Устройство относится к системам автоматики и может быть использовано в автоматизированных системах управления машинами, механизмами, поточными линиями и т.д.
Целью изобретения является расширение области использования устройства за счет обработки логических функций с временными задержками.
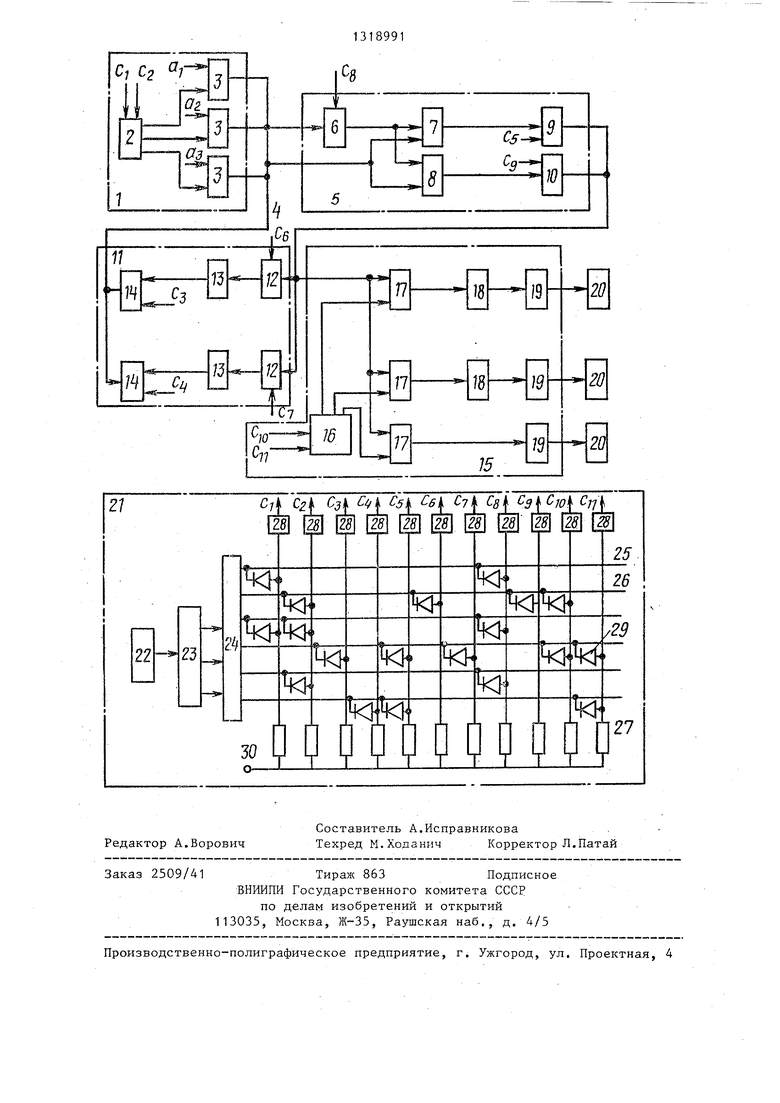
На чертеже представлена функциональная схема устройства для дистанционного программного управления электроприводными механизмами.
Устройство содержит входной блок
fO
А1 X А2; Л1 + А2-, А1 + А2; А А1 + А2, где А1 и А2 - входы 5 и А есть инверсия А.
В качестве элементов 12 и ти могут использоваться, нап стандартные триггеры, В каче лителей преобразователей 19 использоваться стандартные э например полупроводниковые ли, герконовые реле и т,п,
В качестве элементов заде гут использоваться стандартн времени, например, входящие выпускаемой промьтшенностью
1, содержащий дешифратор 2, с элемен- 15 элементов Логика И и т,п.
теми 3 совпадения, выходы которых подключены к информационной шине 4, вычислительный блок 5, содержащий триггер 6 записи, элементы И 7 и ИЛИ 8, элементы 9 и 10 считывания, . блок 11 оперативной памяти, содержащий элементы 12 памяти, элементы 13 задержки, элементы 14 считывания, выходной блок 15, состоящий из дешифратора 16, элементов 17 памяти, элементов 18 задержки и элементов 19 усиления и преобразования. Устройство также содержит электроприводные механизмы 20, .
Работой устройства управляет блок 30 ловиям технологического з апуска 21 задания программ, содержащий ге- электроприводов необходимо включить нератор 22 импульсов, счетчик 23 верхний (фиг, 1) механизм 20 через импульсов, дешифратор 24, горизонтальные шины 25, вертикальные шины
t с после выполнения условия, что один из входных сигналов а., или а.
1 ИЛИ оба вместе равняются логической
26, резисторы 27, инверторы 28 и диоды 29, клемму 30 питания,
К клемме 30 подключается источнук напряжения, питающий устройство. Элементы 19 служат для преобразования сигналов форму, необходимую для управления механизмами 20,
а, а., а. обозначают информационные дискретные сигналы-на входах входного блока 1, поступающие от дискретных датчиков, например от путевых выключателей (не показаны), и калда;ьй имеет значение, либо логического О, либо логической 1,
Запись информации, поступающей На верхние входы во всех элементах записи, осуществляется по заднему фронту импульсов (команд) С , Реализация такого режима работы Элемента записи возможна при использовании стандартных триггеров.
На одном такте блок 5 может вычислить одну из следующих логических функций: А1 X A2j А1 х А2; А1 х А2;
А1 X А2; Л1 + А2-, А1 + А2; А1 + А2; А1 + А2, где А1 и А2 - входы блока ; 5 и А есть инверсия А.
В качестве элементов 12 и 17 памяти могут использоваться, например, стандартные триггеры, В качестве усилителей преобразователей 19 могут использоваться стандартные элементы, например полупроводниковые усилители, герконовые реле и т,п,
В качестве элементов задержки могут использоваться стандартные реле времени, например, входящие в состав выпускаемой промьтшенностью серии
элементов Логика И и т,п.
Дешифратор 16 служит для уменьше-), ния количества линий связи между блоком 21 задания программ и выходным блоком 15, Количество элементов памяти 12 и 17, задержки 13 и 18 и считывания 14 зависит от сложности вычисляемой функции и количества электропроводов и может иметь любое конечное число. Для приведенного примера оно ограничено небольшим количеством, чтобы не затенять принципа работы устройства.
Пример, Допустим, что по ус30 ловиям технологического з апуска электроприводов необходимо включить верхний (фиг, 1) механизм 20 через
t с после выполнения условия, что один из входных сигналов а., или а.
35
1 ИЛИ оба вместе равняются логической
1, т,е, после реализации логической функции (а + a,j)-t. Также необходимо включить нижний механизм 20 через время t после того, как Q реализуется функция а + aj и значение а, будет равно 1, т,е, общая функция включения будет иметь вид
(а,
a).t,.
3
Средний механизм
20 должен включаться через время t, jj после того, как реализуется функция (а + а). , где t - необходимая задержка времени перед включением среднего механизма 20 после того, как функция (а + примет значение логической 1, Установим верхний элемент 13 задержки на время задержки t, нижний элемент задержки 13 на время задержки t, верхний элемент 17 памяти на время задержки t., нижний элемент 17 памя0
5
-1
ти на время задержки tj.
Работа устройства, реализующего заданньй алгоритм работы осуществляется по тактам следующим образом.
3131
На первом такте -активизируется верхняя горизонтальная шина 25 блока 21 и под действием единичных команд С и Cj значение сигнала а записывается в триггер 6 записи и подается на верхний вход элемента ИЛИ 8,
На втором такте также активизируется вторая (счет идет сверху вниз) горизонтальная шина 25 и под действием единичных команд С Сд, С,, сигнал а. подается на нижний вход элемента ИЛИ 8 и результат вычисления функции а + а записывается в верх- нюЕо ячейку 12 памяти блока 11 оперативной памяти и одновременно в верхний элемент памяти (триггер) 17 выходного блока 15. При этом через время t, включается верхний механизм 20.
На третьем такте под действием команд С, С- и С, значение а, записывается в триггер 6 записи и появится на верхнем входе элемента И 7.
На четвертом такте активизируется четвертая горизонтальная шина 25 и под действием команд Cj , С , С
- It
результат вычисления функции
записывается в ниж(а, + а,) -t НИИ элемент 17 памяти выходного блока 15 и далее через элемент 19 включается нижний механизм 20, если значение вычислительной функции (а + + а) t -а , равно логической 1. i На этом же .такте под действием команды C значение функции (а + + а,)- а записывается в нижний элемент 17 памяти блока 11 оперативной памяти,
На пятом такте активизируются пятая горизонтальная шина 25 и под действием команд С, и Сд значение а записывается в триггер 6 записи и появляется на верхнем входе элемента И 7. На шестом такте активизируется шестая горизонтальная шина 25 и под действием единичных команд С, С и С происходит подача результата вычисления функции (а + а,) из нижнего элемента 12 памяти на нижний вход элемента И 7,
Результат вычисления функции (а.,+а„)-а записывайся в среднюю ячейку элемента 1 7 памяти выходного блока 15, Если этот результат равен 1, то через время t включается средний механизм 20.
14
Как видно из приведенного примера, включение элементов 13 и 18 задержки в соответствующие блоки позволило вычислять логические функции с временными задержками, что невозможно было сделать в известном устройстве.
Изобретение в отличие от известного устройства позволяет расширить
область его применения для автоматизации технологических процессов,-охватив большую область тех из них. Которые требуют временных задержек при включении электроприводов.
Формула изобретения
Устройство для дистанционного программного управления электроприводными механизмами, содержащее входной блок, блок задания программ,
вычислительньш блок, соединенный выходом с входами выходного блока, блока оперативной памяти, содержащего два параллельно подключенных канала, каждый из которых состоит из первых
элементов памяти и элементов считывания, первые входы первых элементов памяти подключены к входу блока оперативной памяти, вторые входы первых элементов памяти и первые входы эле-
ментов считывания соединены с соответствующими командными шинами блока задания программы, отличающееся тем, что, с целью расширения области использования устройства за
счет обработки логических функций с временными задержками, выходной блок содержит дешифратор, элементы памяти, первые элементы задержки и элементы усиления и преобразования,
а в блок оперативной памяти введены вторые элементы задержки, входы которых соединены с выходами первых элементов памяти, выходы вторых эле- ментов задержки подключены к вторым
входам элементов считывания блока оперативной памяти, первые входы вторых элементов памяти соединены с входом выходного блока, вторые входы вторых элементов памяти подключены
к выходам дешифратора, выходы вторых элементов памяти через первые элементы задержки соединены с входами элементов усиления и преобразованияj выходы которых являются выходами выходного блока.
21
Cjk C2l(
щ ш т 28
21
23
Редактор А.Ворович
Составитель А.Исправкикова
Техред М.Ходаннч Корректор Л.Патай
Заказ 2509/41Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная 4
28 т т 28 т ш
Изобретение относится к системам автоматики и может быть использовано в автоматизированных системах управления машинами,-механизмами и поточными линиями и т.д. Целью изобретения является расширение области использования устройства за счет обработки логических функций с временными задержками. Устройство содержит входной блок, вычислительный блок, блок оперативной памяти, выходной блок, блок задания программы В блок оперативной памяти и в выходной блок введены элементы задержки, позволяющие задерживать на необходимое время информационные сигналы для реализации переключатель функции, содержащей аргументы с временными зависимостями. При измейении алгоритма работы механизмов требуется переналадить только один программный блок, 1 ил. i (Л со 00. со со
| Устройство для дистанционного программного управления электроприводными механизмами | 1982 |
|
SU1071999A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
