/f/J
//
а «
(Л
со ел о ел ел
tft/e.J
21. Для повышения точности позиционирования каретки 2 устройство снабжено механизмом установочного перемещения каретки, выполненным в виде штока 13 силового м линдра 1А, установленного соосно внутри втулки 3 с возможностью поступательного перемещения относительно последней и взаимодействия с ней посредством двух щтифтов 17 и 18 и двух ответных, пазов. Каретка 2 имеет возможность жесткой связи с втулкой 3 через дополнительный фиксируюощй механизм, выполненный в виде шариков 11 и 12, размещенньгх в канавках 9 и 10 втулки
3 и запирающих каретку 2 в крайних положениях. Каретка 2 имеет та1сже связь с приводом 21 посредством осевой компенсирующей муфты А. 1Мток 14 подпружинен относительно втулки 3, а захватный орган 7 закреплен на последней. Втулка 3 установлена с возможностью поворота относительно продольной оси посредством связи с приводом поворота 23. Устройство содержит также механизм фиксации изделия, выполненный в виде сухарей, входящих в пазы кассеты 38 в результате их связи через двухступенчатую реечную передачу. 1 з.п. ф-лы, А ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Автомат для сборки трубного пакета радиатора | 1981 |
|
SU996162A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
| Автоматическая линия сборки роторов электрических машин | 1990 |
|
SU1830594A1 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1956 |
|
SU115325A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |

Изобретение относится к машиностроению и может использоваться для загрузки и выгрузки магазинов - накопителей технологических комплексов. Цель изобретения - повышение точности позиционирования. Устройство содержит каретку 2 для перемещения кассет 38. Каретка 2 установлена на втулке 3 с возможностью поступательного перемещения от привода 21. Для повышения точности позиционирования каретки 2 устройство снабжено механизмом установочного перемещения каретки, выполненным в виде штока 13 силового цилиндра 14, установленного соосно внутри втулки 3 с возможностью поступательного перемещения относительно последней и взаимодействия с ней посредством двух штифтов 17, 18 и двух ответных пазов. Каретка 2 имеет возможность жесткой связи с втулкой 3 через дополнительный фиксирующий механизм, выполненный в виде шариков 11 и 12, размещенных в канавках 9 и 10 втулки 3 и запирающих каретку 2 в крайних положениях. Каретка 2 имеет также связь с приводом 21 посредством осевой компенсирующей муфты 4. Шток 14 подпружинен относительно втулки 3, а захватный орган 7 закреплен на последней. Втулка 3 установлена с возможностью поворота относительно продольной оси посредством связи с приводом поворота 23. Устройство содержит также механизм фиксации изделия, выполненный в виде сухарей, входящих в пазы кассеты 38 в результате их связи через двухступенчатую реечную передачу. 1 з.п. ф-лы, 4 ил.
Изобретение относится к машиностроению и может использоваться для загрузки и выгрузки магазинов-накопителей технологических ко тлексов в составе ГПС.
Цель изобретения - повышение точности пози1у1онирования за счет обеспечения уст ановочного перемещения каретки.
На фиг1. изображено устройство, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2 на фиг.4 - схема технологического комплекса, в состав которого входит устройство.
Устройство содержит корпус 1 с механизмом установочного перемегцения каретки 2. Указанный механизм выполнен в виде установленной вдоль корпуса 1 Г- возможностью поворота относи- тельно продольной оси втулки 3 с раз- мещеньыми на ней с возможностью продольного перемещения кареткой 2 и осевой компенсирующей муфты 4, причем торцовые поверхности 5 и 6 соответственно каретки и ryфты установлены с заданным зазором одна от другой в осевом направлении. На втулке 3 закреплен захватный орган 7, размещенный в гнезде 8 каретки 2. Во втулке 3 выполнены радиальные канавки 9 и 10 под фиксирующий механизм, выполненньп в виде двух шариковых фиксаторов 11 и 12 каретки 2.
Во втулке 3 центрально расположен с возможностью поступательного перемещения шток 13, соединенный с силовым цилиндром 14. Указанный шток содержит два кольцевых выступа 15 и 16,
5
0
5
0 5
0
5
выполненные с возможностью взаимодействия с шариковыми фиксаторами 11 и 12 каретки 2, а также два штифта 17 и 18. Штифт 17 подпружинен в осевом направлении пружиной 19 относительно штока 13 и закреплен во втулке 3 с возможностью взаимодействия с продольным пазом, выполненным в штоке 13, а штифт 18 закреплен в штоке 13 с возможностью взаимодействия с продольным пазом 20, выполненным во втулке 3. Длина паза 20 определяется величиной зазора между торцовыми поверхностями 5 и 6 каретки 2 и муфты 4.
Привод каретки выполнен в виде замкнутой в вертикальной плоскости цепной передачи 21, соединенной через систему шестерен с редуктором и двигателем. Одно из звеньев цепи соединено посредством поводка 22 с муфтой 4.
Втулка 3 оснащена приводом поворота, выполненным в виде силового цилиндра 23 со штоком 24, свободный конец которого содержит зубчатую рейку, введенную в зацепление с шестерней 23, закрепленной на втулке 3.
Устройство содержит таюке механизм фиксации изделия при кантоваЯии и механизм кантования.
Механизм фиксации изделия при кантовании состоит из двух сухарей 26, закрепленных на корпусе 1, двух
сухарей 27, каждый из которых за- .креплен на рейке 28, установленной в корпусе 1 с возможностью продольного перемещения и подпружиненной относительно неподвижного сухаря 26,
двух кулачков 29, каждый из которых закреплен на рейке 30, установленно в корпусе 1 с возможностью продельного перемещения. Кулачки 29 предназначены для взаимодействия с выступами 31 каретки 2. Рейки 28 и 30 соединены одна с другой блоком шестерен 32 и 33, образуя двухступенчатую реечную передачу с передаточным отношением, обеспечивающим удвоенну скорость перемещения сухарей 27 по сравнению со скоростью кулачков 29.
Механизм кантования содержит; основание 34, шарнирно соединенное с корпусом 1, индивидуальны} привод в виде мотор-редуктора 35 с ведущей шестерней 36, установленного на основании, зубчатый сектор 37, закрепленный на корпусе 1 и соединенный с ведущей шестерней 36.
Для фикса1ц и в поперечном направлении спутника 38 с обрабатываемым изделием предусмотрены направляющие планки 39. Ролики 40 служат опорами качения для перемещения спутника.
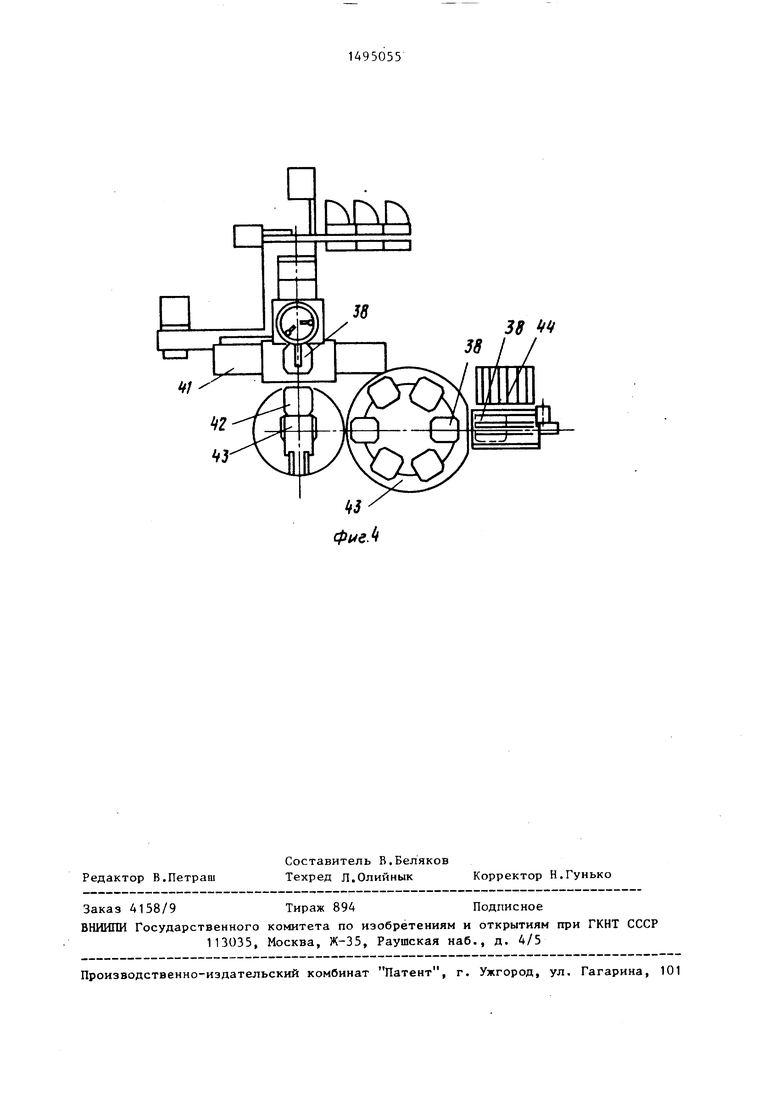
Устройство для перемещения изделий может входить в состав технологического комплекса, состоящего из ряда технологических единиц, например многоцелевого сверлильно-фрезер- но-расточного станка 41, устройства 42 автоматической смены спутников, поворотного магазина 43 для спутников 38, приемника 44 стружки.
Устройство может работать в режимах загрузки, выгрузки и кантования
В режиме загрузки спутник 38 с обрабатываемым изделием устанавливается цеховым транспортом между направляющими планками 39 на ролики 40 между подвижными сухарями 27, нахо- в крайнем левом положении, и неподвижными сухарями 26. Каретка 2 зафиксирована от продольного пере- меп;ения шариком 11. Включается силовой цилиндр 23, и при движении его штока 24 втулка 3 поворачивается на 90 , при зтом захватный орган 7 входит в паз спутника 38. Для расфикса- ции каретки 2 включается силовой цилиндр 14, шток 13 которого перемещается вправо. Шарики 11 и 12 утапливаются, освобождая каретку 2, при
этом вместе со штоком 13 вправо пере- ее вправо на расстояние вдвое большее
мещается и втулка 3 до упора правым торцом в корпус силового цилиндра 14. Включается привод каретки, досьтаю- щий муфту 4 до совмещения ее торцодлины кулачков 29 и, войдя в Т-обр ные пазы спутника 38, закрепляют е на корпусе 1. Далее включается мото редуктор 35 и происходит кантование
0
5
0
5
0
5
0
5
0
вой поверхности 6 с торцовой поверхностью 5 каретки 2 и далее перемещающий каретку 2 со спутником 38 в левое положение до конечного выключателя S 1 (не показан). При этом проточка каретки 2 устанавливается над шариками 11, а указанный привод отключается. Включается силовой цилиндр 14, пе- ремещая шток 13 влево и выжимая шарики 11 Б проточку каретки 2, фиксируя последнюю при неподвижном положении втулки 3, удерживаемой в правом положении пружиной 19, воздействующей на штифт 17.
При дальнейшем перемещении штока 13 его торец 45 упирается в торец 46 втулки 3 и перемещает ее влево, досылая каретку 2 до заданного положения, а с ней и спутник 38. Торцовая поверхность 5 каретки 2 отходит от торцовой поверхности 6 муфты 4, при этом последняя неподвижна. Далее включается силовой цилиндр 23, и при выдвижении его штока 24 втулка 3 по- ворачивается на 90 , а захватный орган 7 выходит из паза спутника 38. Шток 13 силового цилиндра 14 смещается вправо, расфиксируя каретку 2. )1,алее при включении привода каретки последняя перемещается в крайнее правое положение до соответствукяцего конечного выключателя S 2 (не показан). Режим окончен.
В режиме кантования каретка 2 и шток 13 силового цилиндра 14 находятся в крайнем левом положении. Включается силовой цилиндр 23, и при перемещении его штока 24 втулка 3 поворачивается на 90 и захватный орган 7 входит в паз спутника 38. Включается силовой цилиндр 14, шток 13 которого, смещаясь вправо, освобождает каретку 2. Включается привод каретки, перемещая последнюю в крайнее правое положение до конечного выключателя S 2, отключающего указанный привод.
В процессе перемещения каретки 2 ее выступы 31 сцепляются с кулачками 29, перемещая их вправо. Движение кулачков 29 с помощью реек 30, шестерен 32 и 33 и реек 28 передается сухарям 27. Сухари 27 перемещаются
длины кулачков 29 и, войдя в Т-образные пазы спутника 38, закрепляют его на корпусе 1. Далее включается мотор- редуктор 35 и происходит кантование
корпуса 1 с закрепленным, на нем изделием для очистки последнего от стружки. Затем корпус 1 возвращается в исходное положение. Режим окончен. В режиме выгрузки включается привод каретки, перемещая каретку 2 влево до совмещения проточки с шариками 11. Подвижные сухари 27 под действием пружины выходят из Т-образ- ньк пазов спутника 38, освобождая его. Конечный выключатель S 1 (не показан) отключает привод каретки и включает силовой цилиндр 14, шток 13 которого, смещаясь влево, выжимает шарики 11 в проточку при неподвижной втулке 3. Далее шток 13 досылает каретку 2, упираясь своим торцом А5 в торец 46 втулки 3. При этом каретка 2 занимает фиксированное положение, устанавливая спутник 38 между сухарями 26 и 27. В этом положении спутник 38 с изделием снимается с устройства. Режим закончен.
Технологический комплекс, в состав 25 посредством двух штифтов, закрепленкоторого входит устройство, работает в следующей последовательности.
Спутник 38 с закрепленной деталью становится на устройство с ориентацией его между направляющими планками 39, с помощью каретки 2 задвигается на поворотный магазин 43, загружая полностью его позиции. Далее происходит автоматическая обработка изделий, установленных на спутниках 38, на станке 41, при этом устройство 42 автоматической смены спутников принимает спутник 38 с изделием с поворотного магазина 43 и поворотом на 90° устанавливают его на стол станка 41, где спутник с изделием автоматически закрепляется и изделие обрабатывается. При этом, если на столе станка 41 ранее обрабатывалось изделие, то устройство 42 снимает его вместе со спутником и устанавливает его на устройство, на освободившуюся позицию. Таким образом, проходят об- , работку последовательно следующие три изделия. При появлении изделия на позиции, расположенной напротив устройства, его каретка 2 стягивает кассету на себя, корпус 1 устройства
кантуется в направлении приемника 44 , при этом стружка удаляется. Затем устройство возврап|ается в исходное положение и изделие со спутником снимается.
Формула изобретения
0
5
0
5
0
ных на втулке и штоке, и двух соответствующих ответных пазов, при этом каретка имеет возможность жесткой связи с втулкой через дополнительно введенный фиксируюп ий механизм, а с приводом - посредством дополнительно введенной осевой компенсирующей муфты, причем шток выполнен подпружиненным относительно втулки, а захватный орган закреплен на последней, при этом втулка установлена с возможностью поворота относительно продольной оси посредством кинематической связи с дополнительно введенным приводом поворота.
28
3Z
фие. 2
Б- Б
Z6
Фие. 5
| Авторское свидетельство | |||
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 0 |
|
SU381498A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
