Изобретение относится к машиностроению и может быть использовано в робототехнических комплексах.
Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания и повышение надежности за счет увеличения жесткости конструкции.
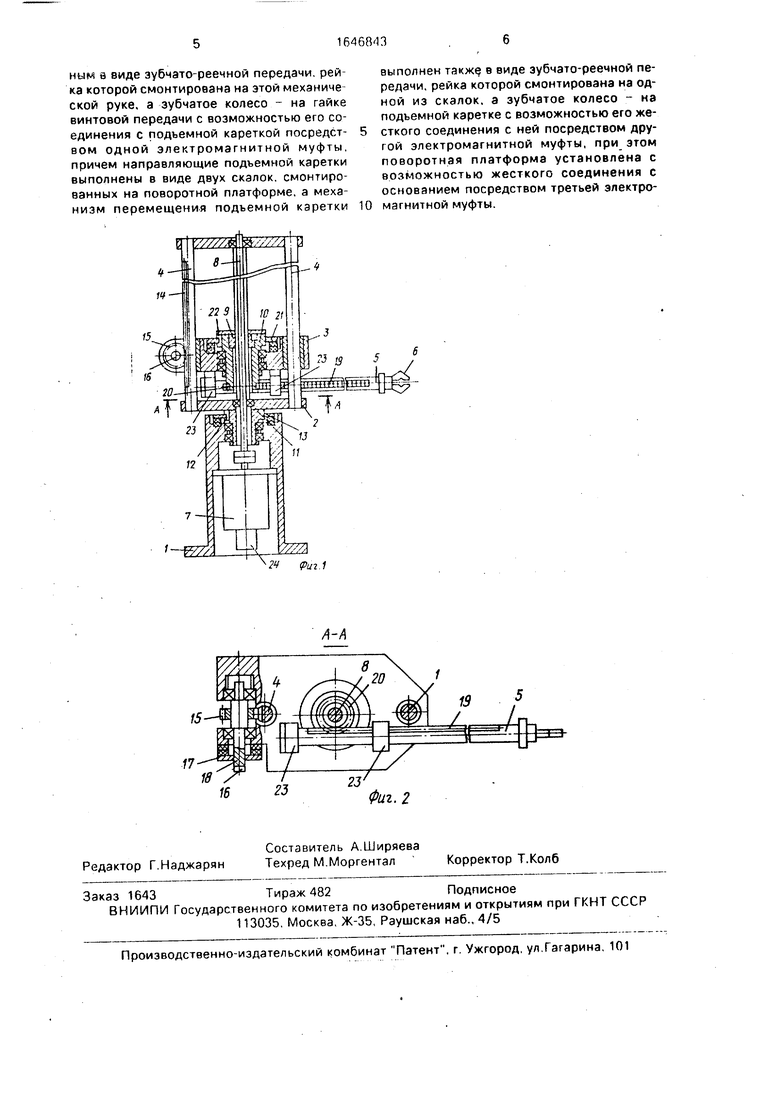
На фиг. 1 изображен манипулятор, общий вид; на фиг.2 - сечение А - А на фиг. 1.
Манипулятор состоит из основания 1, поворотной платформы 2, установленной на основании 1, подъемной каретки 3, размещенной с помощью втулок на направляющих, выполненных в виде двух скалок 4 цилиндрического типа, закрепленных на поворотной платформе 2, а также механической руки 5 с захватом 6, смонтированной на подъемной каретке 3, и привода перемещения механической руки 5
Привод перемещения механической руки включает двигатель 7, размещенный на основании 1, винтовую передачу, винт 8 которой установлен посредством подшипников на поворотной платформе 2 и связан с выходным валом двигателя 7, а гайка 9 жестко закреплена на втулке 10 с помощью шпоночного соединения, а также механизмы перемещения подъемной каретки и поворотной платформы и узел выдвижения механической руки.
о о
00
N со
Механизм перемещения поворотной платформы состоит из втулки 11с продольными пазами 12, жестко связанной с поворотной платформой 2 и установленной на основании 1 с помощью двух радиально- упорных подшипников, а также электромагнитной муфты, выполненной в виде диска 13, установленного с возможностью взаимодействия с основанием 1 и размещенного посредством выступов, выполненных, на внутренней поверхности, в продольных пазах 12 втулки 11.
Механизм перемещения подъемной каретки 3 состоит из зубчато-реечной передачи, зубчатая рейка 14 которой смонтирована на одной из скалок 4 направляющих, а зубчатое колесо 15 - на подъемной каретке 3 посредством вала 16, установленного с помощью двух радиальных подшипников, а также электромагнитной муфты, диск 17 ко- торой установлен с возможностью :оедине- ния вала 16 с подъемной кареткой 3, а его выступы на внутренней поверхности размещены в продольных пазах 18 вала 16
Узел выдвижения механической руки состоит из зубчато-реечной передачи, зубчатая рейка 19 которой смонтирована на механической руке 5, а зубчатое колесо 20 выполнено в виде зубчатого венца на втулке 10, установленной с помощью двух радиаль- но-упорных подшипников на подъемной каретке 3. Втулка 10 установлена с возможностью жесткого соединения с подъ емной кареткой посредством электромагнитной муфты, диск 21 которой имеет выступы на внутренней поверхности, размещенные в продольных пазах 22 втулки 10 Механическая рука 5 установлена в двух направляющих втулках 23.
При использовании обратной связи по положению можно применить один из связанных с выходным валом двигателя 7 импульсный датчик 24, с помощью которого можно контролировать положение всех трех степеней подвижности данного мани- пулятора. При этом нужно считывать импульсы по каждой степени подвижности в отдельные счетчики и программно соответственно коммутировать линию связи с импульсным датчиком 24 в зависимости от того, какая степень подвижности манипулятора должна быть задействована в данный момент времени.
Манипулятор работает следующим образом,
Для осуществления вертикального линейного перемещения механической руки 5 включаются электромагнитные муфгы ново ротной платформы 2 и гайки 9 виншвои передачи, а электромагнитная муфта подъ
емной каретки 3 отключается. При этом диск 13 соединяется с основанием 1, втулка 11 с поворотной платформой 2 затормаживается относительно основания 1, а диск 21 соединяется с подъемной кареткой 3, и втулка 10 вместе с гайкой 9 затормаживаются относительно подъемной каретки 3. Включается двигатель 7, и вращение винта 8 преобразуется посредством гайки 9 в поступательное перемещение подъемной каретки 3 вместе с механической рукой 5.
Для осуществления горизонтального линейного перемещения механической руки 5 включаются электромагнитные муфты поворотной платформы 2 и подъемной каретки 3, а электромагнитная муфта гайки 9 отключается При этом диск 17 соединяется с подъемной кареткой 3 и фиксируя цилиндрическое зубчатое колесо 15, затормаживает подъемную каретку 3 относительно скалок 4, а электромагнитная муфта поворотной платформы 2 затормаживает ее относительно основания 1 Включается двигатель 7, и вращение винта 8 передается гайке 9 и втулке 10 и посредством зубчатого колеса 20 и зубчатой рейки 19 преобразуется в поступательное перемещение механической руки 5
Для осуществления поворота механической руки 5 включаются электромагнитные муфты подъемной каретки 3 и гайки 9, а электромагнитная муфта поворотной платформы 2 отключается. При этом подъемная каретка 3 затормаживается относительно скалок 4, а гайка 9 затормаживается относительно подъемной каретки 3. Включается дви атель 7, и вращение винта 8 посредством гайки 9, втулки 10, диска 21, подъемной каретки 3 и скалок 4 передается поворотной платформе 2 и далее на механическую руку 5
Формула изобретения
Манипулятор содержащий основание, установленную на нем поворотную платформу, направляющие, на которых размещена подьемная каретка, несущая механическую руку с захватом, и привод перемещения механической руки, включающий двигатель установленный на основании винтовую передачу, винт которой кинематически связан с выходным валом двигателя, механизмы перемещений подъемной каретки и поворотной платформы, а также электромагнитные муфты, отличающийся тем, что, с целью расширения технологических возможностей за счетувеличения зоны обслуживания и повышения надежности за счет увеличения жесткости конструкции, он снабжен узлом выдвижения механической руки, выполненным а виде зубчато-реечной передачи, рейка которой смонтирована на этой механиче ской руке, а зубчатое колесо - на гайке винтовой передачи с возможностью его соединения с подъемной кареткой посредством одной электромагнитной муфты, причем направляющие подъемной каретки выполнены в виде двух скалок, смонтированных на поворотной платформе, а механизм перемещения подъемной каретки
выполнен также в виде зубчато-реечной передачи, рейка которой смонтирована на одной из скалок, а зубчатое колесо - на подъемной каретке с возможностью его жесткого соединения с ней посредством другой электромагнитной муфты, при этом поворотная платформа установлена с возможностью жесткого соединения с основанием посредством третьей электромагнитной муфты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1660953A1 |
| Промышленный робот | 1986 |
|
SU1509244A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Театральная площадка | 1981 |
|
SU977657A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Устройство опрокидывания контейнеров для разгрузки | 1987 |
|
SU1498679A1 |
| Устройство для подачи листа | 1981 |
|
SU1030074A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнических комплексах. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания и повышение надежности за счет повышения жесткости конструкции. Манипулятор состоит из основания 1, на котором с возможностью вращения установлена поворотная платформа 2, подъемной каретки 3, расположенной на направляющих в виде двух скалок 4, смонтированных на поворотной платформе 2, а также механической руки 5 с захватом 6. Перемещение механической руки 5, подъемной каретки 3 и поворотной платформы 2 осуществляется от одного двигателя 7. Механизм перемещения подъемной каретки 3 и узел выдвижения механически руки 5 выполнены в виде зубчато-реечных передач. Причем зубчатые колеса этих передач, размещенные на подъемной каретке 3 и гайке 9 винтовой передачи, и поворотная платформа 2 установлены с возможностью жесткого соединения соответственно с подъемной кареткой 3 и с основанием 1 посредством электромагнитных муфт. 2 ил. сл
V4 риг 1
Фиг. 2
| Устройство для перемещения выходного звена манипулятора | 1985 |
|
SU1291385A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
