2. Манипулятор по п.1, о т л и чающийся тем, что захват закреплен с возможностью наклона и поворота относительно продольной оси телескопического рычага.
3. Манипулятор по пп.1 и 2, о т личающ. ийся тем, что его основание закреплено на раме тележки с возможностью перемещения вдоль ее продольной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| Шахтный самоходный манипулятор | 1987 |
|
SU1481422A1 |
| Шахтный самоходный манипулятор | 1989 |
|
SU1724883A1 |
| Подвесной шахтный манипулятор | 1988 |
|
SU1580019A1 |
| Подвесной шахтный манипулятор | 1986 |
|
SU1461977A1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| Шахтный самоходный манипулятор | 1983 |
|
SU1204739A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| Способ крепления горных выработок арочной крепью и комплекс для его осуществления | 1984 |
|
SU1263870A1 |
КШАХТНЬЙ САМОХОДНЫЙ МАНИПУЛЯТОР, включающий дистанционно управляемую тележку, имеющую раму, манипулятор, имеющий стрелу, основание, захваты для монтажных элементов, поворотную головку с телевизионной ка/// Я /// ХУУ уУХ J // /// /// мерой и аппаратуру управления, отличающийся тем, что, с целью обеспечения вьшолнения монтажных операций при сборке арочной крепи и подвесной монорельсовой дороги, устройство снабжено дополнительным манипулятором, имеющим телескопические рычаги вертикального и горизонтального перемещения, соединенные между собой с возможностью поворота в вертикальной плоскости, при этом телескопический рычаг вертикального перемещения выполнен в виде трубчатой направляющей и опирающейся на нее через упорный подщипник с воза & можностью поворота в горизонтальной плоскости цапфы, внутри которых расW положен ползун, причем направлякяцая с через стрелу дополнительного манипулятора соединена с рамой тележки с возможностью поворота в вертикальной плоскости. tsD 4j CAd Ol о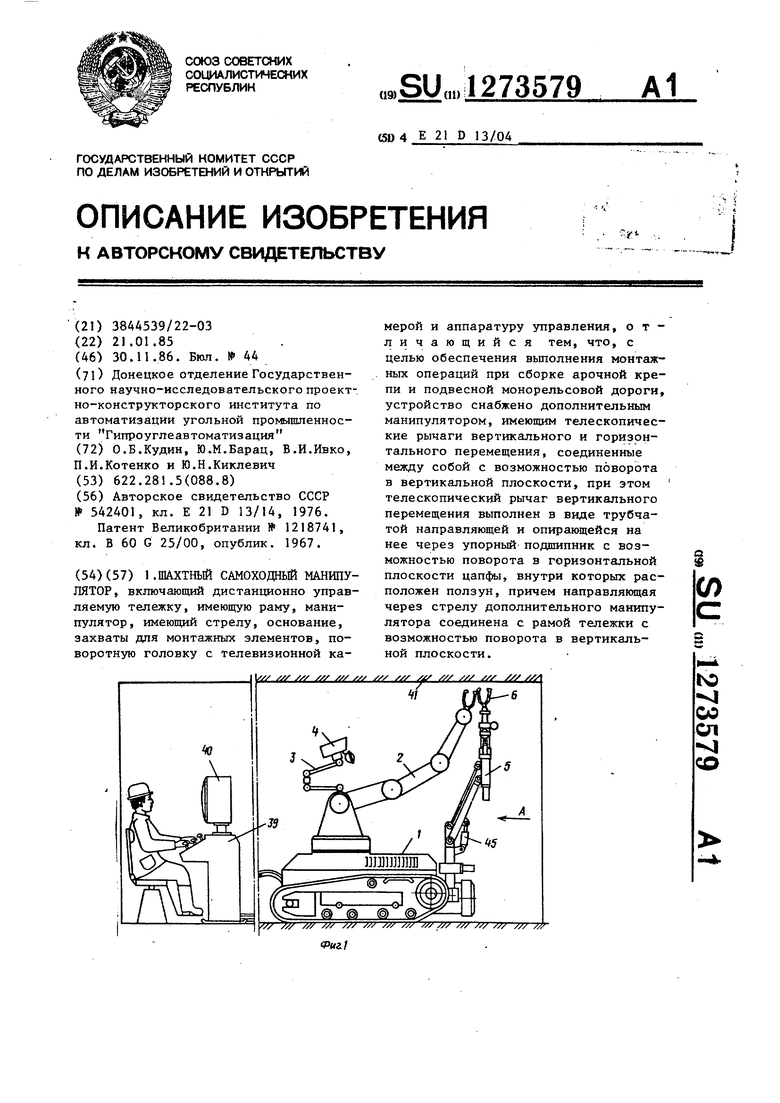
Изобретение относится к горному делу, а именно к механизации и автоматизации ряда операций при проведении горных выработок.
Целью изобретения является обеспечение вьшолнения монтажных операций при сборке арочной крепи и подвесной монорельсовой дороги.
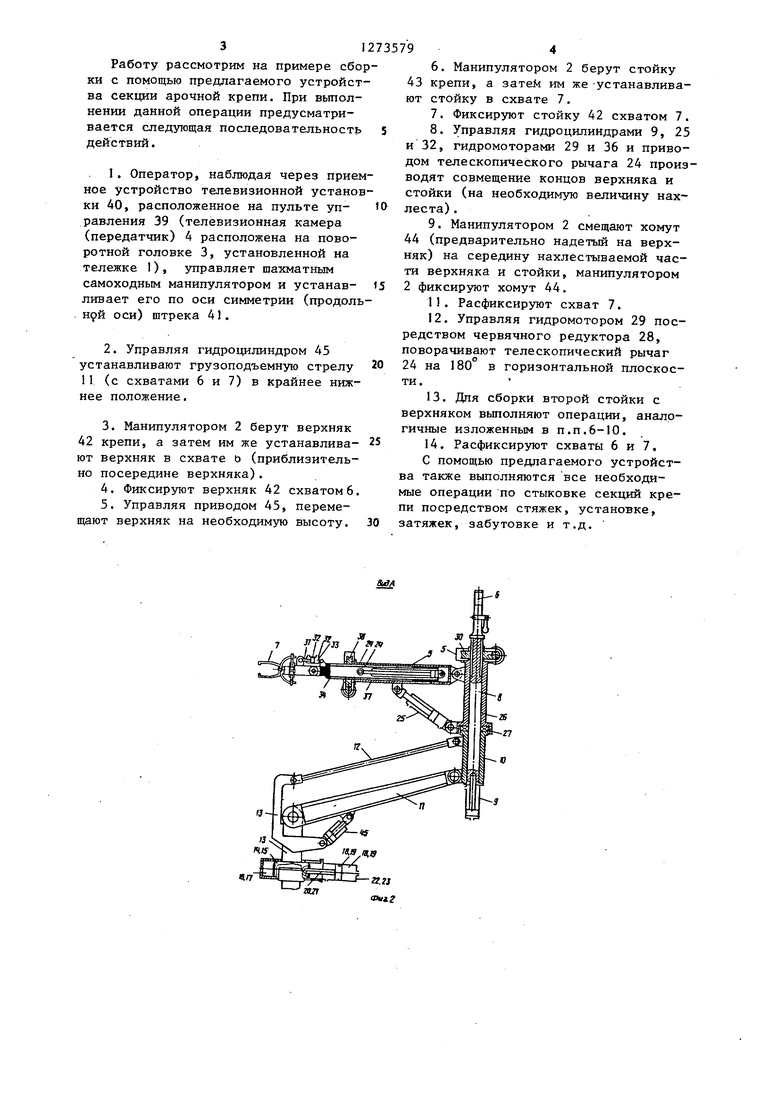
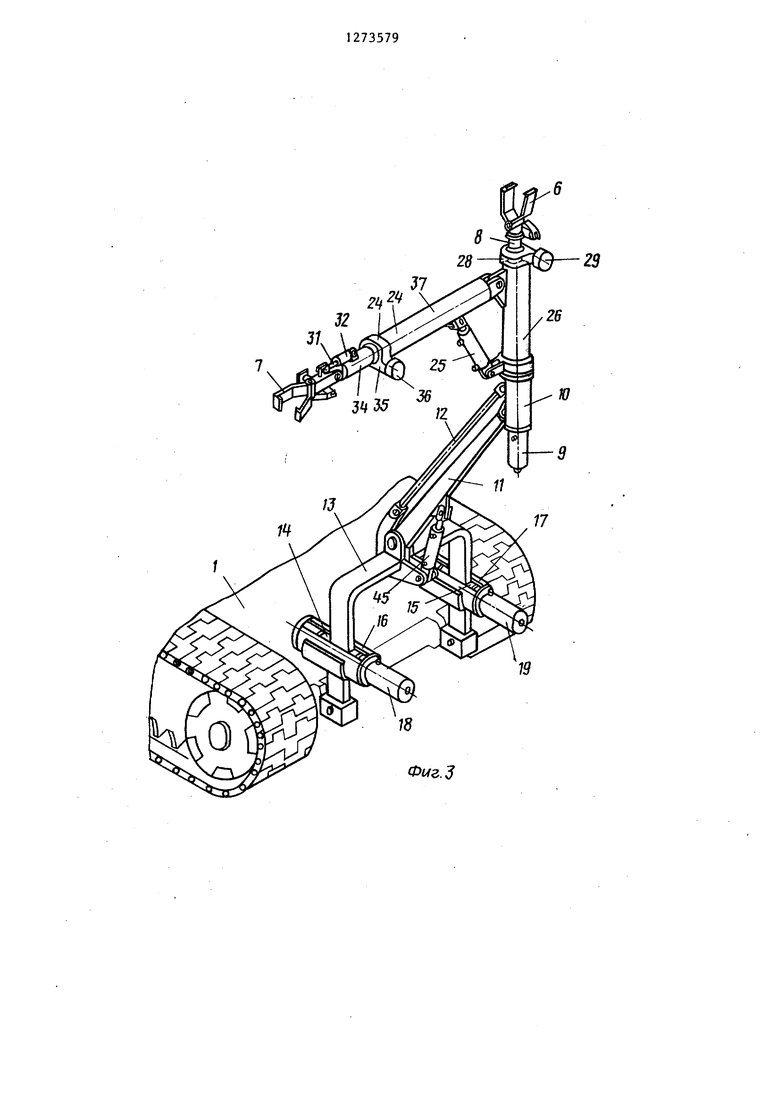
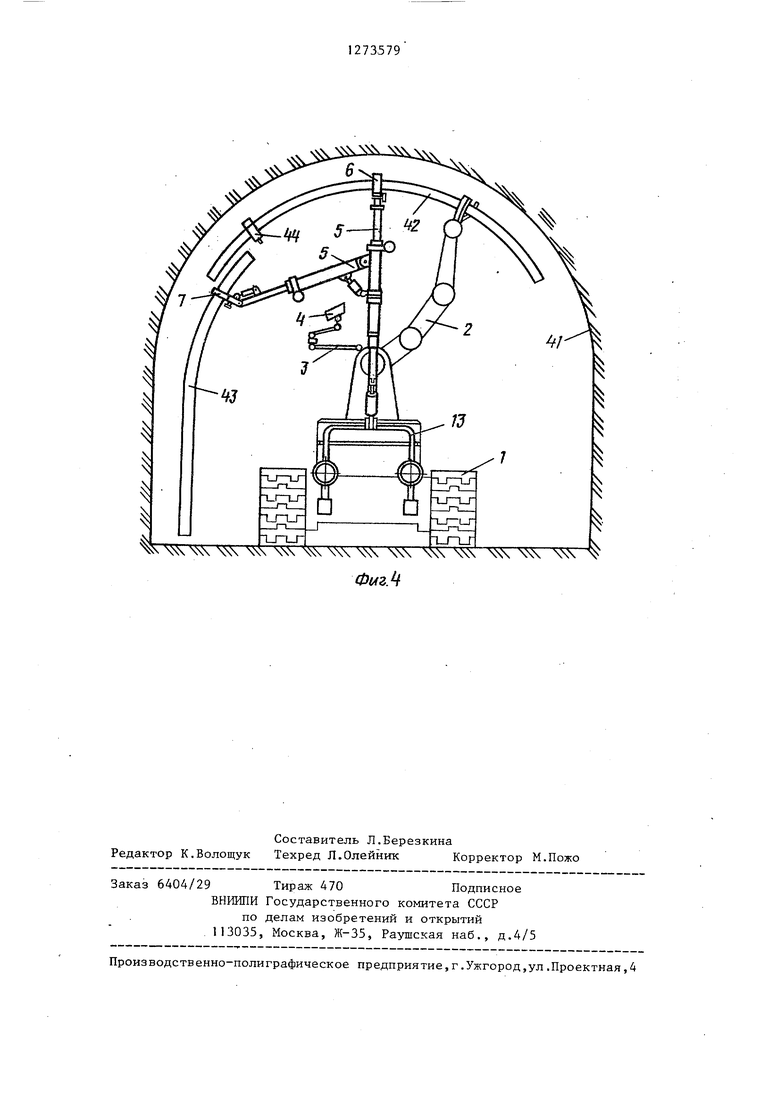
На фиг.1 изображен шахтный самоходный манипулятор, общий вид; на фиг.2 - вид А на фи.1 (на дополнительный манипулятор); на фиг.З дополнительный манипулятор, аксонометрия; на фиг.4 - сборка устройством арочной крепи.
Шахтный самоходный манипулятор состоит из дистанционно управляемых тележки I, манипулятора 2,, поворотной головки 3 с телевизионной камерой 4, дополнительного манипулятора 5, состоящего из гидроцилиндра вертикального и горизонтального и системы перемещения, вьтолненных в виде телескопических рычагов управления (не показано).
Дополнительный манипулятор 5 имеет два схвата 6 и 7. Схват 6 (для удержания, например, верхняка арочной крепи) закреплен на конце ползуна 8, имеющего возможность вертикального перемещения в трубчатой направляющей 10, шарнирно соединенного с одними концами грузоподъемной стрелы 11 и тяги 12, другие концы которых соединены также шарнирно с основанием 13, закрепленным на раме тележ.ки 1 с возможностью перемещения вдол ее продольной оси. Это обеспечивается за счет закрепления основания 13 на двух ползунах 14 и 15, имеющих возможность совместного осевого перемещения в стаканах 16 и 17 с помощью гидроцилиндров 18 и 19. Штоки 20 и 2 указанных гидроцилиндров соединен ы с ползунами 14 и 15, а корпуса
f2 и 23 - с торцовыми частями стаканов 16 и 17. Схват 7 (для удержания, например, стойки арочной крепи) закреплен на конце телескопического рычага 24, соединенного с возможностью поворота в вертикальной плоскости, посредством, например, гидравлического цилиндра 25, относительно цапфы 26, опирающейся через упорный
подшипник 27 на трубчатую направляющую 10. Цапфа 26 имеет возможность поворота в горизонтальной плоскости относительно ползуна 8 посредством, например, червячного редуктора 28
с приводом от гидромотора 29. Причем червячное колесо 30 редуктора 28 имеет с ползуном 8 пшицевое соединение. Схват 7 также имеет возможность наклона относительно продольной оси
телескопического рычага 24, горизонтального перемещения посредством, например, штока 31 гидроцилиндра 32, корпус 33 которого соединен шарнирно с выдвижной частью 34 телескопического рычага 24, а также поворота вокруг продольной оси указанного рычага посредством, например, червячного редуктора 35 с приводом от гидромотора 36, закрепленного на тор
оп-т
це неподвижной части 37 телескопичес кого рычага. Вьщвижная часть 34 телескопического рычага 24 имеет шлицевое соединение с червячным колесом 38 червячного редуктора 35.
На чертежах обозначено: 39 пульт управления, 40 - приемное устройство телевизионной установки, 41 - штрек, 42 и 43 - верхняк и стойка арочной крепи, 44 - хомут, 45 гидроцилиндр для перемещения грузоподъемной стрелы в вертикальной плоскости.
Манипулятор работает следующим образом.
Работу рассмотрим на примере сборки с помощью предлагаемого устройства секции арочной крепи. При выполнении данной операции предусматривается следующая последовательность действий.
42 крепи, а затем им же устанавливают верхняк в схвате ь (приблизительно посередине верхняка).
43крепи, а им же -устанавливают стойку в схвате 7.
44(предварительно надетый на верхняк) на середину нахлестываемой части верхняка и стойки, манипулятором 2 фиксируют хомут 44.
С помощью предлагаемого устройства также выполняются все необходимые операции по стыковке секций крепи посредством стяжек, установке, затяжек, забутовке и т.д.
19
18
Фиг.д
| Ходовая тележка шахтного крана | 1975 |
|
SU542401A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Патент Великобритании № 1218741, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
