fO
9 сигналы с датчиком 2 усилия сжатия не поступают, следов тельно, их разность равна 0. На вы де компаратора будет сигнал нулево уровня, который через инвертор 10 двухканальный коммутатор 11 подклю к измерению сигнал с датчика 2, н пример левой губки, так как на упр ляющем входе коммутатора 11 будет сигнал 1.
f5
I 1323376
Изобретение относится к робототех- компаратора вике и предназначено ,цля транспортировки и ориентирования в пространстве объектов разного веса и конфигурации и может быть использовано в автомати- 5 ческих манипуляторах.
Целью изобретения является повышение надежности путем автоматического поддержания усилия схвата объекта манипулирования независимо от его ориентации в пространстве.
На фиг,1 изображен схват и схема его управления; на фиг.2 - произволь но-ориентированный в пространстве схват с объектом манипулирования.
Схват манипулятора содержит ЗсШим- ные губки 1, установленные в них датчики 2 усилия сжатия, объект 3 управления, привод 4 механизма зажима губок, блок 5 управления приводом, блок 20 компаратора будет сигнал нулевого
6компенсации силы тяжести объекта манипулирования, содержащий усилители
7и 8, компаратор 9, инвертор 10 и двухканальный коммутатор 11.
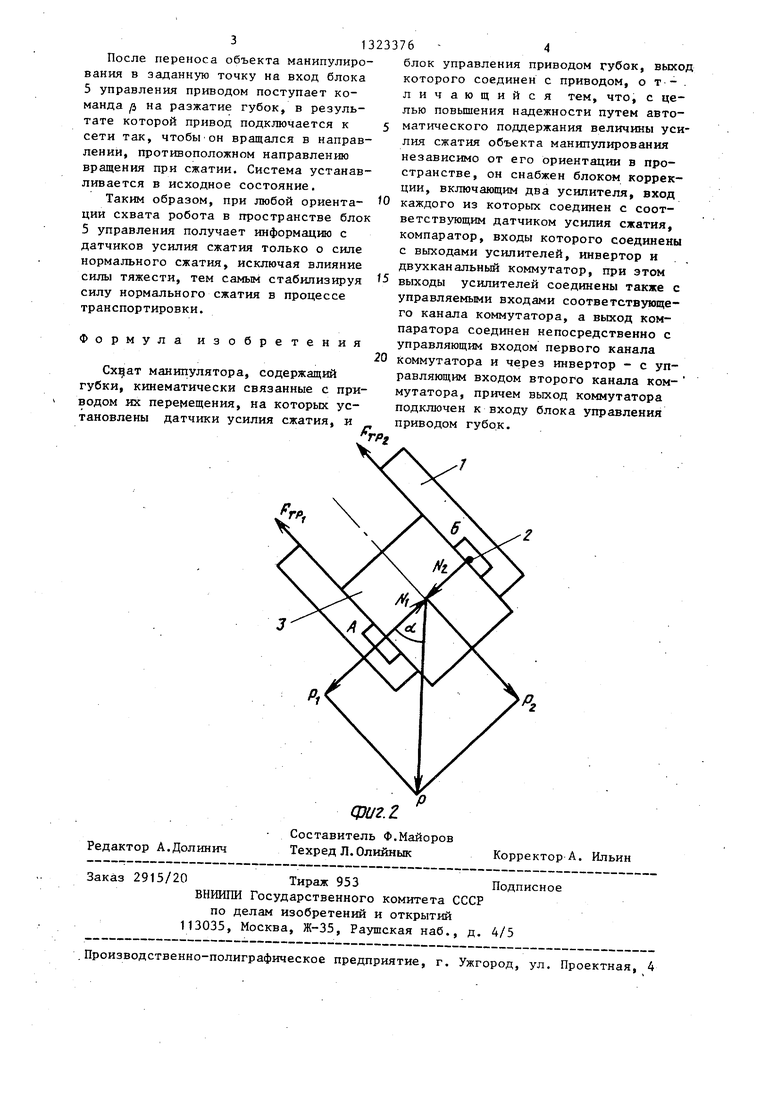
На фиг.. 2 представлен произвольно ориентированный захват манипулятора в пространстве при переносе объекта манипулирования 3 и действующие при этом силы на датчики 2 усилия сжатия, установленные в губках захвата:где Р-30 сила тяжести объекта манипулирования 3; N, и N, - силы нормального сжатия манипулирования, действующие
э- 25
При подаче на вход блока 5 упра ления команды d на сжатие губок пр вод 4 включается и губки 1 начинаю сходиться. На входы компаратора 9 новременно будут поступать однопол ные аналоговые сигналы с обоих дат ков 2, следовательно, разность эти сигналов будет равна О и на выхо
уровня, который опять подключит к мерению датчик 2 левой губки, т.е информация об усилии сжатия в проц се захвата будет сниматься с этог датчика и поступать в блок 5 упр ления приводом. При сравнении это сигнала с сигн,алом задания, опреде ющим необходимую силу сжатия, прив 4 прекращает сжатие объекта 3.
г со стороны губок схвата; Р и составляющие силы тяжести объекта, FT-B и F-rp2 - силы трения при проскальзывании объекта манипулирования относительно губок схвата.
В процессе переноса захваченно объекта и различной ориентации с та манипулятора в пространстве на датчики 2 усилия сжатия начинает
ствовать сила тяжести объекта ман лирования, в результате разность дных аналоговых сигналов, поступа на вход компаратора 9, уже не рав нулю, а будет определяться состав
Исходя из условия равновесия сил и равенства сил, определяют силу,, действующую на датчик усилия, установленный в нижней губке
N N + P-coso, т.е. для указанного положения захвата манипулятора на датчик сжатия, установленный в нижней губке, будет действовать составляющая силы тяжести объекта манипулирования, равная Р,, P-coso, которая, сз мируясь с силой нормального сжатия N, будет способствовать увеличению выходного с игнала с датчика усилия сжатия, установленного в нижней губке.
В исходном состоянии, когда объект манипулирования 3 не подвергаетсязахвату губками 1 схвата, на входы усилителей 7 и 8, а следовательно, и
O
9 сигналы с датчиком 2 усилия сжатия не поступают, следовательно, их разность равна 0. На выходе компаратора будет сигнал нулевого уровня, который через инвертор 10 и двухканальный коммутатор 11 подключит к измерению сигнал с датчика 2, например левой губки, так как на управляющем входе коммутатора 11 будет сигнал 1.
компаратора 5
компаратора будет сигнал нулевого
При подаче на вход блока 5 управления команды d на сжатие губок привод 4 включается и губки 1 начинают сходиться. На входы компаратора 9 одновременно будут поступать однополяр- ные аналоговые сигналы с обоих датчиков 2, следовательно, разность этих сигналов будет равна О и на выходе
компаратора будет сигнал нулевого
уровня, который опять подключит к измерению датчик 2 левой губки, т.е. информация об усилии сжатия в процессе захвата будет сниматься с этого датчика и поступать в блок 5 управления приводом. При сравнении этого сигнала с сигн,алом задания, определяющим необходимую силу сжатия, привод 4 прекращает сжатие объекта 3.
В процессе переноса захваченного объекта и различной ориентации схвата манипулятора в пространстве на датчики 2 усилия сжатия начинает действовать сила тяжести объекта манипулирования, в результате разность входных аналоговых сигналов, поступающих на вход компаратора 9, уже не равна нулю, а будет определяться составляющей силы тяжести объекта манипулирования, соответственно этому компаратор при сравнении по модулю двух сигналов будет выдавать на выходе О 1ши 1, а коммутация сигнала в блок
5 управления привода будет происходить по наименьшему значению из двух сравниваемых сигналов, так как коммутатор 11 управляется сигналами единичного уровня, т.е. увеличение сигнала на одном из датчиков в результате действия силы тяжести приводит к срабатыванию компаратора и кбммутации наименьшего значения сигнала с проти- вопо ложного датчика, на которьй не
действует сила тяжести, тем самым сохраняется информация, поступающая в блок 5 управления о нормальной силе сжатия, установленной лри захвате объекта манипулирования.
После переноса объекта манипулирования в заданную точку на вход блока 5 управления приводом поступает команда /5 на разжатие губок, в результате которой привод подключается к сети так, чтобыон вращался в направлении, противоположном направлению вращения при сжатии. Система устанавливается в исходное состояние.
Таким образом, при любой ориентации схвата робота в ггространстве блок 5 управления получает информацию с датчиков усилия сжатия только о силе нормального сжатия, исключая влияние силы тяжести, тем самым стабилизируя силу нормального сжатия в процессе транспортировки.
Формула изобретения
Схдат манипулятора, содержащий губки, кинематически связанные с приводом их перемещения, на которых установлены датчики усилия сжатия, и
O
5
0
блок управления приводом губок, выход которого соединен с приводом, от--, личающийся тем, что, с целью повышения надежности путем автоматического поддержания величины усилия сжатия объекта манипулирования независимо от его ориентации в пространстве, он снабжен блоком коррекции, включающим два усилителя, вход каждого из которых соединен с соответствующим датчиком усилия сжатия, компаратор, входы которого соединены с выходами усилителей, инвертор и двухканальный коммутатор, при этом выходы усилителей соединены также с управляемыми входами соответствующего канала коммутатора, а выход компаратора соединен непосредственно с управляющим входом первого канала коммутатора и через инвертор - с управляющим входом второго канала ком- мутатора, причем выход коммутатора подключен к входу блока управления приводом губок.
фиг. г
Редактор А.Долинич
Составитель Ф.Майоров Техред Л.Олийнык
Заказ 2915/20Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Ильин
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления схватом манипулятора | 1984 |
|
SU1193635A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Сортирующее устройство | 1984 |
|
SU1245357A1 |
| Манипулятор для длинномерных объектов | 1982 |
|
SU1161380A1 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
Изобретение относится к робототехнике, предназначено для транспортировки и ориентирования в пространстве объектов разной массы и конфигурации и может быть использовано в автоматических манипуляторах. Целью изобретения является повышение надежности путем автоматического поддержания усипия сжатия объекта манипулирования независимо от его ориентации в пространстве. При захвате объекта 3 губками 1 схвата с датчиков 2 усиod ЛИЯ сжатия через усилители 7 и 8 на входы компаратора 9 одновременно будут поступать однополярные аналоговые сигналы, разность которых будет равна О, на выходе компаратора будет сигнал нулевого уровня и сигнал с одного из датчиков будет сравниваться с заданными в блоке 5 управления. При переносе объекта 3 и различной ориен- . тации.схвата на датчики 2 начнет действовать сила тяжести объекта, в результате чего разность входных аналоговых сигналов, поступающих на вход компаратора 9, уже не будет равна нулю и на его выходе будут О или 1, а коммутация сигнала в блок 5 управления будет происходить по наименьшему значению из двух сравниваемых сигналов. Таким образом, при любой ориентации схвата в пространстве блок 5 управления получает информации) только о силе нормального сжатия. 2 ил. . i ЙЬ JSassS. GO ЮСО О5 (ригЛ
| ЗАХВАТ МАНИПУЛЯТОРА | 1973 |
|
SU433023A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
