Изобретение относится к области машиностроения и предназначено для автоматизации технологических процессов сборки и других операций на основе применения промышленных робо- тон и манипуляторов,
Целью изобретения является расширение функциональных возможностей захвата за счет возможности без переналадки задающего устройства на но- вое предельно допустимое усилие сжатия использовать робот-манипулятор для работы со следующими друг за другом объектами при существенном разбросе их прочностных и упругих свойств.
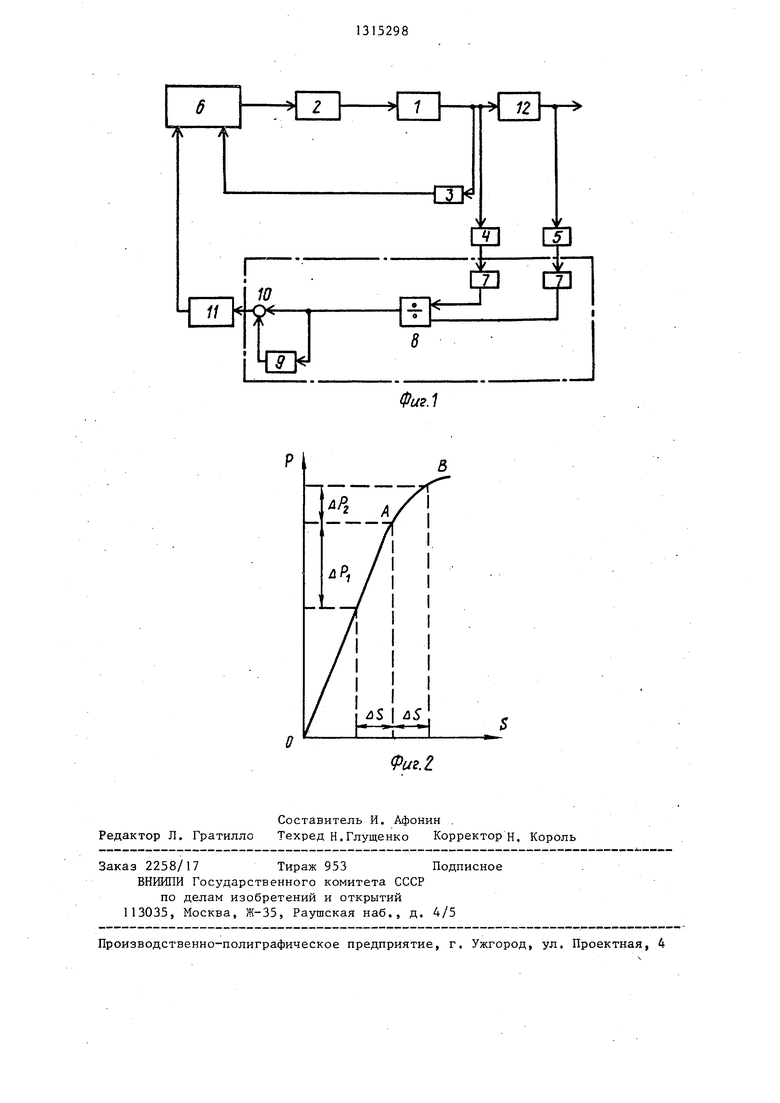
На фиг. 1 изображена структурная схема адаптивного захвата робота- манипулятора; на фиг. 2 график напряжений материала в зависимости- от деформации.
Робот-манипулятор содержит основание с зажимными губками 1, кинематически связанными между собой, привод 2 перемещения , датчик 3 проскальзывания захватываемого объекта, датчик 4 перемещения губок друг оносительно друга, являющийся также датчиком деформации объекта, тактильные датчики 5 усилия сжатия, установ ленные на рабочих поверхностях губок, систему 6 управления, дифференцирующие устройства 7, блок 8 деления, блок 9 памяти, блок 10 сравнения, блокирующее устройство 11, зах- ватываемый объект 12.
Захват работает следующим образом.
После того, как губки I захвата прищли в соприкосновение с объектом 12, делается попытка приподнять объект. В случае проскальзывания объекта между губок на выходе датчика 3 проскальзывания появляется сигнал, подаваемый на вход системы 6 управления. По команде системы управления делается сжимающий пробный шаг, после чего-сигналы сдатчика 4 перемещения .и датчиков 5 усилия по- падают на входы дифференцирующих устройств 7. Сигналы на их выходах равны соответственно приращению деформации д S и приращению давления ЛР, которые могут быть определены как первые разности:
ЛР Р,, - Р;; . S S I - S,.,
, Эти сигналы подаются на входы блока 8 деления, с выхода которого ,сигнал, равный отношению приращения давления и приращению деформации
--.подается на вход блока 9 памяти.
.;1Ь
Сигнал с выкода блока памяти
ЛР;
Z. --- попадает на блок 10 сравнения,, где сравнивается с сигналом на выходе блока деления в последующий момент времени Z. --. Если
ДЬ,эти сигналы равны , то на выходе блока сравнения сигнал отсутствует. Это соответствует участку ОА (фиг 2) упругих деформаций материала, что означает возможность дальнейшего сжатия объекта без повреждения .
Дальнейшее сжатие произойдет в случае проскальзывания объекта.
Если эти сигналы не равны Z ; Z,-4- что соответствует участку - АВ (фиг. 2), характеризующему наступление минимальных остаточных деформаций объекта, на вход блокирующего устройства 11 подается сигнал, запрещающий дальнейшее сжатие, и привод перемещения губок захвата блокируется .
Формулаизобретения
Адаптивный захват робота-манипулятора, содерлсащий основание с установленными на нем зажимными губками привод перемещения губок с системой управления и связанные с ней датчик проскальзывания захватываемого объекта и датчики усилия сжатия, установленные на губках, отличающийся тем, что, с целью расширения функциональных возможностей, в него дополнительно введен.. блок автоматического определения момента наступления остаточных деформаций, связанный через блокирующее устройство с системой -управления и состоя- ший из двух дифференцирующих устройств, вход одного из которых подключен к выходу датчика перемещения губок, а вход другого - к выходу датчиков усилия сжатия, блока деления, входы которого соединены с выходами дифференцирующих устройств, и блока сравнения, причем выход блока,деления связан с одним из входов блока сравнения непосредственно, а с другим - через блок памяти.
Составитель И. Афонин . Редактор Л. Гратилло Техред Н.Глущенко Корректор н. Король
Заказ 2258/17 Тираж 953 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(Pus.Z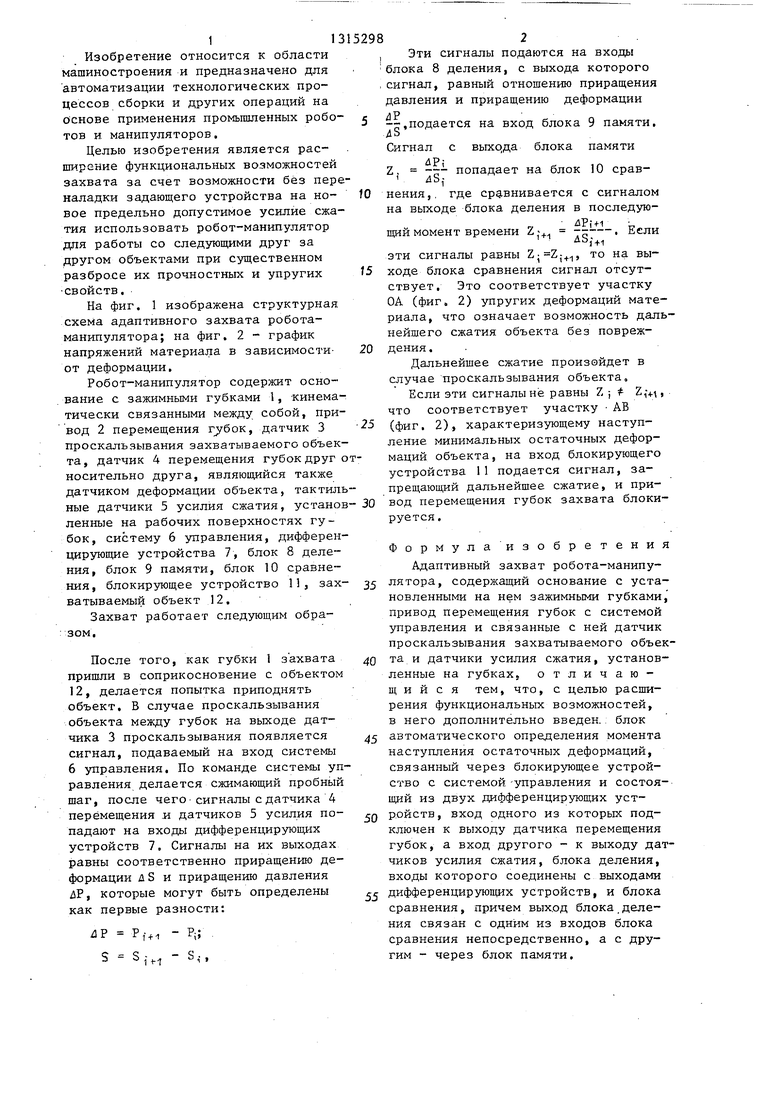
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1973 |
|
SU433023A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
Изобретение относится к области машиностроения и предназначено дл автоматизации технологических процессов сборки и других операций на основе применения промышленных роботов и манипуляторов..Цель изобрете- ния состоит в расширении функциональных возможностей. Для этого в устройство, содержашее основание с зажимными губками, кинематически связанными между собой, привод их перемещения, датчик проскальзывания захватываемого объекта, связанный через систему управления с приводом, тактильные датчики усилия сжатия, датчик перемещения губок, введены последовательно соединенные блок автоматического определения момента- наступления остаточных деформаций и блокирующее устройство. При этом вход блока автоматического определения момента наступления остаточных деформаций соединен с датчиками усилия сжатия и перемещения губок, а выход, блокирующего устройства через систему управления соединен с приводом перемещения губок. 2 ил., (Л сд к со 00
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
