Изобретение относится к горной промышленности, в частности к шахтным манипуляторам, предназначенным для механизации ручных трудоемких работ, преимущественно при проведении горных вырабо- г ток.
Целью изобретения является обеспечение автономного передвижения манипулятора по монорельсу.
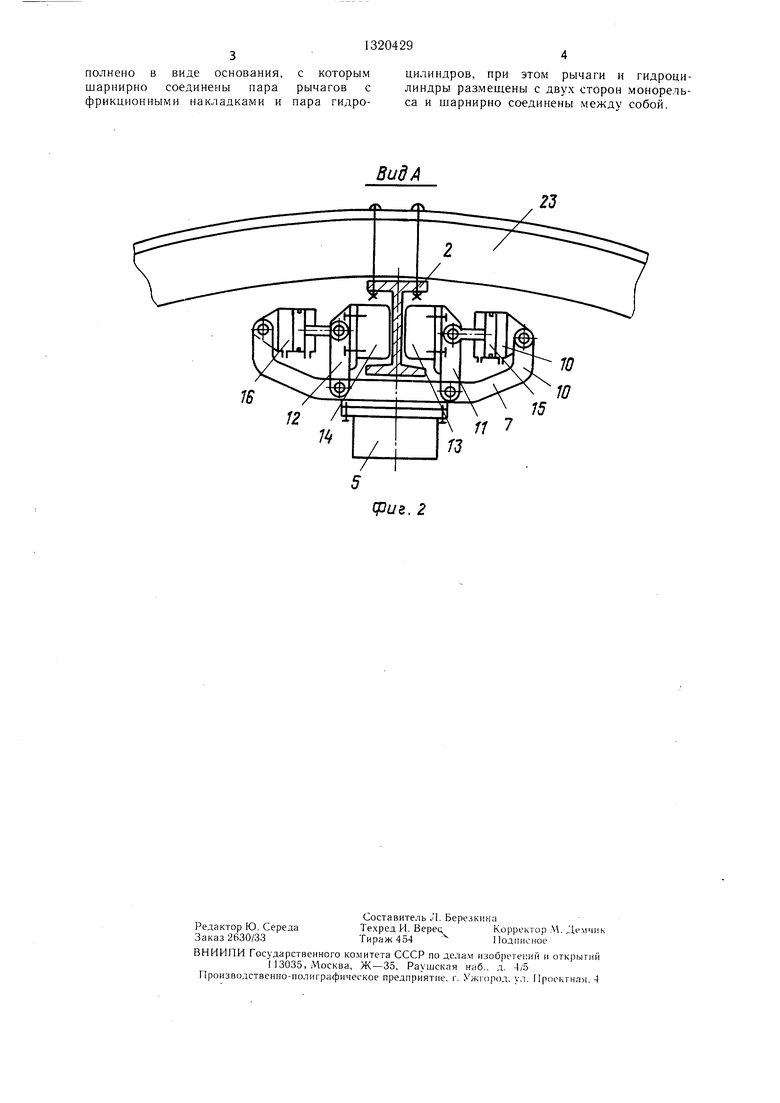
На фиг. схематически изображен шахтный манипулятор; на фиг. 2 - вид 0 А на фиг. 1.
Подвесной шахтный манипулятор состоит из транспортной платформы I, подвешенной к монорельсу 2 посредством кареток 3. Транспортная платформа перемешается по монорельсу механизмом передвижения, выполненным в виде раздвижной балки, состояшей из двух частей, каждая из которых имеет на концах опоры 4 и 5.
цилиндров 15 и 16, поворачивая рычаги 11 и 12, прижимают фрикционные накладки 13 и 14 к .монорельсу 2, за счет чего опору 5 затормажимают относительно указанного монорельса. Затем рабочую жидкость под давлением подают в поршневую полость гидроцилиндра 6 (при этом тормозное устройство 9 выключено, т. е. не затормаживает опору 4 относительно монорельса), вследствие чего его шток, выдвигаясь, перемешает на заданный шаг одну из составных частей балки с транспортной платформой 1. Вслед за этим эту часть балки посредством тор.мозн ого устройства 9 затормаживают относительно монорельса 2. 15 После этого растормаживают (посредство.м выключения тормозного дополнительного устройства 10) опору 5 относительно монорельса 2. Для этого в штоковые полости гидроцилиндров 15 и 16 подают рабочую
л ivv tvyiy LJ1 .л . itti j vyitLj,C4/v ij iJi i ii i.,
Одна часть балки закреплена на платфор- 20 ° давлением (при этом поршме и имеет внутри продольные направляю- iiojio r гидроцилиндров подключешие, в которь,х размешена другая часть рабочую жидкость чебалки и которые служат для перемещенияР дроссель-регулятор 26 подают под
, давлением в штоковую полость силового
составных частей балки относительно другс
гт гидроцилиндра 6, шток которого, выдвидруга. Перемешение составных частей бал-
25гаясь, перемешает за собой опору 5. На
ки осушествляется силовым гидроцилинд- ро.м 6, шарнирно закрепленным с опорами 4 и 5 балки.
На опорах 4 и 5 закреплены основаниями 7 и 8 тормозные устройства 9 и дополнительное 10, выполненные в виде ЗО двух рычагов 1 и 12 с фрикционными накладками 13 и 14, шарнирно соединенных с основанием 7 и 8 и штоками гидроцилиндров 15 и 16, корпуса которых также соединены шарнирно с основанием.
На транспортной платформе 1 закреп- 35 лен механизм подъема, включающий поворотное устройство 17 с рычаго.м 18, приводом-гидроцилиндром 19 и антропоморфным манипулятором 20. На поворотном устройстве 17 закреплен шарнирный рычаг 21 с передающим устройством 22 стереотелевизионной установки, приемное устперемещает за собой опору этом цикл по передвижке на один шаг подвесного шахтного манипулятора заканчивают. Для последуюшего передвижения устройства необходимо описанный цикл повторить. Указанный цикл повторяется до тех пор, пока подвесной шахтный манипулятор не доставит верхняк 23 в зону установки арочной крепи.
Формула изобретения
роиство которой находится равления.
Кроме того на
следующие обозначения: нерхняк 23 арочной крепи 24, штрек 25, дроссель-регулятор 26.
Подвесной шахтный манипулятор работает следующим образом.
1. Подвесной шахтный манипулятор, включающий транспортную платформу, подвешенную к монорельсу посредством каре ток, механизм передвижения, связанный с силовым гидроцилиндром, механизм подъема и тормозное устройство, отличающийся тем, что, с целью обеспечения автономного передвижения манипулятора по монорельсу, механизм передвижения выполнен в виде чертежах приведены 45 составной раздвижной балки с опорами на
на пульте упконцах, при этом одна часть балки закреплена на транспортной платформе и имеет внутренние продольные направляющие для перемещения раздвижных частей балки друг относительно друга, а силовой гидроцилиндр
Оператор управляет антропоморфным установлен внутри балки между ее опора- манипулятором 20 и осуществляет захват ми и закреплен на опорах шарнирпо, придополнительноетормозные устпоследпим в зоне складирования верхня- ка 23 арочной крепи. Затем указанным ма- нипуляторо.м верхняк 23 поднимают на транспортную высоту, после чего рабочую жид- 55 ° балки, кость под давлением подают в пори невые полости гидроцилиндров 15 и 16 тормозного устройства 10. Г1ри этом штоки гидрочем манипулятор и.меет тормозное устройство, а ройства установлены на опорах раздвиж2. Манипулятор по п. 1, отличающийся тем, что каждое тормозное устройство вы
гаясь, перемешает за собой опору 5. На
перемещает за собой опору этом цикл по передвижке на один шаг подвесного шахтного манипулятора заканчивают. Для последуюшего передвижения устройства необходимо описанный цикл повторить. Указанный цикл повторяется до тех пор, пока подвесной шахтный манипулятор не доставит верхняк 23 в зону установки арочной крепи.
Формула изобретения
1. Подвесной шахтный манипулятор, включающий транспортную платформу, подвешенную к монорельсу посредством каре ток, механизм передвижения, связанный с силовым гидроцилиндром, механизм подъема и тормозное устройство, отличающийся тем, что, с целью обеспечения автономного передвижения манипулятора по монорельсу, механизм передвижения выполнен в виде составной раздвижной балки с опорами на
концах, при этом одна часть балки закреплена на транспортной платформе и имеет внутренние продольные направляющие для перемещения раздвижных частей балки друг относительно друга, а силовой гидроцилиндр
установлен внутри балки между ее опора- ми и закреплен на опорах шарнирпо, приустановлен внутри балки между ее опора- ми и закреплен на опорах шарнирпо, придополнительноетормозные устчем манипулятор и.меет тормозное устройство, а ройства установлены на опорах раздвиж ° балки,
2. Манипулятор по п. 1, отличающийся тем, что каждое тормозное устройство выполнено в виде основания, с которым шарнирно соединены пара рычагов с фрикционными накладками и пара гидроцилиндров, при этом рычаги и гилроци- линдры размещены с двух сторон монорельса и шарнирно соединены между собой.
Вид А
16
J2 Ifi
/
/5 Г ГГ 7
rj
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной шахтный манипулятор | 1988 |
|
SU1580019A1 |
| Подвесной шахтный манипулятор | 1986 |
|
SU1461977A1 |
| Шахтный самоходный манипулятор | 1987 |
|
SU1481422A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
Изобретение относится к горной пром- ти и обеспечивает автономное передвижение манипулятора по монорельсу. Манипулятор включает транспортную платформу 1, подвешенную посредством кареток 3 к монорельсу 2 с возможностью перемещения механизмом передвижения, связанным с силовым гидроцилиндром (ГЦ) 6. На платформе 1 закреплен механизм подъема. Механизм передвижения выполнен в виде /// /// /// /// /// /// /// /// /// составной раздвижной балки с опорами 4 и 5 на концах. Внутри балки между опорами 4 и 5 размещен и щарнирно закреплен на опорах 4 и 5 ГЦ 6. Одна часть балки закоеплена на платформе 1 и имеет внутренние продольные направляющие для перемещения раздвижных частей балки. На опорах 4 и 5 закреплены основаниями 7, 8тормозные устр-ва 9 и 10 (ТУ). С основаниями 7, 8 и арнирно соединена пара рычагов с фрикционными накладками и пара ГЦ. Рычаги и ГЦ размещены с двух сторон монорельса 2 и щарнирно соединены между собой. Рабочую жидкость подают в порщ- невую полость ГЦ 6. Шток монорельса 2 перемещает на Hjar одну из частей балки с платформой 1 и она затормаживается ТУ 9относительно монорельса 2. Затем посредством включения ТУ 10 растормаживают опору 5. Рабочая жидкость подается в штоковые полости ГЦ 6. Шток ГЦ выдвигается и переменшет опору 5. 1 з.п. ф-лы, 2 ил. ///////// /// /// /// /// /// /// /// е сл W/ ///////////////////// ////// /// /// /// /л / /// // /// . / со ю о 4 to 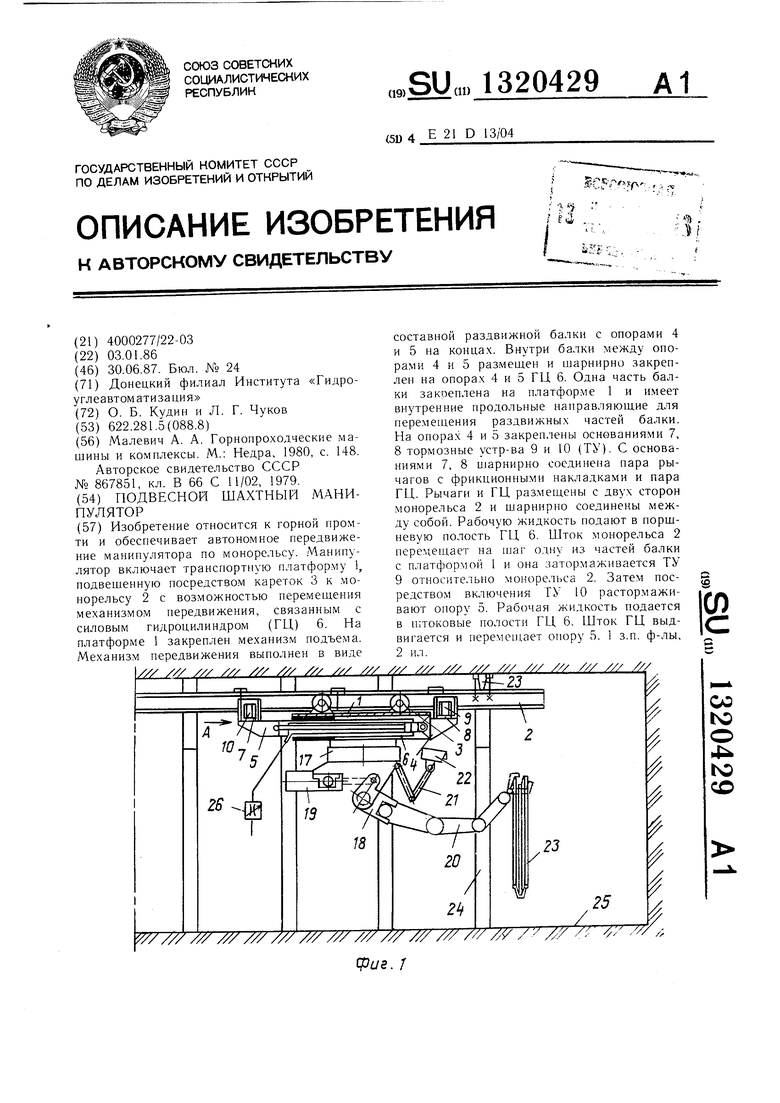
. Z
| Малевич А | |||
| А | |||
| Горнопроходческие машины и комплексы | |||
| М.: Недра, 1980, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Подвесной шахтный кран | 1979 |
|
SU867851A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
