Изобретение относится к системам управления транспортными средствами периодического действия и может быть использо вано в шахтных подъемных установках.
Цель изобретения - повышение надежности.
На чертеже приведена схема предлагаемого устройства.
Устройство форм 1рования путевых команд для управления шахтной подъемной установкой содержит барабан 1 подъемной машины, кинематически через редуктор 2 связанный валами 3 и 4, причем передаточные отношения между барабаном 1 и валами 3, 4 различны. Устройство содержит также бесконтактные датчики положения валов путевого датчика, воздействуюш,ие элементы которых 5-8 укреплены на валах 3 и 4. В качестве элементов 5-8 могут быть использованы рычаги, флажки, диски с отверстиями и т. п.
Для формирования каждой путевой команды используются два бесконтактных датчика, причем один из них выполнен с двумя чувствительными элементами 9, Шили 11, 12, взаимодействуюшими соответственно с элементами 5 и 7, а другие датчики содержат один чувствительный элемент (13, 14), взаимодействующий соответственно с элементами 6, 8. Выходы элементов 10, 13 и 12, 14 подключены соответственно к входам схем 15, 16 совпадения. Выходы элементов 9, 11 подключены соответственно к входам схем 17, 18 совпадения, другие входы которых подключены к выходам элементов 13, 14. Выходы схем 17, 18 связаны через усилители 19, 20 с информационными входами соответственно узлов 21, 22 памяти, сбросовые входы которых связаны через усилители 23, 24 с выходами схем 15, 16.
Узлы 21, 22 памяти могут быть выполнены в виде двухобмоточных реле, содер- жаших соответственно обмотки 25, 26 установки, обмотки 27, 28 сброса и замыкающие контакты 29, 30.
Устройство работает следуюпл,им образом. При вращении барабана 1 подъемной ма- щины через редуктор 2 приводятся во вращение валы 3 и 4 и закрепленные на них элементы 5-8. На каждом обороте вала 3 или 4 в момент прохождения элементов 5, 7 или 6, 8, 9-12 или 13, 14 происходит возбуждение соответственно элементов или 13, 14.
Сигналы на выходах схем 17, 18 совпадения формируются только при условии одновременной подачи сигналов соответственно с выходов чувствительных элементов 9, 13 или 11, 14. Аналогично формируются сиг- палы на выходах схем 15, 16 совпадения при одновременной подаче сигналов соответственно с выходов чувствительных элементов 10, 13 или 12, 14. Совпадение во времени сигналов элементов 9, 13 и 11, 14 происходит только один раз за цикл подъема, а совпадение сигналов элементов 10, 13 и 12, 14 - один раз за цикл спуска, благодаря разным угловь м скоростям валов 3, 4. При совпадении во времени сигналов элементов 9, 13 или 11, 14 открывается схема 17 или 18 совпадения, благодаря чему на информационный вход узла 21 или 22 .памяти поступает сигнал, в результате чего замыкаются контакты 29, 30 при движении подъемной установки вперед, при движении- сосуда назад происходит размыкание контактов 29, 30, в результате - поступление сигнала на сбросовый вход узла 21 или 22. Указанное попарное возбуждение элементов при движении вперед и назад проис5 ходит при условии, что длительность воздействия элементов 6 или 8 на элементы 13 или 14 должна быть равна суммарному времени воздействия элементов 5 или 7 соответ- стенно на элементы 9, 10 или 11, 12, расположенных в одной плоскости под неболь0 ншм углом друг от друга. Так как элементы 5 или 7 в моменты срабатывания узла 21 или 22 воздействуют на оба элемента 9, 10 или 11, 12 поочередно, то узлы 21 или 22 запоминают воздействие на последний из паг ры элементов 9, 10 или 11, 12, что и является ключом для распознавания направления движения подъемной установки.
Для того, чтобы настроить соответствующие пары элементов на выдачу путевой коQ манды в данной точке ствола, необходимо поставить подъемную установку в указанную точку, зафиксировать детали 5 и 6 на валах 3, 4 в положении, когда возбуждаются соответствующие пары элементов 9, 10 и 13 при движении вперед и назад. При
каждом прохождении точки ствола, на которую произведена настройка, будет включаться узел 21 при движении вперед и выключаться при движении назад.
Аналогичным образом образуются команды при прохождении подъемной установкой
0 любой другой точки ствола, для которой будет соответствующая пара бесконтактных датчиков.
Фор.щла изобретения
Устройство формирования путевых команд для управления шахтной подъемной установкой по авт. св. № 1197967, отличающееся тем, что, с целью повышения надежности, один из бесконтактных датчиков положения вала путевого датчика выполнен с дополнительным чувствительным элементом, выход которого подключен к одному из входов одной схемы совпадения, другой вход которой подключен к выходу чувствительного элемента другого бесконтактного датчика положения вала, а выход схемы совпадения связан с информационным входом узла памяти, сбросовый вход которого связан с выходом другой схемы совпадения.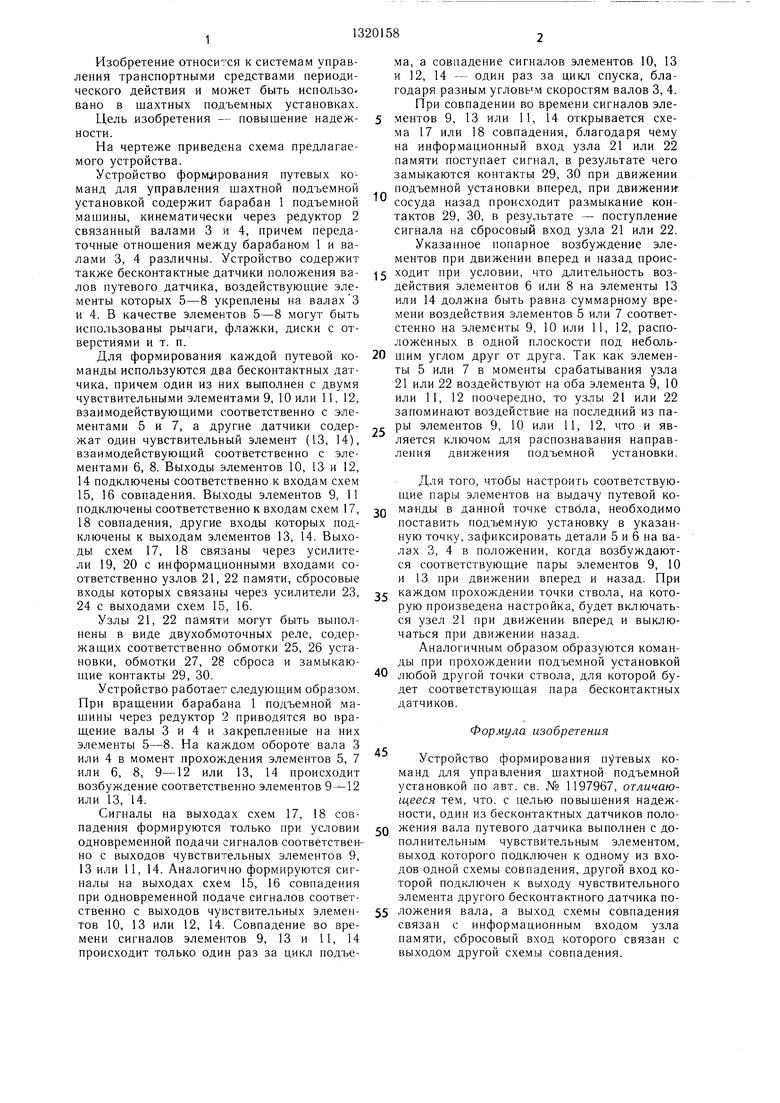
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования путевых команд для управления шахтной подъемной установки | 1982 |
|
SU1197967A1 |
| Устройство для формирования зашитной тахограммы органичителя скорости шахтной подъемной машины | 1984 |
|
SU1240715A1 |
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
| Устройство для защиты шахтной подъемной установки от напуска подъемных и перегрузки направляющих канатов | 1986 |
|
SU1416425A1 |
| Формирователь эталонной скоростидля уСТРОйСТВ зАщиТы шАХТНыХпОд'ЕМНыХ уСТАНОВОК | 1978 |
|
SU844533A1 |
| Способ защиты шахтной подъемной установки от превышения скорости подъема | 1990 |
|
SU1828841A1 |
| Устройство управления шахтной подъемной установкой | 1985 |
|
SU1331783A1 |
| Устройство для защиты шахтной подъемной установки при заклинивании подъемного сосуда в стволе | 1978 |
|
SU977348A2 |
| Устройство защиты от напуска каната при застревании подъемного сосуда в стволе | 1978 |
|
SU948825A1 |
| Устройство для определения положения подъемного сосуда в стволе шахты | 1985 |
|
SU1414746A1 |
Изобретение относится к системам управления транспортными средствами периодического действия, в частности шахтными подъемными установками. Цель изобретения - повышение надежности. Устройство содержит барабан 1 подъемной машины, кинематически через редуктор 2 связанный с валами 3 и 4, причем передаточные отношения между барабаном 1 и валами 3 и 4 различны. На валах закреплены воздейст- вуюш.ие элементы 5-8 бесконтактных датчиков положения валов 3 и 4, взаимодей- ствуюш.ие соответственно с чувствительными элементами 9-14. Для формирования одной путевой команды необходимо два бесконтактных датчика. За счет выполнения одного из датчиков с двумя чувствительными элементами 9, 10 или 11, 12 и соединения выходов чувствительных элементов 9-14 с соот- ветствуюпдими входами схем 15-18совпад ния устройство формирует команды при про хождении подъемной установкой определенной точки ствола, при этом при движении вперед замыкаются контакты 29 и 30, которые при движении назад размыкаются. 1 ил. о сл со ю ел оо N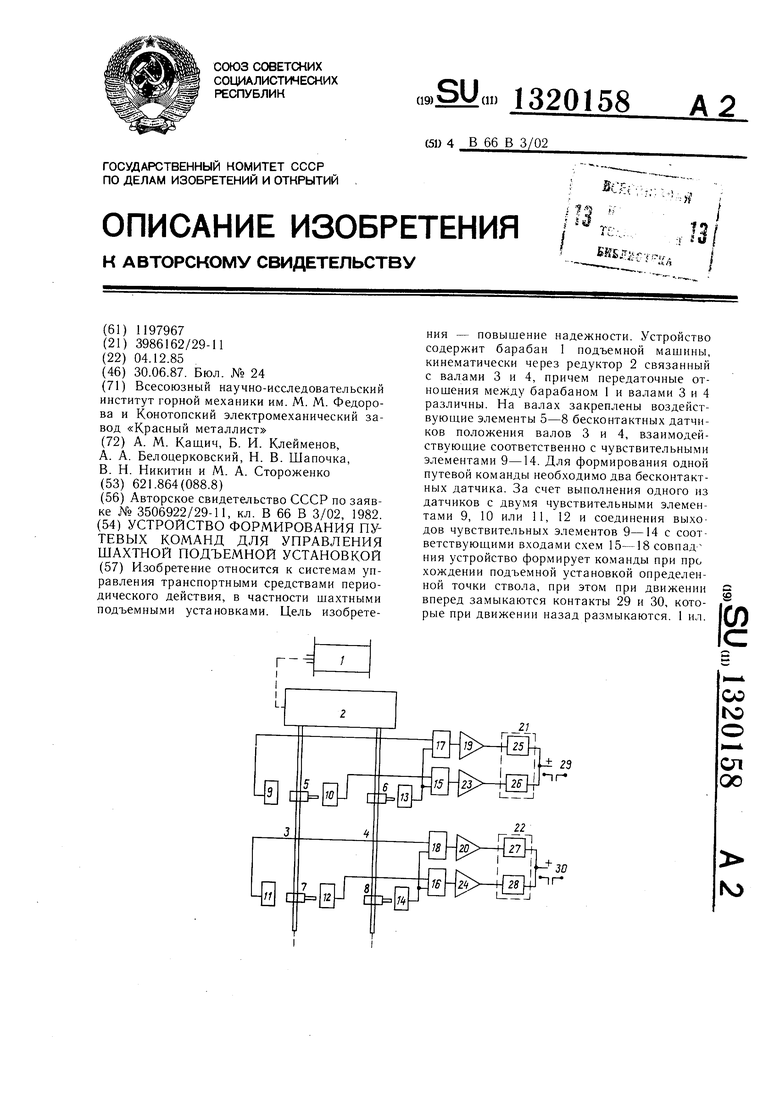
| Авторское свидетельство СССР по заявке № 3506922/29-11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
