Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для отделения и последующего переноса плоских мягких деталей, трикотажных полотен, нетканных материалов и т.п. и может найти применение на предприятиях швейной, обувной и трикотажной промышленности.
Устройство относится к классу отделителей роликового типа, образующих складки на отделяемых деталях.
Известно устройство для отделения деталей от стопы, содержащее два ролика с обгонными муфтами, покрытыми эластичным материалом с высоким коэффициентом трения, закрепленных посредством серы на держателе.
Недостатком данного устройства является то, что при отделении верхней детали стопы создается значительное давление на нее и невозможно отделение ворсистых деталей/склонных к сцеплению между собой.
-Также известно устройство для отделения верхней детали из гибкого листового материала от стопы, содержащее корпус, толкатель, возвратную пружину, систему рычагов и два захватных элемента криволинейного профиля с шероховатой рабочей поверхностью.
Однако при отделении верхней детали от стопы нужно создать значительное давление на нее и необходим специальный привод для срабатывания этого устройства.
Цель изобретения - расширение технологических возможностей устройства и повышение надежности отделения одной верхней детали стопы.
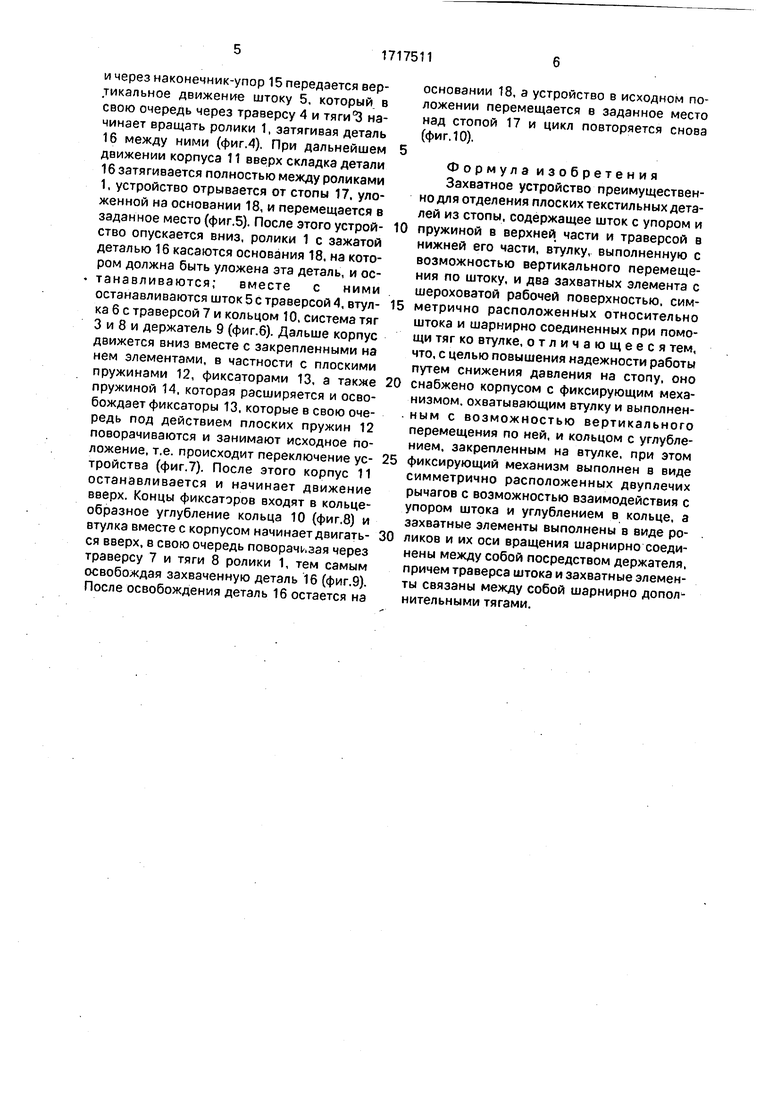
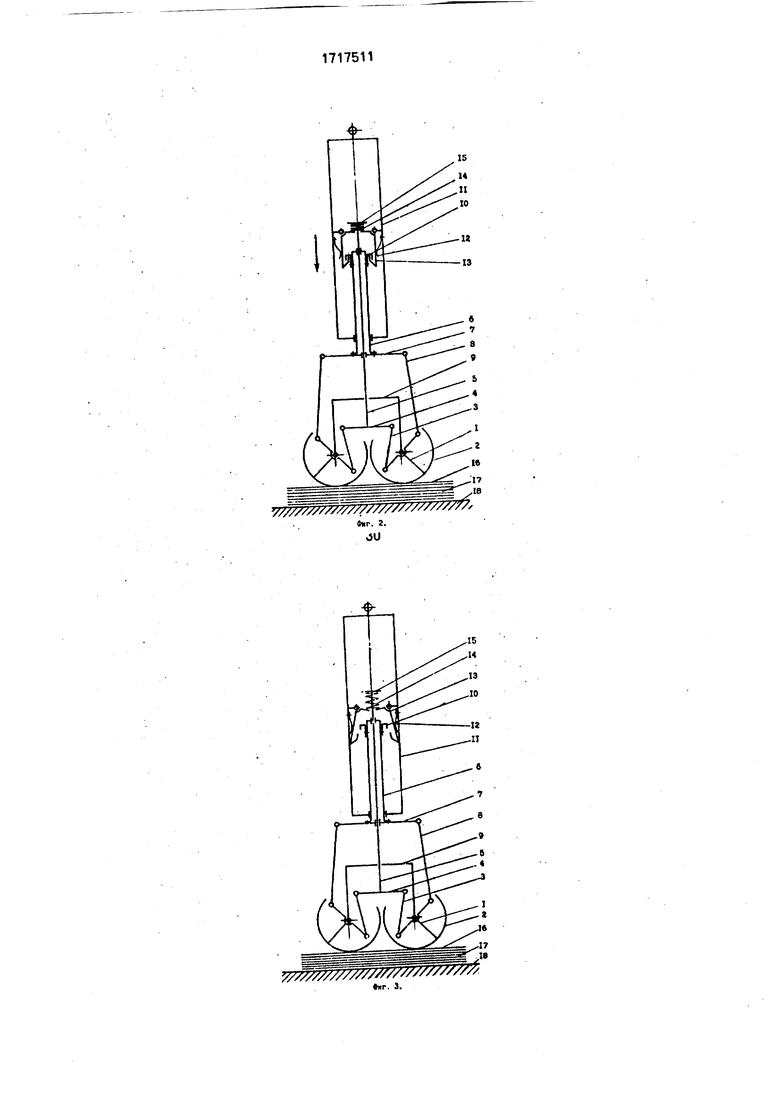
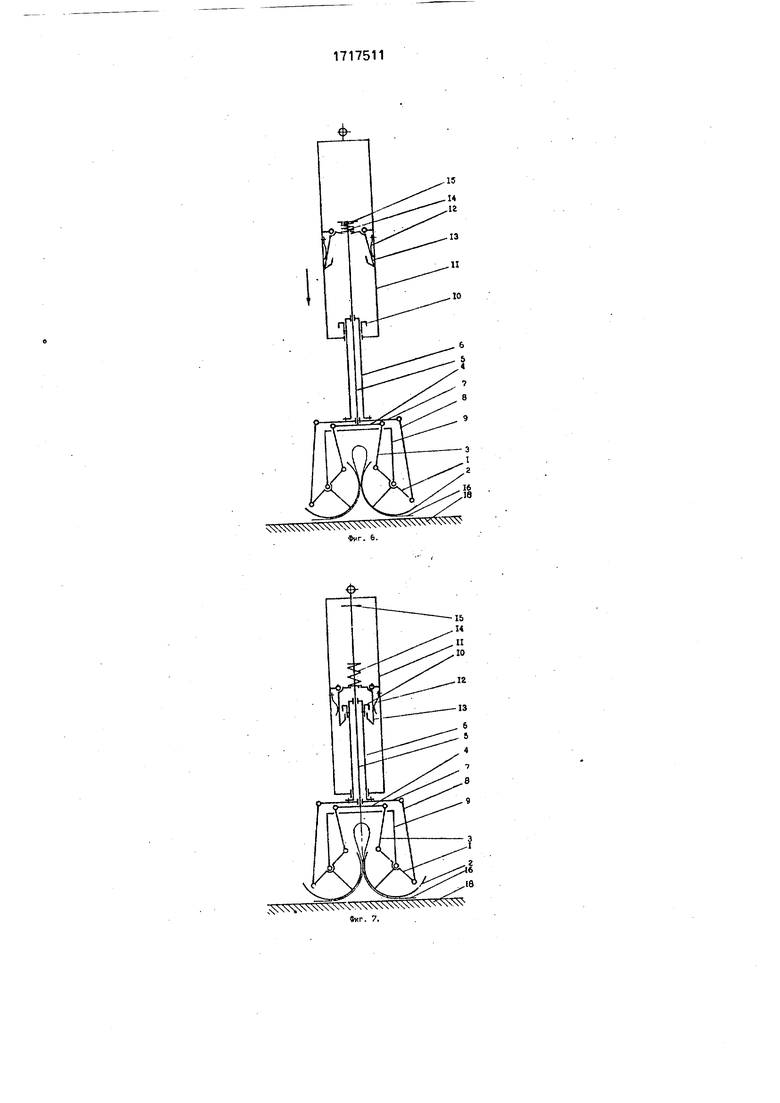
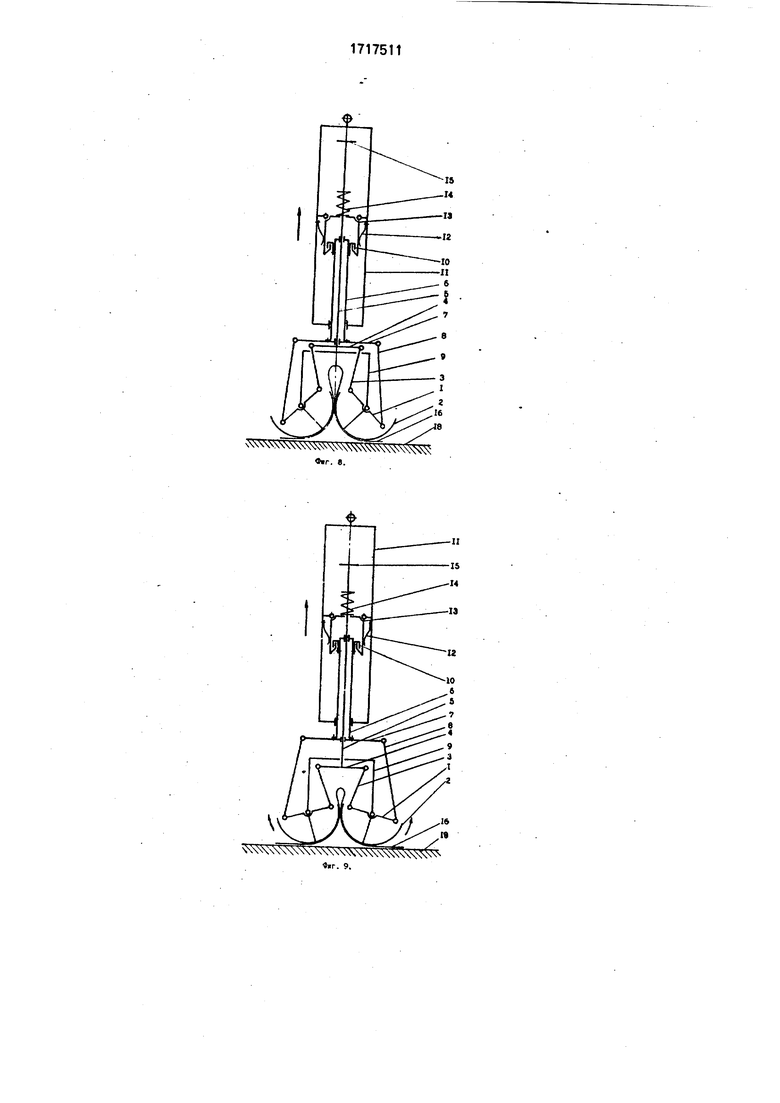
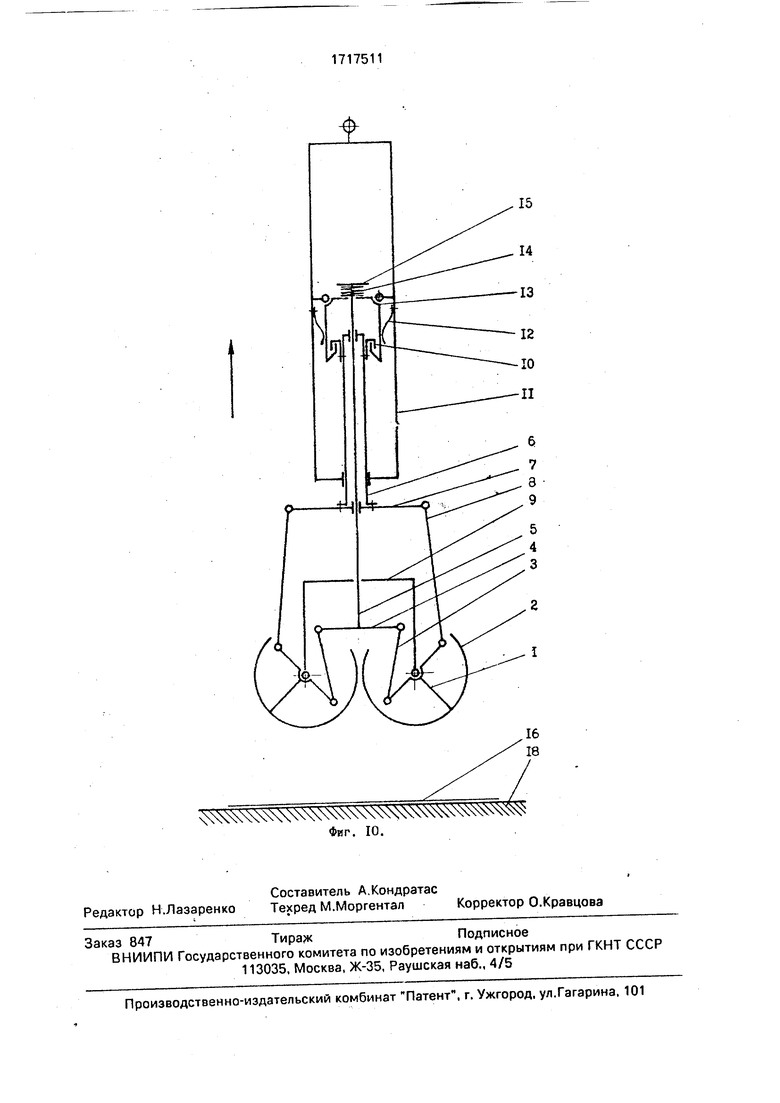
На фиг,1 представлена кинематическая схема захватного устройства в момент его приближения к стопе; на фиг.2 - кинематическая схема захватного устройства в момент его касания стопы; на фиг.З - кинематическая схема захватного устройства в момент его переключения; на фиг.4 - кинематическая схема захватного устройства в момент захвата им верхней детали сто- пы; на фиг.5 - кинематическая схема захватного устройства в момент переноса VIM детали; на фиг.6 - кинематическая схема захватного устройства в момент касания основания, на котором должна быть уложена деталь; на фиг.7 - кинематическая схема захватного устройства в момент его переключения; на фиг.8 - кинематическая схема захватного устройства в момент начала освобождения им детали; на фиг.9 - кинематическая схема захватного устройства в момент освобождения им детали; на фиг.10
-кинематическая схема захватного устройства в момент его отделения от места укладки детали.
Захватное устройство для текстильных деталей содержит два захватных элемента в
виде роликов 1 с шероховатой рабочей поверхностью 2, посредством тяг 3 шарнирно соединенных с траверсой 4, закрепленной на нижней части штока 5, проходящего через втулку 6, на нижней части которого за0 креплена траверса 7, посредством тяг 8 шарнирно соединена с теми же захватными элементами, центры вращения которых соединены между собой посредством держателя 9, причем на втулке установлен
5 переключающий механизм, состоящий из кольца 10, закрепленного на верхней части втулки и имеющего кольцеобразное углубление с нижней стороны корпуса 11, надетого на среднюю часть втулки с
0 закрепленными в нем плоскими пружинами
12и шарнирно установленными фиксаторами, выполненными в виде двуплечих рычагов 13, на которые сверху опирается пружина 14, надетая на верхнюю выступаю5 щую из втулки часть штока с закрепленным на его верхнем конце наконечником-упором 15.
Для работы устройство фиксируется за корпус 11 в вертикальном положении в схва0 те промышленного манипулятора (не показан) или подвешивается на гибкой тяге за петлю, расположенную на верхней части этого корпуса.
В исходном положении шток 5 находит5 ся в нижнем положении по отношению к втулке 6. Нижние концы фиксаторов 13 находятся в кольцеобразной выемке кольца 10, пружина 14 сжата между фиксаторами
13и наконечником-упором 15 (фиг.1).
0 Устройство работает следующим образом.
При опускании корпуса 11 устройства в контакт с верхней деталью 16 стопы 17 входят шероховатые поверхности 2 роликов 1 и
5 они останавливаются; вместе с ними останавливаются шток 5 с траверсой 4, втулка б с траверсой 7 и кольцом 10, система тяг 3 и 8 и держатель 9 (фиг.2). Дальше корпус 11 движется вниз вместе с закрепленными на
0 нем элементами, в частности с плоскими пружинами 12 и фиксаторами 13, тем самым освобождая фиксаторы 13, их нижние концы выходят из кольцеобразного углубления кольца 10 и они под действием пружины 14
5 поворачиваются и деформируют плоские пружины 12 (фиг.З), т.е. происходит переключение устройства. После этого корпус останавливается и начинает движение вверх. При движении корпуса 11 вверх сначала фиксаторами 13 сжимается пружина 14
и через наконечник-упор 15 передается вертикальное движение штоку 5, который в свою очередь через траверсу 4 и тяги З начинает вращать ролики 1, затягивая деталь 16 между ними (фиг.4). При дальнейшем движении корпуса 11 вверх складка детали 16 затягивается полностью между роликами 1, устройство отрывается от стопы 17, уложенной на основании 18, и перемещается в заданное место (фиг.5). После этого устройство опускается вниз, ролики 1 с зажатой деталью 16 касаются основания 18. на котором должна быть уложена эта деталь, и ос- танавливаются; вместе с ними останавливаются шток 5 с траверсой 4, втулка 6 с траверсой 7 и кольцом 10, система тяг 3 и 8 и держатель 9 (фиг.6). Дальше корпус движется вниз вместе с закрепленными на нем элементами, в частности с плоскими пружинами 12, фиксаторами 13, а также пружиной 14. которая расширяется и освобождает фиксаторы 13. которые в свою очередь под действием плоских пружин 12 поворачиваются и занимают исходное положение, т.е. происходит переключение устройства (фиг.7). После этого корпус 11 останавливается и начинает движение вверх. Концы фиксаторов входят в кольцеобразное углубление кольца 10 (фиг.8) и втулка вместе с корпусом начинает двигаться вверх, в свою очередь поворачивая через траверсу 7 и тяги 8 ролики 1, тем самым освобождая захваченную деталь 16 (фиг.9). После освобождения деталь 16 остается на
основании 18, а устройство в исходном положении перемещается в заданное место над стопой 17 и цикл повторяется снова (фиг. 10).
Формула изобретения Захватное устройство преимущественно для отделения плоских текстильных деталей из стопы, содержащее шток с упором и
пружиной в верхней части и траверсой в нижней его части, втулку, выполненную с возможностью вертикального перемещения по штоку, и два захватных элемента с шероховатой рабочей поверхностью, симметрично расположенных относительно штока и шарнирно соединенных при помощи тяг ко втулке, отличающееся тем, что, с целью повышения надежности работы путем снижения давления на стопу, оно
снабжено корпусом с фиксирующим механизмом, охватывающим втулку и выполнен- ным с возможностью вертикального перемещения по ней, и кольцом с углублением, закрепленным на втулке, при этом
фиксирующий механизм выполнен в виде симметрично расположенных двуплечих рычагов с возможностью взаимодействия с упором штока и углублением в кольце, а захватные элементы выполнены в виде роликов и их оси вращения шарнирно соединены между собой посредством держателя, причем траверса штока и захватные элементы связаны между собой шарнирно дополнительными тягами.
Y///////////7/7/7///7///7/,
««г. г. М
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для отделения текстильных изделий от стопы | 1989 |
|
SU1719291A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Полуавтомат для лужения деталей | 1984 |
|
SU1194617A1 |
| Устройство для захвата мягких деталей | 1989 |
|
SU1742189A1 |
| Захватное устройство | 1989 |
|
SU1726242A1 |
| Устройство для отделения из стопы деталей с плоской и криволинейной поверхностью | 1982 |
|
SU1052458A1 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ | 1992 |
|
RU2042490C1 |
| Устройство для отделения деталей от пачки | 1989 |
|
SU1671590A1 |
Изобретение относится к обувной и трикотажной промышленности для отделения из стопы и последующего переноса плоских текстильных деталей. Сущность изобретения: захватное устройство содержит два за- хватных элемента в виде ролика 1 с шероховатой рабочей поверхностью. Ролики 1 с одной стороны шарнирно соединены 7SS///S777/7///////S///S//7/Sfs/ r/s посредством тяг 3 с траверсой 4 штока 5, проходящего через втулку 6, а с другой стороны - также шарнирно посредством тяг 8 с траверсой 7, прикрепленной к втулке 6. Центры роликов соединены между собой шарнирно посредством держателя 9 с обеспечением зазора между ними для затягивания складки детали при их вращении. Шток 5 в верхней части снабжен упором 15, а на втулке закреплено кольцо 10 с углублением. Втулку 6 охватывает корпус.11, выполненный с возможностью вертикального перемещения по ней. В корпусе закреплены фиксаторы в виде двуплечих рычагов 13. которые взаимодействуют с одной стороны с углублением кольца 10, а с другой стороны -через пружину 14 с упором 15 штока 5. При срабатывании фиксаторов в результате перемещения корпуса 11 происходит переключение устройства. 10 ил. Х| СП I S r/s Фиг.1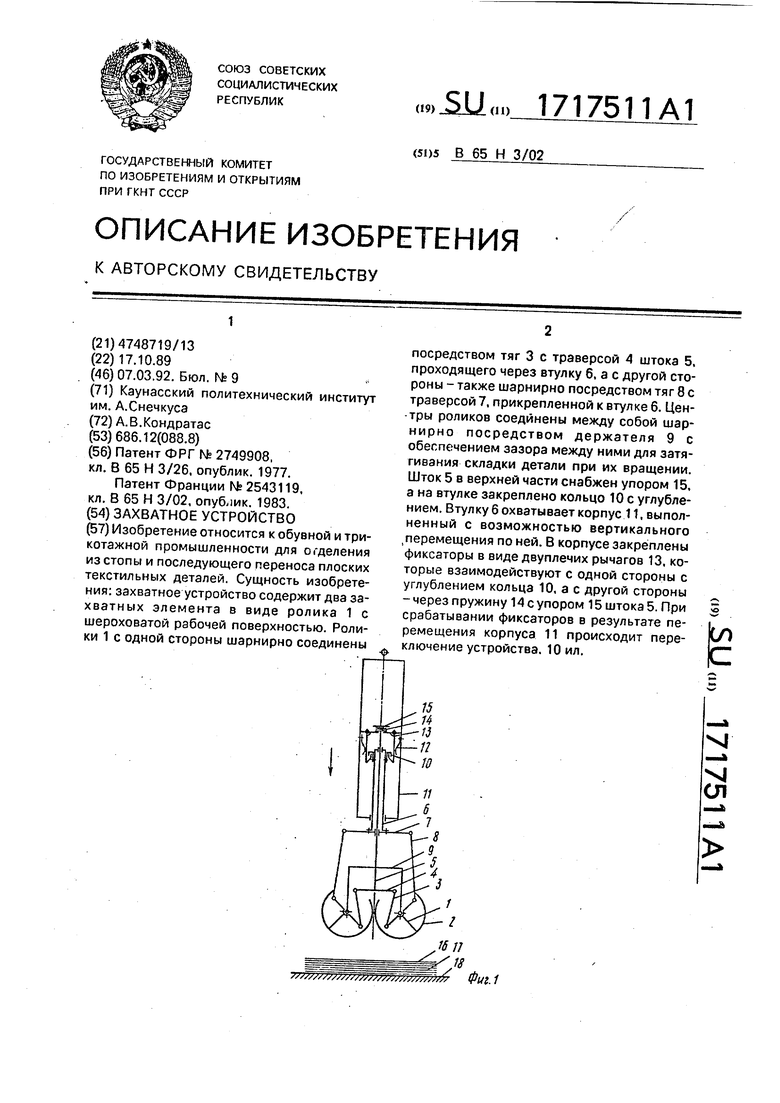
////////////////f//////////// /
SI
////////S//////////////////S//Jt,
IISLIU
Фиг. 6.
«кг. 7.
II
Фиг. 10.
| Ступенчатая космическая ракета | 2020 |
|
RU2749908C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| опублик | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| ВИБРОБЕЗОПАСНАЯ ПНЕВМАТИЧЕСКАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ С РАЗОМКНУТОЙ КИНЕМАТИКОЙ ФУНКЦИОНАЛЬНЫХ ЗВЕНЬЕВ | 2013 |
|
RU2543119C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
