Изобретение относится к элементам нол ьемно-транснортных и роботизированных систем, предназначенных для отделения,зах- вата и 11оследуюи 1его переноса плоских гибких деталей типа тканей, кожи, пленок, и т. п., и может найти применение на нреднриятиях н вейной, обувной и трикотажной п ро м ы Hj ле н ност и.
Целью изобретения является повышение надежности работы устройства.
На фиг. 1 представлено устройство, общий вид; на фиг. 2 (а, б, в) - отделение и захват детали.
Устройство для захвата и отделения гибких листовых деталей от стопы включает в себя держатель стопы в виде наклонной нлиты 1, вертикальную стойку-2 с горизонтальной направляющей 3 для корпуса 4. Корпус 4 смонтирован с возможностью возвратно-ност унательного нереме- в вертикальной плоскости от силового цилиндра 5. На корпусе 4 расположено средство для захвата и отвода деталей от стопы, включающее пару эксцентрично установленных роликов 6 с мягким покрытием, например резиповым. Ролики 6 снабжены приводом для их вращения навстречу друг другу, имеющим щестер- ни 7, расноложенные на осях роликов, траверсу 8, смонтированную носредством направляющих 9 в корпусе 4 и рейки 10 для контакта с нлестерней 7 соответствующего ролика 6. При этом траверса 8 ноанружинена к корпусу 4 пружиной 11.
Устройство работает следующим образом.
Наклонная нлита 1 подводится под стопу 12 (фиг. 2а) так, чтобы ролики 6 находились над стопой. При опускании силового цилиндра 5 корпус 4 опускается по стойке 2 вниз. Ролики 6 упираются в стоиу 12 (фиг. 26) и при дальнейшем перемещении корпуса 4 вниз зубчатые рейки 10, взаимодействуя с щестернями 7, поворачивают ролики 6 навстречу друг другу.
При этом из-за большого коэффициента трения резиновые ролики 6 участки верхнего слоя стопы 12 сдвигают навстречу друг другу, образуя из него петлю, которая сжимается и затягивается между роликами 6. Траверсе 8, сжимая пружину 1 1, поднимается вдоль направляющих 9. При повороте эксцентричных роликов 6 их максимальные радиусы сближаются (линии а-а., нроходящие через геометрический
центр и центр вращения роликов 6, сближаются), затем переходят через «мертвое положение, сжимая резину роликов 6, и фиксируют отделяемую деталь и средство для захвата и отвода в стабильном положении. Затем корпус 4 поднимается вверх (фиг. 2в). Удаление детали из устройства может осуществляться путем ее выдергивания. При этом ролики 6 перескакивают через «мертвое положение их максимальных радиусов, опускаются под действием
5 пружины 11 вниз, поворачиваются через реечную иару в обратном направлении и высвобождают захваченную деталь. Величина опускания роликов 6 относительно корпуса 4 регулируется гайками 13 в зависимости от поверхностных свойств отделяе0 мых деталей.
Повыщение надежности захвата достигается за счет выполнения роликов эксцентричными, что обеспечивает устойчивую фиксацию отделяемой детали в захваченной
г позиции, так как эксцентрики при захвате перескакивают через «мертвое положение.
Формула изобретения
Q Устройство для захвата и отделения гибких листовых деталей от стопы, содержащее установленное в подвижном корпусе средство для захвата и отвода деталей, имеющее пару роликов с мягким покрытием и привод для их вращения навст5 речу друг другу, отличающееся тем, что, с целью повьииения надежности работы ст- ройства, ролики смонтированы на осях эксцентрично, а привод вращения роликов навстречу друг другу содержит шестерни, смонтированные на осях роликов, и нод- нружиненную траверсу, на которой установлены оси роликов, при этом корпус снабжен направляющими для установки тра- версь и имеет зубчатые рейки для контакта с п естерней соответствующего ролика.
0
Редактор М. Бандура Заказ 2571/19
Составитель Г. Шувалов
Те.хред И. ВерееКорректор .Л. Зимокосов
Тираж 590Подписное
ВИПИПИ Государственного комитета СССР но делим изобретений и открытий
1 13035, Москва, Ж- 35, Раун1ская наб.. д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4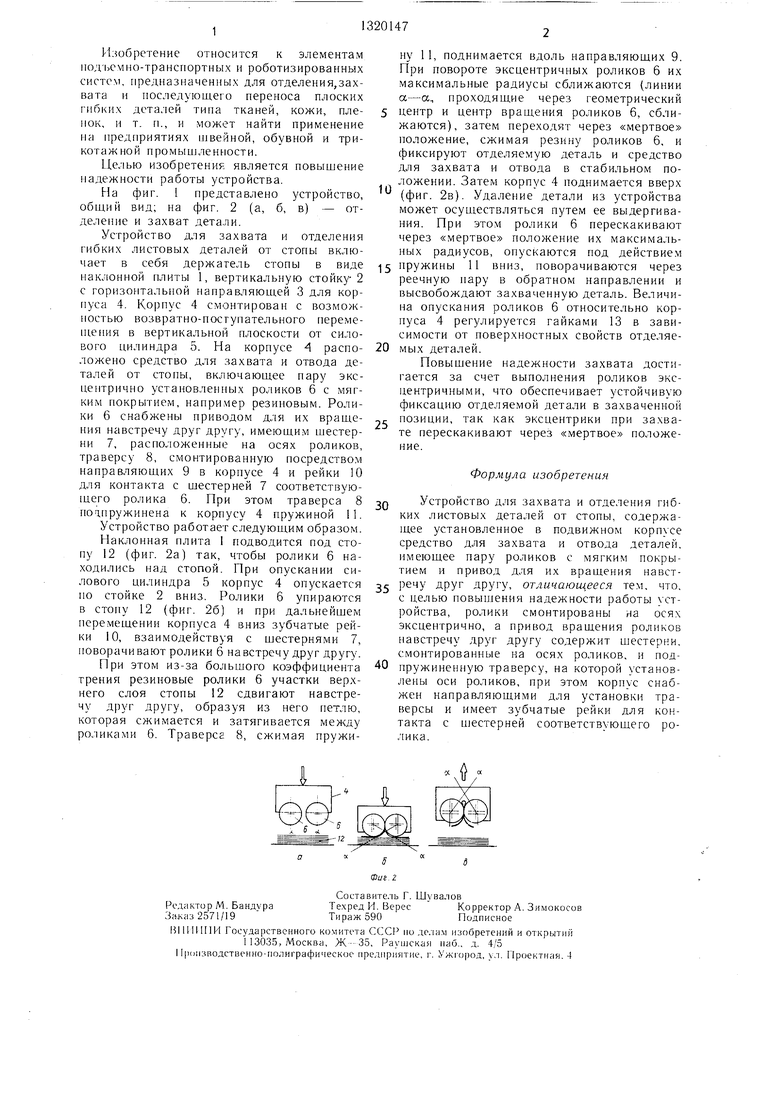
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучного отделения гибких листовых деталей от стопы | 1989 |
|
SU1719290A1 |
| Устройство для захвата гибких листовых материалов | 1988 |
|
SU1611822A1 |
| Устройство для отделения гибких листовых деталей от стопы | 1987 |
|
SU1493575A1 |
| УСТРОЙСТВО для ОТДЕЛЕНИЯ ЛИСТОВЫХЗАГОТОВОК от стопы | 1969 |
|
SU250103A1 |
| Устройство для отделения листа от стопы и подачи его к обрабатывающей машине | 1973 |
|
SU476919A1 |
| МЕХАНИЗМ ШАГОВОЙ ПОДАЧИ ЛИСТОВЫХ ЗАГОТОВОК В РАБОЧУЮ ЗОНУ ПРЕССА | 1991 |
|
RU2011539C1 |
| Устройство для захвата и подачи в рабочую зону деталей швейных изделий | 1988 |
|
SU1640085A1 |
| Захватное устройство | 1989 |
|
SU1717511A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| Устройство для отделения листового материала от пачки | 1986 |
|
SU1392014A1 |
Изобретение относится к элементам подъемно-транспортных и роботизированных систем, в частности к устройствам для захвата и отделения гибких листовых деталей от стоны. Цель изобретения - повышение надежности работы устройства. Устройство включает в себя смонтированный на стойке 2 корпус 4 с возможностью возвратно-поступательного иеремещення от силового цилиндра 5. На корпусе размещено средство для захвата и отвода деталей от стопы, имеющее пару эксцентрично устаповлен Ц11х роликов 6 с inecTep- ня.ми 7, траверс;, 8. смонтированную в корпусе посредством направляющих 9 и рейки 10. Для захвата и отделения детали корпус 4 опускают на стону до упора роликов 6. При дальнейшем перемещении ко|1- пуса роликг. поворачиваются наБстро-iy друг другу, сдвигая при этом участк верхнего слоя стопы, образуя из него петлю, которая сжимается и затягивается между роликами 6. За счет выполнения роликов эксцентричными и перехода их через «мертвое положение обеспечивается устойчивая фиксация отделяемой детали в захваченной позиции. 2 ил. S 0) -J оэ tsD О 4 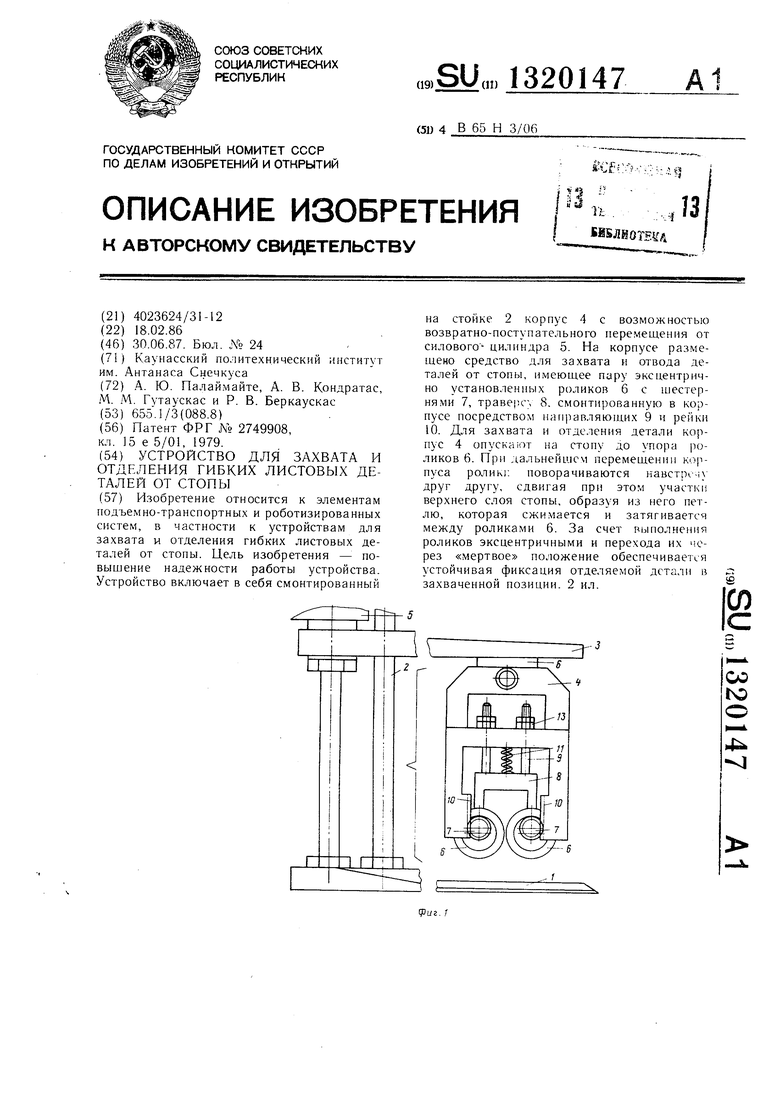
| Ступенчатая космическая ракета | 2020 |
|
RU2749908C1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
