1
Изобретение предназначено для транспортировки и ориентирования в пространстве материальных тел разного веса и конфигурации и может быть использовано в автоматических и дистанционно управляемых манипуляторах.
Известен захват манинулятора, выполненный в виде связанных с управляемым приводом зажимных губок, на которых установлены соответственно датчики, определяющие проскальзывание объекта относительно губок. При выскальзывании объекта манипулирования из захвата, последний передает информадию управления имитатору проскальзывания, а тот создает у оператора соответствующее ощущение. Под воздействием ощущения оператор увеличивает усилие сжатия на задающем органе манипулятора, это усилие преобразуется в электрический сигнал, и но каналу связи задающего органа и захвата передается зажимному механизму захвата. Усилие сжатия объекта манипулирования возрастает, и выскальзывание прекращается. Однако известными захватами невозможно автоматически устранить проскальзывание объекта манинулирования относительно губок захвата.
Предлагаемый захват отличается тем, что он снабжен потенциометром, ротор которого кинематически связан с датчиком проскальзывания, а статор через управляемую муфту соединен с приводом губок, причем ротор потенциометра электрически связан с блоком управления приводом, а датчик соприкосновения - с блоком управления приводом и блоком управления муфтой.
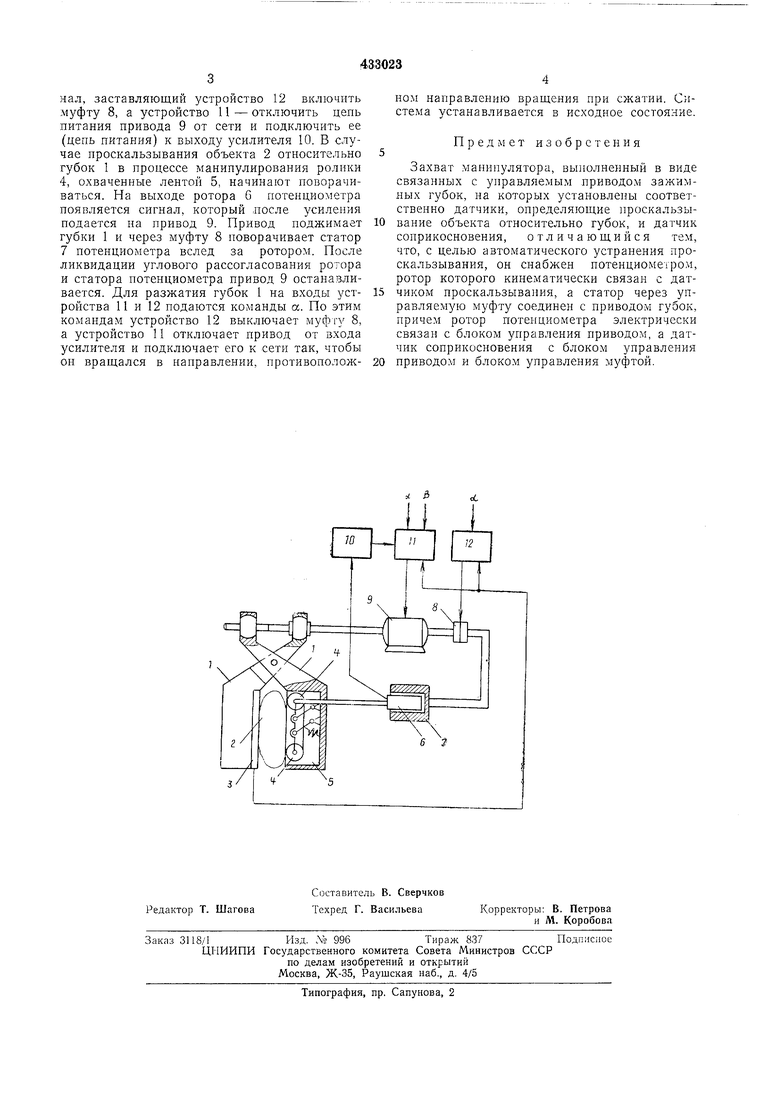
Па чертеже изображен предлагаемый захват.
Он содержит зажимные губки 1, захватывающие объект 2 манипулирования, установленный на одной губке контактный датчик 3
соприкосновения, а на другой губке - проскальзывания, содержащий подпружиненные ролики 4, охваченные бесконечной гибкой лентой 5, потенциометр, ротор б которого кинематически соединен с одним из роликов 4,
а статор 7 через управляемую (например, электромагнитную) муфту 8 связан с приводом 9 механизма зажима губок. Ротор б через усилитель 10 электрически связан с устройством 11, управляющим приводом 9, а датчик соприкосновения 3 также электрически связан с устройством 11 и с устройством 12, управляющим муфтой 8.
В исходном состоянии сигналы на вы.ходе датчика 3 и ротора б отсутствуют, муфта 8 и
привод 9 выключены. При подаче на вход устройства 11 команды р (сжатие губок) привод 9 включается, и губки 1 начинают сходиться (муфта 8 остается выключенной). Прн сжатии объекта 2 с силой, достаточной для срабатывання датчика 3, последний выдает снгнал, заставляющий устройство 12 включить муфту 8, а устройство 11 - отключить цепь питания привода 9 от сети и подключить ее (цепь питания) к выходу усилителя 10. В случае проскальзывания объекта 2 относительно губок 1 в процессе манипулирования ролики 4, охваченные лентой 5, начинают поворачиваться. На выходе ротора G потенциометра появляется сигнал, который после усилепия подается на привод 9. Привод поджимает губки 1 и через муфту 8 поворачивает статор 7 потенциометра вслед за ротором. После ликвидации углового рассогласования ротора и статора потенциометра привод 9 останавливается. Для разжатия губок 1 на входы устройства 11 и 12 подаются команды а. По этим командам устройство 12 выключает муфгу 8, а устройство 11 отключает привод от входа усилителя и подключает его к сети так, чтобы он вращался в направлении, противоположно.м направлению вращения при сжатии. Система устанавливается в исходное состояние.
Предмет изобретения
Захват манипулятора, выполненный в виде связанных с управляемым приводом зажимных губок, на которых установлены соответственно датчики, определяющие проскальзывание объекта относительно губок, и датчик соприкосновения, отличающийся тем, что, с целью автоматического устранения проскальзывания, он снабжен нотенциометром, ротор которого кинематически связан с датчиком проскальзывания, а статор через управляемую муфту соединен с приводом губок, причем ротор потенциометра электрически связан с блоком управления приводом, а датчик соприкосновения с блоком управления приводом и блоком управления муфтой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| ЗАХВАТ ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1971 |
|
SU290825A1 |
| Адаптивный захват робота-манипулятора | 1985 |
|
SU1315298A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
3
