(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Схват промышленного робота | 1983 |
|
SU1121134A1 |
1
Изобретение относится к машиностроению и может быть использовано при проектировании промышленных роботов (манипуляторов), служащих для подачи деталей к станкам, например, автоматической линии.
Известен схват манипулятора, содержащий корпус, вал привода и две пары зажимных губок, кинематически связанных попарно 1.
Недостаток известного схвата заключается в низкой надежности работы.
Цель изобретения - повышение надежности работы.
Цель достигается тем, что схват манипулятора снабжен дополнительным валом с кулачками и дополнительным корпусом, установленным с возможностью качания вокруг оси вала привода, причем дополнительный вал кинематически связан с валом привода и размещен в дополнительном корпусе параллельно оси качания, а, по крайней мере одна из каждой пары губок снабжена рычагом с роликом, предназначенным для взаимодействия с кулачком.
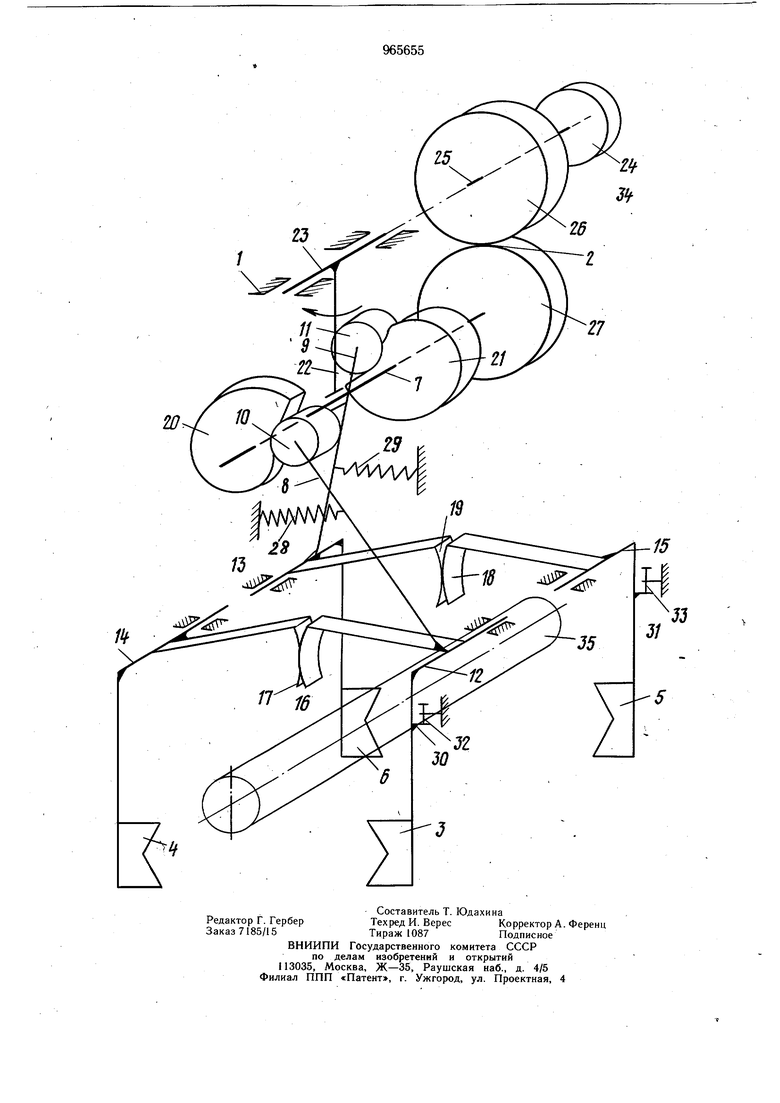
На чертеже изображена кинематическая схема схвата.
Схват манипулятора содержит корпус 1, привод под общим обозначением 2 и две пары зажимных губок соответственно 3,4 и 5,6. Дополнительный вал 7, кинематически связанный с зажимными губками с помощью механических передач, которые включают приводные рычаги 8 и 9, с роликами 10 и 11, которые с помощью цапф 12 и 13 закреплены в расточках корпуса 1. С приводными рычагами 8 и 9 жестко связаны зажимные губки 3 и 6, а губки 4 и 5 жестко
° связаны с цапфами 14 и 15, которые также смонтированы в расточках корпуса 1. На цапфах 12, 15 и 13, 14 закреплены две пары зубчатых секторов 16, 17 и 18, 19, которые, соответственно, находятся в постоянном зацеплении.
15
Ведущий элемент, выполненный двух кулачков 20 и 21, жестко закрепленных на дополнительном валу 7, смонтированном в дополнительном корпусе 22, подвижно закрепленном с помощью оси 23 в корпусе
20 схвата. Причем, каждый кулачок 20 и 21
,. ведущего элемента взаимодействует с соответствующим ему роликом 10 или 11, приводных рычагов 8 и 9. Приводной вал 7 получает вращение от двигателя, например.
через самотормозящуюся червячную и цепную передачи (не показаны). Звездочка 24 цепной передачи закреплена на валу привода 25, смонтированном в расточке корпуса механической руки. На этом же валу закреплена цилиндрическая шестерня 26, находящаяся в постоянном зацеплении с щестерней 27, жестко закрепленной на дополнительном валу 7 и имеющей возможность обкатываться вокруг цилиндрической щестерни 26 в процессе качания дополнительного корпуса 22. Ролики 10 и И, приводных рычагов 8 и 9 постоянно прижаты к рабочей поверхности дисковых кулачков с помощью пружин 28 и 29, которые в процессе разжима изделия разводят зажимные губки.
Зажимные губки 3 и 5 снабжены кронштеинами 30 и 31, которыми они упираются в упоры 32 и 33, закрепленные на корпусе схвата. Эти упоры ограничивают угол раскрытия зажимных губок.
Схват щарнирно крепится к механической руке 34 манипулятора (показана частично).
Предложенный схват манипулятора работает следующим образом.
Механическая рука манипулятора перемещает схват в зону обработки детали или на позицию транспортера и совмещает линию центров зажи1С ных губок с осевой линией детали. После этого включается приводной двигатель (не показан). Вращение от приводного двигателя ,по кинематической цепи передается звездочке 24, которая передает вращение через вал привода 25, пару цилиндрических щестерен 26 и 27 дополнительному валу 7. Вращаясь, дополнительный вал 7 вращает кулачки 20 и 21 против часовой стрелки. Дисковые кулачки, взаимодействуя с роликами 10 и И, приводных рычагов 8 и 9, поворачивают последние совместно с цапфами 12 и 13 и зажимными губками 3 и 6. Это движение через зубчатые секторы 17, 16 и 19, 18 передается зажимным губкам 4 и 5, в результате -чего зажимные губки 3, 4 и 5, 6 сходятся и зажимают деталь 35. Если деталь 35 не имеет ступеней различных диаметров, то на этом зажим заканчивается и манипулятор может транспортировать ее на другую позицию. Произвольное разжатие зажимных губок произойти не может, так как в кинематической цепи привода вращения ведущего элемента может быть предусмотрен червячный редуктор (не показан).-И кроме того, самопроизвольное разжатие зажимных губок не может произойти еще и потому, что угол подъема рабочей поверхности дисковых кулачков может не превышать угла самоторможения.
Если зажимные губки 3 и 4 захватывают деталь за больший диаметр, а зажимные губки 5 и 6 - за меньший, при условии, что деталь имеет шейки различных диаметров, то как только зажимные губки 3 и 4 касаются поверхности детали, отклонение приводного рычага 8 прекращается, а дисковые кулачки 20 и 21 продолжают вращаться. Тогда ведущий элемент начинает поворачиваться совместно с осью 23 в направлении, показанном стрелкой А, отжимаясь дисковым кулачком 20 от ролика 10. В этом случае приводной рычаг 9 продолжает отклоняться и подводить зажимные губки 5 и 6 к поверхности захватываемой детали. Как только зажимные губки 5 и 6 касаются поверхности детали, происходит окончательный зажим детали всеми зажимными губками. При отклонении приводйых рычагов 8 и 9 пружины 28 и 29 растягиваются, постоянно прижимая ролики 10 и И к рабочей поверхности дисковых кулачков.
Разжим детали происходит после изменения направления вращения дополнительного вала 7, п сусле у.становки детали 35 в требуемую позицию, с поТугощыо пщжнн 28 и 29, которые поворачивают приводные рычаги в направлении, обратном зажиму. Как только зажимные губки освобождают деталь, механическая рука манипулятора перемещает захват в требуемое положение, и цикл повторяется.
Технико-эконом1 ческая эффективность изобретения заключается в повышении надежности.
Формула изобретения
Схват манипулятора, содержащий корпус, вал привода и две пары зажимных губок, кинематически связанных попарно, отличающийся тем, что, с целью повышения надежности работы, он снабжен дополнительным валом с кулачками и дополнительным корпусом, установленным с возможностью качания вокруг оси вала привода, причем дополнительный вал кинематически связан с валом привода и размещен в дополнительном корпусе параллельно оси качания, а, по крайней мере, одна из каждой пары губок снабжена рычагом с роликом, предназначенным для взаимодействия с кулачком.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 751616, кл. В 25 J 3/04, 1978.
