителю 7, утапливая при этом подпружиненный упор 16. Каналы 17
142
захватной головки устанавливаются соосно с каналами 15 накопителя 7, а магистраль 20 соединяют с источником вакуума, благодаря чему штифты
3 перемещаются в каналы 17 захватной головки 9.
Захватная головка 9 со штифтами перемещается роботом 8 к магазину 4, Предварительно ориентированные
сухари 6 благодаря соединению магистрали 19 с источником вакуума устанавливаются в ложементы 18 захватной головки 9, которая с пол- Н1з1м комплектом деталей устанавливается в отверстие собираемой шестерни 12, поданной транспортером-накопителем 10 в зону сборки.
Установка всех деталей осуществляется путем подключения магистралей 19 и 20 к источнику сжатого
воздуха. Сухари 6 прижимаются к стенкам отверстия в шестерне 12, а штифты 3, пройдя через отверстия в сухарях 6, также устанавливаются в гнезда шестерни 12,
Сборка шестерни привода стартера окончена.
30
35
40
45
50
55
Формула изобретения
Робототехнологический комплекс, содержащий автоматические транспортное и загрузочные устройства, поворотный накопитель с гнездами под устанавливаемые детали и промышлен- ньй робот с захватной головкой , о т- личающийся тем, что, с целью повьш1ения производительности, накопитель снабжен коаксиально рас- пололсенным относительно его оси поворота подвижным упором, а захватная головка - ложементами под устанавливаемые детали, в задних стенках которых выполнены радиальные каналы кроме того,, гнезда в поворотном накопителе выполнены в виде сквозных радиальных всаналов, число и форма которых соответствуют числу и форме радиальных каналов в захватной головке, причем указанная головка имеет возможность взаимодействия с упором накопителя, а все ложементы и радиальные каналь:: в ней соединены соответствующими независимыми пневматическими магистралями с вакуум- но-нагнетательным устройством.
фиг.1
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки тарелок и сухарей с клапанами ДВС | 1990 |
|
SU1761432A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1495055A1 |
| Робототехнологический комплекс | 1984 |
|
SU1202862A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Способ извлечения деталей из кассеты и устройство для его осуществления | 1989 |
|
SU1773680A1 |
| Робототехнологический комплекс | 1988 |
|
SU1590371A1 |
| КОМПЛЕКС СБОРКИ ШАТУННО-ПОРШНЕВОЙ ГРУППЫ | 2013 |
|
RU2548843C2 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
Изобретение относится к машина- строению и позволяет осуществлять одновременно захват, транспортировку и установку всего комплекта собираемых деталей в базовую деталь, что обеспечивает повьшение производительности. После заполнения каналов поворотного накопителя комплектом штифтов 3 захватная головка 9 робота устанавливается так, что бы ее каналы 17были соосны каналам накопителя. Затем магистраль 20 соединяется с источником вакуума, благодаря чему штифты 3 перемещаются в каналы 17. Далее головка 9 подается к загрузочному устройству для комплекта сухарей 6, которые размещаются в ложементах 18головки 9 благодаря соединению магистрали 19 с источником вакуума. После этого головка 9 переносит полный комплект собираемых деталей на сборочную позицию, где устанавливает его в отверстие базовой детали - шестерни 12. Установка всех деталей осуществляется подключением магистралей 19 и 20 к источнику сжатого воздуха. В результате штифты 3 проходят сквозь отверстия в сухарях 6 и попадают 2 гнезда шестерни 12.6 ил. & «4.,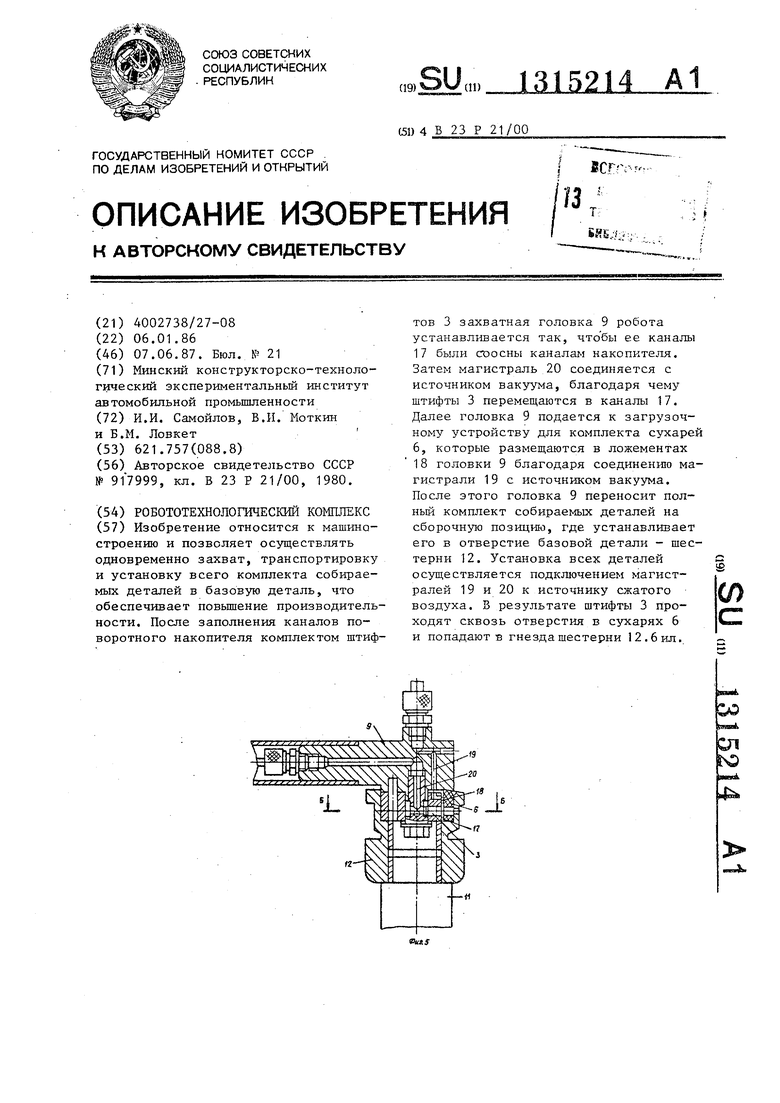
/ -А
Фиг.
IB
Редактор В.Петраш
Составитель В.Гудков Техред Н.Глущенко
Заказ 2251/13
Тираж 975Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 6
Корректор М.Демчик
| Автоматическая линия для сборки шлангов | 1980 |
|
SU917999A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
